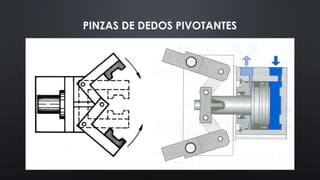
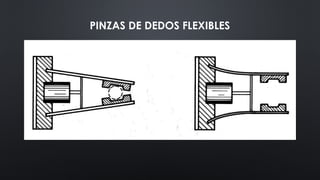
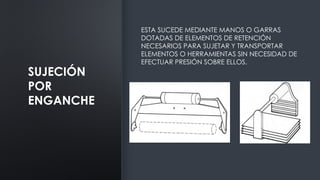
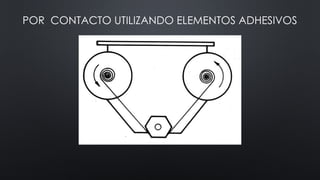
Los elementos terminales, o efectores finales, son dispositivos que permiten a los robots interactuar con su entorno, y su diseño específico es vital para determinar la capacidad del sistema robótico. Existen diferentes tipos, como pinzas, garras y herramientas, cada uno con características definidas que se adaptan a distintas aplicaciones y requerimientos de precisión y fuerza. Su selección requiere considerar factores como el tipo de objeto a manipular, el entorno de trabajo y la tarea a realizar.