Descargado 879 veces
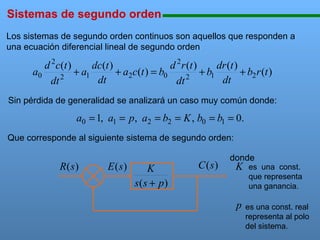
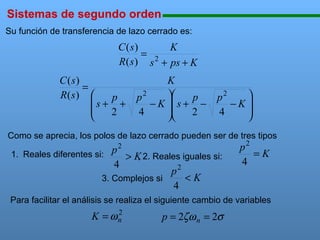
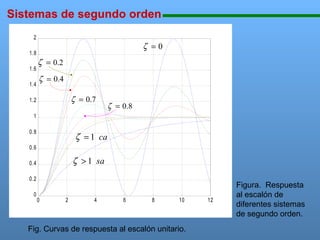
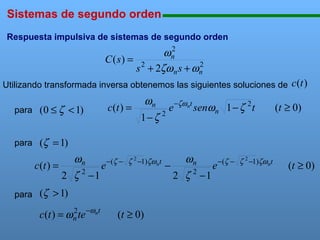
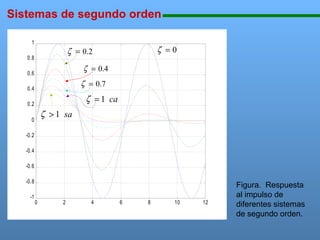
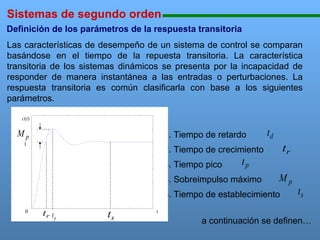
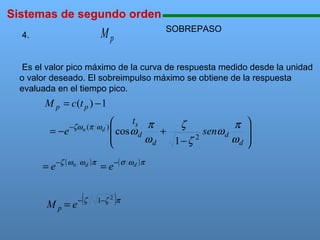
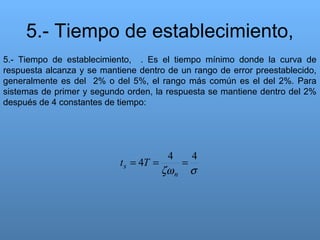
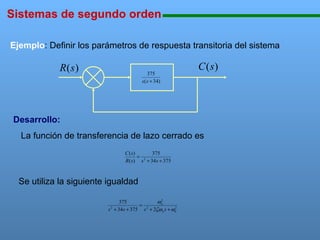
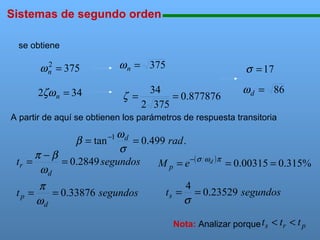
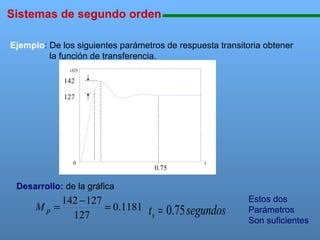
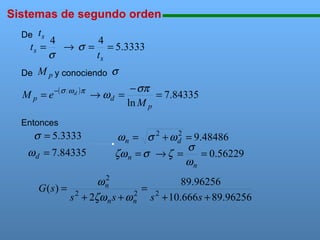

Este documento describe sistemas de segundo orden continuos. Explica que estos sistemas responden a ecuaciones diferenciales lineales de segundo orden. Analiza la función de transferencia de lazo cerrado y los tipos de polos que puede tener (reales diferentes, reales iguales, complejos). También define parámetros clave como la frecuencia natural, el factor de amortiguamiento y la respuesta a entradas como escalones y impulsos. Por último, define los principales parámetros que caracterizan la respuesta transitoria de un sistema de segundo orden, como el tiempo de retardo, cre























































































