Descargado 1059 veces


![3UHVHQWDFLyQ
(VWHWH[WRQDFHFRQODYRFDFLyQGHVHUXQDKHUUDPLHQWDSDUDODIRUPDFLyQGH
ORVLQJHQLHURVHQODPHFiQLFDGHPHGLRVFRQWLQXRV'HKHFKRHVHOIUXWRGHOD
H[SHULHQFLDGHPXFKRVDxRVHQODHQVHxDQ]DGHGLFKDGLVFLSOLQDHQOD(VFXHOD
GH,QJHQLHURVGHDPLQRVGHOD8QLYHUVLWDW3ROLWpFQLFDGHDWDOXQDWDQWRHQ
FXUVRV GH JUDGR WLWXODFLRQHV GH ,QJHQLHUtD GH DPLQRV DQDOHV 3XHUWRV H
,QJHQLHUtD*HROyJLFD](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-7-320.jpg)

![$ GLIHUHQFLD GH RWURV WH[WRV GH LQWURGXFFLyQ D OD PHFiQLFD GH PHGLRV
FRQWLQXRV HO TXH DTXt VH SUHVHQWD HVWi HVSHFtILFDPHQWH RULHQWDGR D OD
LQJHQLHUtDLQWHQWDQGRPDQWHQHUXQDGHFXDGRHTXLOLEULRHQWUHODULJXURVLGDGGH
OD IRUPXODFLyQ PDWHPiWLFD XWLOL]DGD OD FODULGDG GH ORV SULQFLSLRV ItVLFRV
WUDWDGRV DXQTXH SRQLHQGR HQ WRGR PRPHQWR OR SULPHUR DO VHUYLFLR GH OR
VHJXQGR (Q HVWH VHQWLGR HQ ODV LPSUHVFLQGLEOHV RSHUDFLRQHV YHFWRULDOHV
WHQVRULDOHV VH XWLOL]DQ VLPXOWiQHDPHQWH WDQWR OD QRWDFLyQ LQGLFLDO GH PiV
XWLOLGDGSDUDODGHPRVWUDFLyQPDWHPiWLFDULJXURVD](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-9-320.jpg)

![DXQTXH D
PHGLGDTXHVHDYDQ]DHQHOWH[WRH[LVWHXQDFODUDWHQGHQFLDKDFLDODQRWDFLyQ
FRPSDFWD HQ XQLQWHQWR GH IRFDOL]DU OD DWHQFLyQ GHO OHFWRU HQ OD FRPSRQHQWH
ItVLFDGHODPHFiQLFDGHPHGLRVFRQWLQXRV
(OFRQWHQLGRGHOWH[WRHVWiFODUDPHQWHGLYLGLGRHQGRVSDUWHVTXHVHSUHVHQWDQ
VHFXHQFLDOPHQWH (Q OD SULPHUD SDUWH FDStWXORV D](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-11-320.jpg)


![VH HVWXGLDQ IDPLOLDV HVSHFtILFDV GH PHGLRV
FRQWLQXRV FRPR VRQ ORV VyOLGRV ORV IOXLGRV HQ XQ SODQWHDPLHQWR TXH
FRPLHQ]D FRQ OD FRUUHVSRQGLHQWH HFXDFLyQ FRQVWLWXWLYD WHUPLQD FRQ ODV
IRUPXODFLRQHV FOiVLFDV GH OD PHFiQLFD GH VyOLGRV HOiVWLFRVOLQHDOHV HODVWR
SOiVWLFRV](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-14-320.jpg)

![)LQDOPHQWH VH KDFH
XQD EUHYH LQFXUVLyQ HQ ORV SULQFLSLRV YDULDFLRQDOHV SULQFLSLR GH ODV WUDEDMRV
YLUWXDOHV GH PLQLPL]DFLyQ GH OD HQHUJtD SRWHQFLDO](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-16-320.jpg)
![FRPR LQJUHGLHQWHV GH
SDUWLGD HQ OD UHVROXFLyQ GH SUREOHPDV GH PHFiQLFD GH PHGLRV FRQWLQXRV
PHGLDQWH PpWRGRV QXPpULFRV (VWD HVWUXFWXUD SHUPLWH OD XWLOL]DFLyQ GHO WH[WR
FRQ SURSyVLWRV GRFHQWHV WDQWR HQ XQ ~QLFR FXUVR GH DOUHGHGRU GH KRUDV
OHFWLYDVFRPRHQGRVFXUVRVGLIHUHQFLDGRVHOSULPHUREDVDGRHQORVSULPHURV
FLQFRFDStWXORVGHGLFDGRDODLQWURGXFFLyQGHORVIXQGDPHQWRVGHODPHFiQLFD
GHPHGLRVFRQWLQXRVHOVHJXQGRHVSHFtILFDPHQWHGHGLFDGRDODPHFiQLFDGH
VyOLGRVODPHFiQLFDGHIOXLGRV
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-17-320.jpg)







![1 Descripción del movimiento
2
N O T A C I Ó N
Se utilizarán
indistintamente las
notaciones ( X , Y , Z )
Consideremos ahora el sistema de coordenadas cartesianas ( X , Y , Z ) de la
ˆ ˆ ˆ
Figura 1-1 y la correspondiente base ortonormal (e1 , e 2 , e 3 ) . En la
configuración de referencia Ω 0 el vector de posición X de una partícula que
ocupa un punto P en el espacio (en el instante de referencia) viene dado por:
y ( X 1 , X 2 , X 3 ) para
designar al sistema de
coordenadas
cartesianas.
N O T A C I Ó N
En el resto de este
texto se utilizará la
notación de Einstein o de
índices repetidos. Toda
repetición de un índice en un
mismo monomio de una
expresión algebraica supone
el sumatorio respecto a dicho
índice. Ejemplos:
i =3
t = t0
X3, Z
ˆ
e3
X
Ω0
t0
Ωt
t
t
P
Ω0
Ωt
x
(1.1)
– Configuración de referencia
– Instante de referencia
– Configuración actual
– Instante actual
P’
not
ˆ
ˆ
∑ X iei = X iei
i =1
k =3
∑ a ik bkj
=
k 1
i =3 j =3
i =1 j =1
ˆ
e1
ˆ
e2
X 2 ,Y
not
= aik bkj
∑∑ aij bij
X1, X
not
= a ij bij
N O T A C I Ó N
Se distingue aquí entre
el vector (ente físico)
X y su vector de
componentes [X].
Frecuentemente se
obviará esta distinción
N O T A C I Ó N
Siempre que sea
posible, se denotará
con letras mayúsculas a
las variables que se
refieran a la
configuración de
referencia Ω 0 y con
letras minúsculas a las
variables referidas a la
configuración actual
Ωt
ˆ
ˆ
ˆ
ˆ
X = X 1e1 + X 2 e 2 + X 3 e 3 = X i e i
Figura 1-1 – Configuraciones del medio continuo
donde a las componentes ( X 1 , X 2 , X 3 ) se las denomina coordenadas materiales
(de la partícula).
X1
[X] = X 2
X
3
def
= coordenadas materiales
(1.2)
En la configuración actual Ω t , la partícula situada originalmente en el punto
material P (ver Figura 1-1) ocupa el punto espacial P' y su vector de posición
x viene dado por:
ˆ
ˆ
ˆ
ˆ
x = x1e1 + x 2 e 2 + x 3 e 3 = xi e i
(1.3)
donde a ( x1 , x 2 , x 3 ) se las denomina coordenadas espaciales de la partícula en el
instante de tiempo t .
x1
[x] = x 2
x
3
def
= coordenada s espaciales
© Els autors, 2002; © Edicions UPC, 2002
(1.4)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-25-320.jpg)

![1 Descripción del movimiento
4
R E C O R D A T O R I O
Se define el operador
de dos índices Delta de
Kronecker
not
= δ ij
como:
0 i ≠ j
δ ij =
1 i = j
El tensor unidad 1 de
segundo orden se
define entonces como
Observación 1-2
En el instante de referencia t = 0 resulta x(X, t ) t =0 = X . En
consecuencia x = X , y = Y , z = Z son las ecuaciones del
movimiento en el instante de referencia y el Jacobiano en dicho
instante resulta ser:
J (X,0) =
∂x
∂ ( xyz )
= det i
∂( XYZ )
∂X j
= det δ ij = det 1 = 1
[ ]
[1]ij = δ ij
Observación 1-3
La expresión x = ϕ(X, t ) , particularizada para un valor fijo de las
coordenadas materiales X , proporciona la ecuación de la trayectoria de
la partícula (ver Figura 1-2).
tn
t1
X3, Z
t0
(X 1 , X 2 , X 3 )
ˆ
e3
ˆ
e1
trayectoria
ˆ
e2
X 2 ,Y
X1, X
Figura 1-2 – Trayectoria de una partícula
Ejemplo 1-1 – La descripción espacial del movimiento de un medio continuo viene dada
por:
x1 = X 1 e 2 t
x = X e 2t
x(X , t ) ≡ x 2 = X 2 e −2 t
≡ y = Y e −2 t
2t
2t
z = 5 X t + Z e
x3 = 5 X 1 t + X 3 e
Obtener las ecuaciones del movimiento inversas.
El determinante del Jacobiano resulta:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-27-320.jpg)






![1 Descripción del movimiento
11
a.2) Velocidad en descripción espacial
Sustituyendo los valores x e y dados en la forma canónica vista anteriormente,
es posible obtener la forma espacial de la velocidad como:
∂x
v x = ∂t = ω y ω y
v(x, t ) =
=
v = ∂y = − ω x − ω x
y ∂t
b.1) Aceleración en descripción material:
A (X, t ) =
∂V (X, t )
∂t
∂v x
2
2
∂t = − Xω cos(ωt ) − Yω sin(ωt )
2 X cos(ωt ) + Ysin(ωt )
A (X , t ) =
=−ω
− Xsin(ωt ) + Y cos(ωt )
∂v y = Xω 2 sin(ωt ) − Yω 2 cos(ωt )
∂t
b.2) Aceleración en descripción espacial:
Sustituyendo las ecuaciones del movimiento inversas en la ecuación anterior:
a x = −ω 2 x
a(x, t ) = A( X( x, t ), t ) ≡
2
a y = − ω y
Esta misma expresión podría ser obtenida si se considera la expresión de la
velocidad v (x, t ) y la expresión de la derivada material en (1.15):
dv(x, t ) ∂v(x, t )
=
+ v (x, t ) ⋅ ∇v(x, t ) =
a(x, t ) =
dt
∂t
∂
∂x
∂ ωy
=
+ [ωy − ωx ] ∂ [ωy − ωx ] =
∂t − ωx
∂y
∂
∂
∂x (ωy ) ∂x (− ωx ) − ω 2 x
0
= + [ωy − ωx ] ∂
= 2
∂
0
(ωy )
(− ωx ) − ω y
∂y
∂y
Obsérvese que el resultado obtenido por los dos procedimientos es idéntico.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-34-320.jpg)





![1 Descripción del movimiento
18
Para ello se impone la condición de pertenencia de un mismo punto a las dos
curvas, en términos de los parámetros λ* y s * :
( ) (
g s * = f C1 , C 2 , C3 , λ* , t
)
(1.30)
Con lo cual se obtiene un sistema de tres ecuaciones del cual se puede despejar,
por ejemplo, s * , λ* , C 3 , esto es:
s * = s * (C1 , C 2 , t )
λ* = λ* (C1 , C 2 , t )
(1.31)
C 3 = C 3 (C1 , C 2 , t )
Sustituyendo (1.31) en (1.30) se obtiene:
x = f (C1 , C2 , C3 (C1 , C 2 , t ), λ (C1 , C2 , t ), t ) = h (C1 , C2 , t )
(1.32)
que constituye la expresión parametrizada (en función de los parámetros
C1 ,C 2 ) del tubo de corriente, para cada instante t (ver Figura 1-9).
t
s =1
s=0
Z
λ = 0,1,2...
*
*
s ;λ
Y
X
Figura 1-9 – Tubo de Corriente
1.10 Línea de traza
Definición:
Línea de traza, relativa a un punto fijo en el espacio x * denominado
punto de vertido y a un intervalo de tiempo denominado tiempo de vertido
[t i , t f ], es el lugar geométrico de las posiciones que ocupan en un
instante t , todas las partículas que han pasado por x * en un instante
τ ∈ [t i , t ] ∩ [t i , t f ].
La anterior definición corresponde al concepto físico de la línea de color (traza)
que se observaría en el medio en el instante t , si se vertiese un colorante en el
punto de vertido x * durante el intervalo de tiempo [t i , t f ] (ver Figura 1-10).
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-41-320.jpg)
![19
1 Descripción del movimiento
(x , y
*
*
,z
*
τ = ti
) punto de vertido
τ = t1
z
τ = t2
τ =tf
t
y
x
Figura 1-10 – Línea de traza
1.10.1 Ecuación de la línea de traza
Para determinar la ecuación de la línea de traza es necesario identificar las
partículas que pasan por el punto x * en los correspondientes instantes τ .
Partiendo de las ecuaciones del movimiento dadas por (1.5) y (1.6) se trata de
determinar cuál es la etiqueta de la partícula que en el instante de tiempo τ
pasa por el punto de vertido. Para ello se plantea:
x * = x(X, τ )
xi* = xi (X, τ )
⇒ X = f (τ )
i ∈1, 2,3
(1.33)
Sustituyendo (1.33) en las ecuaciones del movimiento (1.5) se obtiene:
x = ϕ (f (τ ), t ) = g( τ, t )
[
τ ∈ [ti , t ]∩ ti , t f
]
(1.34)
La expresión (1.34) constituye, para cada instante t , la expresión paramétrica
(en términos del parámetro τ ) de un segmento curvilíneo en el espacio que es
la línea de traza en dicho instante.
Ejemplo 1-7 – Sea un movimiento definido por las siguientes ecuaciones del movimiento:
x = (X + Y ) t 2 + X cos t
y = (X + Y )cos t − X
Obtener la ecuación de la línea de traza asociada al punto de vertido x * = (0,1) para el
periodo de vertido [t 0 ,+∞) .
Las coordenadas materiales de la partícula que han pasado por el punto de
vertido en el instante τ están dadas por:
−τ2
X = 2
2
0=(X +Y) τ2 + X cos τ τ +cos τ
⇒
1=(X +Y)cos τ− X τ2 +cosτ
Y = τ2 +cos2τ
Por lo tanto la etiqueta de las partículas que han pasado por el punto de vertido
desde el instante de inicio de vertido t 0 hasta el instante actual t queda
definida por:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-42-320.jpg)
![1 Descripción del movimiento
20
− τ2
2
2
τ + cos τ
τ ∈ [t 0 , t ] ∩ [t 0 , ∞] = [t 0 , t ]
τ 2 + cos τ
Y= 2
τ + cos 2 τ
X=
De aquí substituyendo en las ecuaciones del movimiento se obtienen las
ecuaciones de la línea de traza:
cos τ
− τ2
cos t
x= 2
t2 + 2
τ + cos 2 τ
τ + cos 2 τ
x = g( τ, t ) ≡
cos τ
− τ2
y =
cos t − 2
τ 2 + cos 2 τ
τ + cos 2 τ
τ ∈ [t 0 , t ]
Observación 1-8
En un problema estacionario las líneas de traza son segmentos de las
trayectorias (o de las líneas de corriente). La justificación se basa en el
hecho de que en el caso estacionario la trayectoria sigue la envolvente
del campo de velocidades que permanece constante con el tiempo. Si
se considera un punto de vertido, x* , todas las partículas que pasan
por él seguirán porciones (segmentos) de la misma trayectoria.
1.11 Superficie material
Definición:
Superficie material: Superficie móvil en el espacio constituida siempre
por las mismas partículas (puntos materiales).
En la configuración de referencia Ω 0 la superficie Σ 0 podrá definirse en
términos de una función de las coordenadas materiales F ( X , Y , Z ) como:
Σ 0 := { X , Y , Z
| F (X,Y,Z ) = 0}
Observación 1-9
La función F ( X , Y , Z ) no depende del tiempo, lo que garantiza que
las partículas, identificadas por su etiqueta, que cumplen la ecuación
F ( X , Y , Z ) = 0 son siempre las mismas de acuerdo con la definición
de superficie material.
© Els autors, 2002; © Edicions UPC, 2002
(1.35)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-43-320.jpg)

![1 Descripción del movimiento
22
Ejemplo 1-8 – En la teoría de oleaje se impone la condición de que la
superficie libre del fluido que está en contacto con la atmósfera sea una
superficie material. Es decir, esta restricción supone que la superficie libre está
formada siempre por las mismas partículas (hipótesis razonable sobre todo en
aguas profundas).
Si se supone que z = η(x , y , t ) define la altura de la superficie del mar respecto
a un nivel de referencia, la superficie libre del agua vendrá definida por:
f (x , y , z , t ) ≡ z − η(x, y , t ) = 0 .
z
superficie libre
y
x
z = η (x, y, t ) =cota
de la superficie libre
Figura 1-12
df
= 0 se escribe como:
La condición
dt
∂f
∂η
=−
∂t
∂t
∂f
∂x
∂f
∂f
∂f
∂f
v ⋅ ∇f = v x v y v z
= v x ∂x + v y ∂y + v z ∂z
∂
y
∂f
∂z
[
]
∂η
∂η
∂η
df ∂f
=
+ v ⋅ ∇f = −
− vx
− vy
+ vz = 0 ⇒
∂t
∂x
∂y
dt ∂t
∂η
∂η
∂η
vz =
+ vx
+vy
∂t
∂x
∂y
Es decir, la condición de superficie material se traduce en una condición sobre
la componente vertical del campo de velocidades.
1.12 Superficie de control
Definición:
Superficie de control: Una superficie fija en el espacio.
Su descripción matemática viene dada por:
Σ := { x |
f (x, y, z ) = 0}
© Els autors, 2002; © Edicions UPC, 2002
(1.37)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-45-320.jpg)



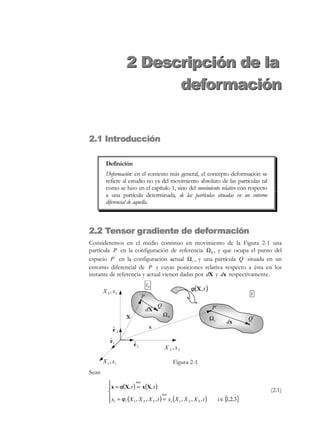
![2 Descripción de la deformación
26
las ecuaciones del movimiento. Diferenciando (2.1) con respecto a las
coordenadas materiales X resulta:
Ecuación fundamenta l
de la deformació n
N O T A C I Ó N
Se considera aquí la
forma simbólica del
operador Nabla material:
∂
ˆ
ei
∇≡
∂X i
aplicada a la expresión
del producto tensorial o
abierto:
[a ⊗ b]ij
= ai b j
= [a b ]ij =
not
→
∂x i
dx i = ∂X dX j
#!
j
Fij
dx = F ⋅ dX
i, j ∈{1,2,3}
(2.2)
La ecuación (2.2) define el tensor gradiente material de la deformación F( X, t ) :
not
F = x ⊗ ∇
Tensor gradiente material
→
∂xi
de la deformació n
i, j ∈{1,2,3}
Fij =
∂X j
(2.3)
Las componentes explícitas del tensor F vienen dadas por:
∂x1
∂X 1
x1
∂
∂x 2
∂
∂
[F ] = x ⊗ ∇ = x 2
=
∂X
∂
∂X 3
1
%%%X 2 %% ∂X 1
x3 #
%
!
$
∂x 3
T
[x]
∇
∂X 1
[
∂x1
∂X 2
∂x 2
∂X 2
∂x 3
∂X 2
]
∂x1
∂X 3
∂x 2
∂X 3
∂x 3
∂X 3
(2.4)
Observación 2-1
El tensor gradiente de la deformación F(X, t ) contiene la información del
movimiento relativo, a lo largo del tiempo t , de todas las partículas
materiales en el entorno diferencial de una dada, identificada por sus
coordenadas materiales X . En efecto, la ecuación (2.2) proporciona
la evolución del vector de posición relativo dx en función de la
correspondiente posición relativa dX en el instante de referencia. En
este sentido, si se conoce el valor de F( X, t ) se dispone de la
información asociada al concepto general de deformación definida en
la sección 2.1
2.2.1 Tensor gradiente de la deformación inverso
Considerando ahora las ecuaciones de movimiento inversas:
not
−1
X = ϕ (x, t ) = X(x, t )
not
X = ϕ −1 (x , x , x , t ) = X (x , x , x , t )
i
i 1
1
2
3
2
3
i
1
i ∈ { ,2,3}
y diferenciando (2.5) con respecto a las coordenadas espaciales xi , resulta:
© Els autors, 2002; © Edicions UPC, 2002
(2.5)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-49-320.jpg)
![27
2 Descripción de la deformación
∂X i
dX i = ∂x dx j i, j ∈{1,2,3}
j
#!
F−1
ij
dX = F −1 ⋅ dx
(2.6)
Al tensor definido por al ecuación (2.6) se le denomina tensor gradiente espacial
de la deformación o tensor gradiente (material) de la deformación inverso y viene
caracterizado por:
N O T A C I Ó N
−1 not
F = X ⊗ ∇
Tensor gradiente espacial
→ −1 ∂X
i
de la deformació n
i, j ∈{1,2,3}
Fij =
∂x j
Se considera aquí la
forma simbólica del
operador Nabla espacial
∇≡
∂
ˆ
ei .
∂x i
Obsérvese la diferencia
de notación entre dicho
operador espacial ( ∇ )
y el operador Nabla
material ( ∇ ).
(2.7)
Las componentes explícitas del tensor F −1 vienen dadas por:
[F ]
−1
∂X 1
∂x1
X1
∂
∂
∂ ∂X 2
= [X ⊗ ∇ ] = X 2
=
∂x ∂x
∂ 3
1
%% 2 %x! ∂x1
X 3 #
% % %
#!
∂X 3
[∇ ]T
[X]
∂x1
∂X 1
∂x 2
∂X 2
∂x 2
∂X 3
∂x 2
∂X 1
∂x3
∂X 2
∂x3
∂X 3
∂x3
(2.8)
Observación 2-2
R E C O R D A T O R I O
Se define el operador
de dos índices Delta de
Kronecker δ ij como:
1 si i = j
δ ij =
0 si i ≠ j
El tensor unidad de 2º
orden 1 viene definido
por: [1]ij = δ ij .
El tensor gradiente espacial de la deformación, denotado en (2.6) y
(2.7) mediante F −1 , es efectivamente el inverso del tensor gradiente
(material) de la deformación F . La comprobación es inmediata
puesto que:
∂x i ∂X k ∂x i not
=
= δ ij
∂X k ∂x j ∂x j
$$
F
−1
ik F
⇒ F ⋅ F −1 = 1
kj
∂X i not
∂X i ∂x k
= δ ij
=
∂x k ∂X j ∂X j
$$
F−1 F
ik
⇒ F −1 ⋅ F = 1
kj
Ejemplo 2-1 – Para un determinado instante, el movimiento de un medio continuo viene
definido por:
x1 = X 1 − AX 3 , x 2 = X 2 − AX 3 , x 3 = − AX 1 + AX 2 + X 3 .
Obtener el tensor gradiente material de la deformación F(X) en dicho instante. A partir de
las ecuaciones de movimiento inversas obtener el tensor gradiente espacial de la deformación
F −1 ( x) . Con los resultados obtenidos comprobar que F ⋅ F −1 = 1 .
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-50-320.jpg)
![2 Descripción de la deformación
28
a) Tensor gradiente material de la deformación:
[]
F = x ⊗ ∇ ≡ [x] ⋅ ∇
T
X 1 − AX 3
⋅ ∂ ,
=
X 2 − AX 3
∂X
− AX 1 + AX 2 + X 3 1
1 0 − A
= 0 1 − A
− A A 1
∂
,
∂X 2
∂
=
∂X 3
b) Ecuaciones de movimiento inversas: De la inversión algebraica de las ecuaciones
de movimiento se obtiene:
X 1 = (1 + A 2 ) x1 − A 2 x 2 + A x 3
X( x, t ) ≡ X 2 = A 2 x1 + (1 − A 2 ) x 2 + A x3
X = A x − A x + x
1
2
3
3
c) Tensor gradiente espacial de la deformación:
F −1 = X ⊗ ∇ ≡ [X]⋅ [∇ ]
T
(1 + A 2 ) x1 − A 2 x 2 + A x3
∂
,
= A 2 x1 + (1 − A 2 ) x 2 + A x3 ⋅
∂x1
A x1 − A x 2 + x 3
1 + A 2 − A 2
1 − A2
= A2
A
−A
∂
,
∂x 2
∂
=
∂x3
A
A
1
d) Comprobación:
F⋅F
−1
0 − A 1 + A 2 − A 2
1
1 − A2
≡ 0 1 − A ⋅ A 2
− A A 1 A
−A
A 1 0 0
A = 0 1 0 ≡ 1
1 0 0 1
2.3 Desplazamientos
Definición:
Desplazamiento: diferencia entre los vectores de posición de una misma
partícula en las configuraciones actual y de referencia.
El desplazamiento de una partícula P en un instante determinado viene
definido por el vector u que une los puntos del espacio P (posición inicial) y
P ′ (posición en el instante actual t ) de la partícula (ver Figura 2-2). El
desplazamiento de todas las partículas del medio continuo define el campo
vectorial de desplazamientos que, como toda propiedad del medio continuo, podrá
describirse en forma material U( X, t ) o espacial, u(x, t ) :
U( X, t ) = x( X, t ) − X
U i ( X, t ) = x i (X, t ) − X i
i ∈{1,2,3}
© Els autors, 2002; © Edicions UPC, 2002
(2.9)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-51-320.jpg)

![2 Descripción de la deformación
30
∂u i
du i = ∂x dx j = jij dx j
j
du = j ⋅ dx
i, j ∈{1,2,3}
(2.16)
2.4 Tensores de deformación
Consideremos ahora una partícula del medio continuo, que ocupa el punto del
espacio P en la configuración material, y otra partícula Q de su entorno
diferencial separada de la anterior por el segmento dX (de longitud
dS = dX ⋅ dX ) siendo dx (de longitud ds = dx ⋅ dx ) su homólogo en la
configuración actual (ver Figura 2-3). Ambos vectores diferenciales están
relacionados por el tensor gradiente de la deformación F( X, t ) mediante las
ecuaciones (2.2) ó (2.6):
dx = F ⋅ dX
dxi = Fij dX j
dX = F -1⋅ dx
dX i = Fij−1 dx
(2.17)
j
F(X, t )
t
t0
Q′
X 3 , x3
Q
dX
ˆ
e3
dS
P
X
ds
dx
P′
x
O
ˆ
e1
ˆ
e2
X 1 , x1
X 2 , x2
Figura 2-3
Puede escribirse entonces:
(ds )2 = dx ⋅ dx = [dx]T ⋅ [dx ] = [F ⋅ dX ]T ⋅ [F ⋅ dX]= dX ⋅ F T ⋅ F ⋅ dX
(ds )2 = dxk dxk = Fki dX i Fkj dX j = dX i Fki Fkj dX j = dX i FikT Fkj dX j
(2.18)
y, alternativamente,
N O T A C I Ó N
Se utiliza la convención:
[(•) ]
not
−1 T
= (•)
−T
(dS )2 = dX ⋅ dX = [dX ]T ⋅ [dX ] = [F −1 ⋅ dx] ⋅ [F −1 ⋅ dx ] = dx ⋅ F −T ⋅ F −1 ⋅ dx
(dS )2 = dX k dX k = Fki−1 dxi Fkj−1 dx j = dxi Fki−1 Fkj−1dx j = dxi Fik−T Fkj−1dx j
T
not
(2.19)
2.4.1 Tensor material de deformación (tensor de deformación
de Green-Lagrange)
Restando las expresiones (2.18) y (2.19) se obtiene:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-53-320.jpg)


![33
2 Descripción de la deformación
1
2
b) Tensor espacial de deformación: e = (1 − F −T ⋅ F −1 ) =
1 0 0 1 + A 2
A2
1
= 0 1 0 − − A 2 1 − A 2
2
0 0 1 A
A
− 3 A 2 − 2 A 4
1 2
= A + 2 A4
2
− 2 A − 2 A3
A 1 + A 2 − A 2
1 − A2
− A ⋅ A 2
1 A
−A
A2 + 2 A4
A2 − 2 A4
2 A3
A
A =
1
− 2 A − 2 A3
2 A3
− 2 A2
(Obsérvese que E ≠ e ).
2.4.3 Expresión de los tensores de deformación en términos de
los (gradientes de los) desplazamientos
Substituyendo las expresiones (2.12) ( F = 1 + J ) y (2.15) ( F −1 = 1 − j ) en las
ecuaciones (2.21) y (2.23) se obtienen las expresiones de los tensores de
deformación en función del gradiente material, J ( X, t ) , y espacial, j( x, t ) , de
los desplazamientos:
[
] [
]
1
1
T
T
T
E = 2 (1 + J ) ⋅ (1 + J ) − 1 = 2 J + J + J ⋅ J
E( X, t ) →
∂U j ∂U k ∂U k
E ij = 1 ∂U i +
+
i, j ∈{1, 2,3}
2 ∂X j ∂X i
∂X i ∂X j
[
] [
(2.24)
]
1
1
T
T
T
e = 2 1 − (1 − j ) ⋅ (1 − j) = 2 j + j − j ⋅ j
e( x, t ) →
∂u
eij = 1 ∂u i + j − ∂u k ∂u k i, j ∈{1, 2,3}
2 ∂x j ∂x i
∂x i ∂x j
(2.25)
2.5 Variación de las distancias:
Estiramiento. Alargamiento unitario
Consideremos ahora una partícula P en la configuración de referencia y otra
partícula Q , situada en un entorno diferencial de P, ver Figura 2-4. Las
correspondientes posiciones en la configuración actual vienen dadas por los
puntos del espacio P ' y Q ' de tal forma que las distancia entre ambas
partículas en la configuración de referencia, dS , se transforma en ds en el
instante actual. Sean T y t sendos vectores unitarios en las direcciones PQ y
P ′Q ′ , respectivamente.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-56-320.jpg)


![2 Descripción de la deformación
36
Ejemplo 2-3 – El tensor espacial de deformación para un cierto movimiento es:
0
0
− te tz
0
0
e(x, t ) = 0
− te tz 0 t (2e tz − e t )
Calcular la longitud, en el instante t = 0 del segmento que en el instante t = 2 es rectilíneo y
une los puntos a ≡ (0,0,0) y b ≡ (1,1,1) .
Se conoce la forma y posición geométrica del segmento material en el instante
t = 2 . En el instante t = 0 (instante de referencia) el segmento no es
necesariamente rectilíneo y no se conocen las posiciones de sus extremos A y
B (ver Figura 2-5). Para conocer su longitud hay que aplicar la ecuación (2.31):
λ=
1
1− 2t ⋅e⋅t
=
t=0
z
ds
dS
⇒ dS =
1
ds
λ
t =2
z
B
ds
dS
t
b(1,1,1)
A
a(0,0,0)
y
y
x
x
Figura 2-5
para un vector de dirección en la configuración espacial t de valor:
t=
1
3
[1,
1, 1]T obteniéndose:
0
0
− te tz 1
1
0
t ⋅e⋅t =
[1 1 1]⋅ 0 0
⋅ 1
3
− te tz 0 t ( 2e tz − e t ) 1
1
1
⇒ λ=
⇒ λ t =2 =
=
2 t
4 2
1 + te
1+ e
3
3
B
b1
1 b
1
1
3 ⇒
⇒ l AB = ∫ dS = ∫ ds = ∫ ds = l ab =
A
aλ
a
λ$ λ
λ
lab
1
1
= − te t
3
3
3
3 + 4e 2
l AB = 3 + 4e 2
2.6 Variación de ángulos
Consideremos ahora una partícula P y otras dos partículas Q y R , situadas en
un entorno diferencial de P en la configuración material, ver Figura 2-6, y las
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-59-320.jpg)
![37
2 Descripción de la deformación
mismas partículas ocupando las posiciones espaciales P ' , Q ' y R ' . Se plantea
ahora la relación entre los ángulos que forman los correspondientes segmentos
diferenciales en la configuración de referencia (ángulo Θ ), y en la configuración
actual (ángulo θ ).
A partir de las ecuaciones (2.2)y (2.6), aplicadas a los vectores diferenciales que
separan las partículas puede escribirse,
(1)
(1)
dx = F ⋅ dX
(2 )
dx = F ⋅ dX ( 2 )
−1
(1)
(1)
dX = F ⋅ dx
⇒ ()
dX 2 = F −1 ⋅ dx (2 )
(2.32)
y por la propia definición de los vectores unitarios T (1) , T (2 ) , t (1 ) y t (2 ) que
definen las correspondientes direcciones en la Figura 2-6:
(1) (1)
(1)
dX = dS T
(2 )
dX = dS (2 ) T (2 )
(1) (1)
(1)
dx = ds t
(2 )
dx = ds (2 ) t (2 )
(2.33)
t
t0
T (2 )
X3
t (2 )
R
(2 )
dS
P
Θ
T (1)
dS (1) Q
X
R´
ds (2 )
θ
P´ ds (1 )
Q´
t (1 )
x
X2
Figura 2-6
X1
y, finalmente, por la definición (2.26) de los correspondientes estiramientos:
(1) 1
(1 )
dS = λ(1) ds
ds (1) = λ(1 ) dS (1)
(2 ) (2 ) (2 ) ⇒
ds = λ dS
dS (2 ) = 1 ds (2 )
λ(2 )
(2.34)
Planteando ahora el producto escalar de los vectores dx (1) ⋅ dx (2 ) :
[ ] ⋅ [dx ( ) ]=
ds (1) ds (2 ) cos θ = dx (1 ) ⋅ dx (2 ) cos θ = dx (1 ) ⋅ dx (2 ) = dx (1)
[
= F ⋅ dX (1 )
= dS
(1)
(1 )
T
2
F F
] ⋅ [F ⋅ dX ( ) ]= dX ( ) ⋅ (#⋅!)⋅ dX ( ) =
T
2
T
1
2
2E+1
T ⋅ (2E + 1) ⋅ T
(2 )
(2 )
1
(1)
(1 )
= (1) ds T ⋅ ( 2E + 1) ⋅ T
λ
1 1
= ds (1 ) ds (2 ) (1) (2 ) T (1) ⋅ ( 2E + 1) ⋅ T (2 )
λ λ
dS
(2 )
1
λ(2 )
ds
(2 )
=
y comparando los términos inicial y final de la ecuación (2.35) se obtiene:
© Els autors, 2002; © Edicions UPC, 2002
(2.35)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-60-320.jpg)

![2 Descripción de la deformación
39
Se pretende conocer la longitud de P´Q´ después de la deformación. Para ello
consideremos el tensor material de deformación E dado por sus
componentes:
E XX
E = E XY
E XZ
E XY
EYY
EYZ
E XZ E11
EYZ = E12
E ZZ E13
E12
E 22
E 23
E13
E 23
E 33
(2.39)
En consecuencia:
T ⋅ E ⋅ T = [T]
T
E11
⋅ [E]⋅ T = [1 0 0]⋅ E12
E13
E12
E 22
E 23
E13 1
E 23 ⋅ 0 = E11
E 33 0
(2.40)
El estiramiento en la dirección material X 1 puede obtenerse ahora
sustituyendo el valor T ⋅ E ⋅ T en la expresión del estiramiento (2.30),
obteniéndose: λ1 = 1 + 2 E11 . De modo análogo se pueden considerar
segmentos orientados en las direcciones X 2 ≡ Y y X 3 ≡ Z y obtener los
valores λ 2 y λ 3 , resultando:
λ 1 = 1 + 2 E11 = 1 + 2 E XX
⇒ ε X = λ X − 1 = 1 + 2 E XX − 1
λ 2 = 1 + 2 E 22 = 1 + 2 EYY
⇒ ε Y = λ Y − 1 = 1 + 2 EYY − 1
λ 3 = 1 + 2 E 33 = 1 + 2 E ZZ
⇒ ε Z = λ Z − 1 = 1 + 2 E ZZ − 1
(2.41)
Observación 2-9
En las componentes E XX , EYY y E ZZ (o E11 , E 22 y E 33 ) de la
diagonal principal del tensor E (denominadas deformaciones longitudinales)
está contenida la información sobre el estiramiento y los
alargamientos unitarios de segmentos diferenciales inicialmente (en la
configuración de referencia) orientados en direcciones X , Y y Z .
•
Si E XX = 0 ⇒ ε X = 0 ⇒ No hay alargamiento en la dirección X .
•
Si EYY = 0 ⇒ ε Y = 0 ⇒ No hay alargamiento en la dirección Y .
•
Si E ZZ = 0 ⇒ ε Z = 0 ⇒ No hay alargamiento en la dirección Z .
Consideremos ahora el ángulo entre los segmentos PQ (paralelo al eje X 1 ) y
PR , (paralelo al eje X 2 ) siendo Q y R , dos partículas del entorno diferencial
de P en la configuración de material y P ′, Q ′ y R ′ las respectivas posiciones
π
) entre
2
los segmentos en la configuración de referencia es posible conocer el ángulo θ
en la configuración espacial(ver Figura 2-8). Conocido el ángulo ( Θ =
en la configuración actual, utilizando la expresión (2.37) y teniendo en cuenta la
ortogonalidad de ambos ( T (1 ) ⋅ T (2 ) = 0 ) y las igualdades T (1 ) ⋅ E ⋅ T (1 ) = E11 ,
T (2 ) ⋅ E ⋅ T (2 ) = E 22 y T (1 ) ⋅ E ⋅ T (2 ) = E12 ,
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-62-320.jpg)



![43
2 Descripción de la deformación
N O T A
Para obtener la raíz
cuadrada de un tensor
se procede a
diagonalizar el tensor,
se obtiene la raíz
cuadrada de los
elementos de la
diagonal de la matriz de
componentes
diagonalizada y se
deshace la
diagonalización.
Observación 2-11
Un tensor ortogonal Q recibe el nombre de tensor de rotación y a la
aplicación y = Q ⋅ x se la denomina rotación. Una rotación tiene las
siguientes propiedades:
•
Cuando se aplica a cualquier vector x , el resultado es un vector
y = Q ⋅ x del mismo módulo:
y
2
= y ⋅ y = [y ] ⋅ [y ] = [Q ⋅ x ] ⋅ [Q ⋅ x] = x ⋅ Q T ⋅! ⋅ x = x ⋅ x = x
# Q
T
T
2
1
•
El resultado de multiplicar (aplicar) el tensor ortogonal Q a dos
vectores x (1) y x ( 2 ) con el mismo origen y que forman entre sí un
ángulo α , mantiene el mismo ángulo entre las imágenes
( y (1) = Q ⋅ x (1) e y ( 2 ) = Q ⋅ x ( 2 ) ):
y (1) ⋅ y ( 2 )
y (1) y ( 2 )
=
x (1) ⋅ QT ⋅ Q ⋅ x ( 2 )
y (1) y ( 2 )
=
x (1) ⋅ x ( 2 )
x (1) x ( 2 )
= cos α
En consecuencia la aplicación (rotación) y = Q ⋅ x mantiene los
ángulos y las distancias.
Considerando ahora el tensor gradiente de la deformación y la relación
fundamental (2.2) ( dx = F ⋅ dX ) y la descomposición polar (2.49) se obtiene:
N O T A C I O N
Se utiliza aquí la
notación ( ) ) para
indicar la composición
de dos aplicaciones
ξyϕ:
z = ϕ ) ξ (x)
deformació n
(% '%%
%
rotación
(
'
dx = F ⋅ dX = (V ⋅ Q ) ⋅ dX = V ⋅ ( Q ⋅ dX )
(2.50)
not
F(•) ≡ deformació n ) rotación (•)
(%rotación%
% '% %
%
deformació n
(
'
dx = F ⋅ dX = (Q ⋅ U ) ⋅ dX = Q ⋅ ( U ⋅ dX )
F(•) ≡ rotación ) deformació n (•)
Observación 2-12
Las ecuaciones (2.50) establecen que el movimiento relativo en el
entorno de una partícula durante el proceso de deformación
(caracterizado por el tensor F ) puede entenderse como la composición
de una rotación (caracterizada por el tensor de rotación Q , que
mantiene ángulos y distancias) y una deformación propiamente dicha (que
modifica ángulos y distancias) caracterizada por el tensor V (ver
Figura 2-11).
© Els autors, 2002; © Edicions UPC, 2002
(2.51)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-66-320.jpg)

![45
2 Descripción de la deformación
dx ( i ) = F ⋅ dX ( i )
(i )
(i )
dx j = F jk ⋅ dX k
R E C O R D A T O R I O
El volumen de un
paralelepípedo puede
calcularse como el
producto mixto
(a × b) ⋅ c de los
vectores-arista a , b y
c que concurren en
cualquiera de sus
vértices.
Por otra parte, el
producto mixto de tres
vectores es el
determinante de la
matriz constituida por
las componentes de
dichos vectores
ordenadas en filas
(2.52)
i, j, k ∈{1,2,3}
Los volúmenes asociados a la partícula en ambas configuraciones pueden
escribirse como:
(
)
dV0 = dX (1) × dX (2 ) ⋅ dX (3)
(
dVt = dx
(1)
× dx
(2 )
)⋅ dx
(3 )
(
(
dX 1(1) dX 21) dX 31)
(2 )
(
(
= det dX 1
dX 22 ) dX 32 ) = M
(
(
dX 1(3 ) dX 23 ) dX 33 )
#%%% %%%%
%
!
[M ]
dx (1)
=
dx (1)
(
dx 31)
dx 3
=m
(3 )
dx 3
#%%% %%%%
%
!
[m ]
1
(
det dx1 2 )
dx (3 )
1
M ij = dX (ji )
2
(
dx 22 )
(
dx 23 )
mij = dx (ji )
t
X 3 , x3
S′
F
t0
dV0
P´
S
dX
(1)
P
(2.53)
(2 )
dx (3 )
R´
dx(2 )
dx(1)
dX(3 )
ˆ
e3
R
dX(2 )
Q
ˆ
e1
Q´
dVt
ˆ
e2
X 2 , x2
X 1 , x1
Figura 2-12 – Variación de un elemento diferencial de volumen
Por otro lado, considerando las expresiones (2.52) y (2.53) puede escribirse:
T
mij = dx (ji ) = F jk dX k(i ) = F jk M ik = M ik Fkj
⇒ m = M ⋅ FT
(2.54)
y, en consecuencia:
N O T A
Se utilizan aquí las
expresiones:
A⋅B = A B y
AT = A
⇒
0
dVt = dV ( x( X, t ), t ) = F ( X, t ) dV ( X,0) = F t dV 0
dVt = m = M ⋅ F T = M F T = F M = F dV 0
$
dV
© Els autors, 2002; © Edicions UPC, 2002
dVt = F t dV0
(2.55)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-68-320.jpg)


![2 Descripción de la deformación
48
2.11.1 Tensores de deformación. Tensor de deformación
infinitesimal
Los tensores gradiente material y gradiente espacial de los desplazamientos
coinciden. En efecto, a la vista de la ecuación (2.60):
∂U i
x j = X j
∂u
= J ij ⇒ j = J
⇒ jij = i =
∂x j ∂X j
u i (x, t ) = U i ( X, t )
(2.62)
y el tensor material de deformación resulta ser:
(
) (
)
1
1
T
T
T
E = 2 J + J + J J ≅ 2 J + J
E = 1 ∂u i + ∂u j + ∂u k ∂u k ≅ 1 ∂u i + ∂u j
ij 2 ∂x j ∂xi
∂xi ∂x j 2 ∂x j ∂x i
# %
% !
1
(2.63)
donde se ha tenido en cuenta el carácter de infinitésimo de segundo orden del
término
∂u k ∂u k
. Operando similarmente con el tensor espacial de
∂xi ∂x j
deformación:
(
) (
) (
)
1
1
1
T
T
T
T
e = 2 j + j − j j ≅ 2 j + j = 2 J + J
∂u j ∂u k ∂u k 1 ∂u i ∂u j
1 ∂u
≅
eij = i +
+
−
2 ∂x j ∂x i
∂x i ∂x j 2 ∂x j ∂x i
# %
% !
1
N O T A C I Ó N
Se define el operador
gradiente simétrico ∇ s
mediante: ∇ s (•) =
1
[(•) ⊗ ∇ + ∇ ⊗ (•)]
2
(2.64)
Las ecuaciones (2.63) y (2.64) permiten definir el tensor de deformación infinitesimal
(o tensor de pequeñas deformaciones) ε :
(
)
not
1
T
s
ε = 2 J + J = ∇ u
deformació n →
∂u
ε ij = 1 ∂u i + j
infinitesi mal
2 ∂x j ∂x i
Tensor de
Observación 2-14
Bajo la hipótesis de deformación infinitesimal los tensores material y
espacial de deformación coinciden y colapsan en el tensor de deformación
infinitesimal.
E(x, t ) = e( x, t ) = ε (x, t )
© Els autors, 2002; © Edicions UPC, 2002
(2.65)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-71-320.jpg)




![53
2 Descripción de la deformación
en la configuración actual. Aplicando la ecuación (2.42) a dicho caso se
obtiene:
T (1) ⋅ [1 + 2ε ] ⋅ T ( 2 )
cos θ = cos( Θ + ∆θ) =
(2.74)
1)
(1
(2
(2
1 + #% %%) 1 + 2T%) %%)
2T (%⋅ ε ⋅ T!
# %⋅ ε ⋅ T!
1
1
donde T (1) y T ( 2 ) son los dos vectores unitarios en las direcciones de PQ y
PR cumpliéndose, por lo tanto, que T (1) ⋅ T ( 2 ) = T (1) T ( 2) cos Θ = cos Θ .
Considerando el carácter de infinitésimo de las componentes de ε y del propio
∆θ se cumple:
t
t0
T
Q
X3
(1)
F
t (1)
Q'
P
X3
Θ
P'
ˆ
e3
ˆ
e1
R
ˆ
e2
N O T A
Se consideran los
siguientes desarrollos
en serie de Taylor en un
entorno de x = 0 :
( )
cos x = 1 + O (x )
sin x = x + O x 2
2
T ( 2)
X2
X1
Θ + ∆θ
R'
t ( 2)
Figura 2-16
cos θ = cos( Θ + ∆θ ) = cos Θ ⋅ cos ∆θ − sinΘ ⋅ sin∆θ =
#!
# !
≈1
≈ ∆θ
= 'Θ
( cos%
%
= cos Θ − sinΘ ⋅ ∆θ =
T (1) ⋅ T ( 2) + 2T (1) ⋅ ε ⋅ T ( 2)
1+ % ⋅ ε ⋅ T
1 + % ε T%
#%T %%! #%T ⋅%⋅%!
≈1
≈1
⇒ sinΘ ⋅ ∆θ = −2T (1) ⋅ ε ⋅ T ( 2) ⇒
∆θ = −
(1)
(1)
(2)
( 2)
= cos Θ + 2T (1) ⋅ ε ⋅ T ( 2
2T (1) ⋅ ε ⋅ T ( 2 )
2t (1) ⋅ ε ⋅ t ( 2 )
=−
sin Θ
sinθ
(2.75)
(2.76)
donde se ha considerado que, debido al carácter infinitesimal de la
deformación, se cumple que T (1) ≈ t (1) , T ( 2 ) ≈ t ( 2 ) y Θ ≈ θ .
2.11.6 Descomposición polar
Para el caso general de deformación finita la descomposición polar del tensor
gradiente de la deformación F viene dada por la ecuación (2.49). Para el caso
de deformación infinitesimal, recordando la expresión (2.12) ( F = 1 + J ) y el
carácter de infinitésimo de las componentes del tensor J (ver la ecuación
(2.61)), el tensor U de la ecuación (2.49) puede escribirse como:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-76-320.jpg)
![2 Descripción de la deformación
54
R E C O R D A T O R I O
El desarrollo en serie
de Taylor del tensor
1 + x en un entorno
de x = 0 es:
1+ x =1+
( )
1
x+
2
+ O x2
R E C O R D A T O R I O
El desarrollo en serie
de Taylor del tensor
(1 + x) −1 en un
entorno de x = 0 es:
(1 + x) −1 = 1 − x +
( )
+ O x2
(1 + J T )⋅ (1 + J ) =
1
= 1 + J + J T + J T ! ≈ 1 + J + J T = 1 + (J + J T ) ⇒
⋅J
#
#!
2 !
#% %
x
J
ε
U = FT F =
U =1+ ε
(2.77)
y, de forma similar, debido al propio carácter infinitesimal de las componentes
de ε (ver Observación 2-16) resulta:
1
U −1 = (1 + ε ) −1 = 1 − ε = 1 − ( J + J T )
$
2 !
x
#% %
ε
(2.78)
con lo que el tensor de rotación Q de la ecuación (2.49) puede escribirse
como:
1
Q = F ⋅ U −1 = (1 + J ) ⋅ 1 − ( J + J T ) =
2
⇒
1
1
1
T
T
T
= 1 + J − ( J + J ) − J ⋅ ( J + J ) = 1 + (J − J )
2
2 %
2 !
#% %%
!
#% %
J
Ω
Q =1+ Ω
(2.79)
La ecuación (2.79) define el tensor infinitesimal de rotación Ω :
N O T A C I Ó N
Se define el operador
gradiente antisimétrico ∇ a
mediante: ∇ a (•) =
1
[(•) ⊗ ∇ − ∇ ⊗ (•)]
2
def
def 1
1
Ω = (J − J T ) = (u ⊗ ∇ − ∇ ⊗ u ) = ∇ a u
Tensor
2
2
infinitesi mal →
Ω = 1 ∂u i − ∂u j 1 i, j ∈{1,2,3}
de rotación
ij 2 ∂x
j ∂x i
(2.80)
Observación 2-19
El tensor Ω es un tensor antisimétrico. En efecto:
1 T
T 1
T T
Ω = (J − J ) = ( J − J ) = −Ω
2
2
Ω ji = −Ω ij i, j ∈{1, 2,3}
En consecuencia Ω tendrá nulos los términos de su diagonal
principal, y su matriz de componentes tendrá la estructura:
0
[Ω] = − Ω12
Ω 31
Ω12
0
− Ω 23
− Ω 31
Ω 23
0
En el contexto de pequeñas rotaciones, el tensor Ω es un tensor que caracteriza la
rotación ( Q = 1 + Ω ) y de ahí el nombre de tensor infinitesimal de rotación. Al
tratarse de un tensor antisimétrico queda definido mediante solamente tres
componentes distintas ( Ω 23 , Ω 31 , Ω12 ), de las que se puede extraer el
denominado vector infinitesimal de rotación θ :
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-77-320.jpg)
![2 Descripción de la deformación
N O T A C I Ó N
Se denota el operador
rotacional de (•)
mediante: ∇ × (•)
∂u 3 ∂u 2
−
θ1 − Ω 23
Vector
∂x 2 ∂x3 def
∂u 1
1 ∂u
infinitesi mal → θ ≡ θ 2 = − Ω 31 = 1 − 3 = ∇ × u
θ − Ω 2 ∂x 3 ∂x1 2
de rotación
12
∂u 2 ∂u1
3
∂x − ∂x
2
1
55
(2.81)
Las expresiones (2.12) , (2.65) y (2.79) permiten escribir:
F =1+ J =1+
1
1
( J + J T ) + (J − J T ) ⇒
2 ! #% %%
2 %
#% %
!
ε
Ω
F =1+ ε + Ω
Observación 2-20
Los resultados de aplicar escalarmente el tensor de rotación infinitesimal Ω y
de aplicar vectorialmente el vector de rotación infinitesimal θ a un vector
cualquiera r ≡ [r1 , r2 , r3 ]T (ver Figura 2-17) coinciden. En efecto:
0
Ω ⋅ r = − Ω12
Ω 31
ˆ
e1
θ
θ×r = 1
r1
not
ˆ
e2
θ2
r2
Ω12
0
− Ω 31 r1 Ω12 r2 − Ω 31 r3
Ω 23 r2 = − Ω12 r1 + Ω 23 r3
0 r3 Ω 31 r1 − Ω 23 r2
− Ω 23
ˆ
ˆ
e 3 e1
= − Ω
θ3
23
r3 r1
ˆ
e2
− Ω 31
r2
ˆ
e 3 Ω12 r2 − Ω 31 r3
− Ω12 = − Ω12 r1 + Ω 23 r3
r3 Ω 31 r1 − Ω 23 r2
En consecuencia, el vector Ω ⋅ r = θ × r tiene las siguientes
características:
•
Es ortogonal al vector r (puesto que es el resultado de un
producto vectorial en el que interviene r ).
•
Su módulo es infinitesimal (puesto que θ lo es).
•
El vector r + Ω ⋅ r = r + θ × r puede considerarse, salvo
infinitésimos de orden superior, el resultado de aplicar una
rotación θ al vector r .
θ
θ×r = Ω ⋅r
r
ˆ
e3
ˆ
e1
ˆ
e2
Figura 2-17
© Els autors, 2002; © Edicions UPC, 2002
(2.82)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-78-320.jpg)



![2 Descripción de la deformación
def
∂v (x, t )
l(x, t ) =
Tensor gradiente
∂x
espacial de la
→ l = v ⊗ ∇
velocidad
∂v
lij = i i, j ∈{1,2,3}
∂x j
59
(2.91)
2.13.2 Tensor velocidad de deformación y tensor spin
R E C O R D A T O R I O
Todo tensor de
segundo orden, a , se
puede descomponer en
la suma de su parte
simétrica ( sym(a) ) y
antisimétrica skew(a) )
de la forma:
a = sym(a) + skew(a)
a + aT
2
a − aT
skew(a) =
2
sym(a) =
Descomponiendo el tensor gradiente de la velocidad en su parte simétrica y
antisimétrica:
l=d+w
(2.92)
donde d es un tensor simétrico denominado tensor velocidad de deformación:
not
def
1
1
d = sym(l) = l + lT = (v ⊗ ∇ + ∇ ⊗ v ) = ∇ s v
2
2
Tensor
∂v j
1 ∂v
velocidad de → d ij = i +
i, j ∈{1,2,3}
2 ∂x j ∂x i
deformació n
d 11 d 12 d 31
[d] = d 12 d 22 d 23
d 31 d 23 d 33
(
)
(2.93)
y w es un tensor asimétrico denominado tensor velocidad de rotación o tensor spin
cuya expresión es:
not
def
1
1
T
a
w = skew (l) = 2 l − l = 2 (v ⊗ ∇ − ∇ ⊗ v ) = ∇ v
Tensor
∂v j
1 ∂v
velocidad de → w ij = i −
i, j ∈{1,2,3}
2 ∂x j ∂x i
rotación (spin)
w 12
− w 31
0
− w
[w ] =
0
w 23
12
w 31 − w 23
0
(
)
(2.94)
2.13.3 Interpretación física del tensor velocidad de deformación
Consideremos el segmento diferencial definido por las partículas P y Q de la
Figura 2-21 y la variación del cuadrado de su longitud a lo largo del tiempo:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-82-320.jpg)
![2 Descripción de la deformación
60
d 2 d
d
d
ds = (dx ⋅ dx ) = (dx ) ⋅ dx + dx ⋅ (dx ) =
dt
dt
dt
dt
dx
dx
= d ⋅ dx + dx ⋅ d = dv ⋅ dx + dx ⋅ dv
dt
dt
#!
#!
v
v
(2.95)
1
2
y utilizando las relaciones (2.90) ( dv = l ⋅ dx ) y (2.93) ( d = (l + l T ) ) se obtiene
de la ecuación (2.95):
d 2
ds = dx ⋅ lT ⋅ dx + dx ⋅ (l ⋅ dx ) = dx l T l ⋅ dx = 2dx ⋅ d ⋅ dx
#+
!
dt
2d
(
)
(2.96)
Considerando ahora la ecuación (2.20) ( ds 2 − dS 2 = 2 dX ⋅ E ⋅ dX ) derivándola
respecto al tiempo y teniendo en cuenta la ecuación (2.96):
(
)
d 2
d
ds (t ) =
ds 2 (t ) − dS 2 =
dt
dt
d
*
(2dX ⋅ E(X, t ) ⋅ dX ) = 2dX ⋅ dE ⋅ dX = 2dX ⋅ E ⋅ dX
dt
dt
$
*
E
2 dx ⋅ d ⋅ dx =
(2.97)
Sustituyendo ahora la ecuación (2.2) ( dx = F ⋅ dX ) en la (2.97) se obtiene:
N O T A
Se utiliza aquí el
siguiente teorema del
álgebra tensorial: dado
un tensor de segundo
orden A , si se verifica
que x ⋅ A ⋅ x = 0
para todo vector x ≠ 0
entonces A ≡ 0 .
[
]
]
T
*
dX ⋅ E ⋅ dX = dx ⋅ d ⋅ dx = [dx] [d ] ⋅ [dx] = dX ⋅ F T ⋅ d ⋅ F ⋅ dX
*
*
⇒ dX ⋅ F T ⋅ d ⋅ F − E ⋅ dX = 0 ∀dX ⇒ F T ⋅ d ⋅ F − E = 0 ⇒
[
]
[
(2.98)
*
E = FT ⋅ d ⋅ F
t + dt
t
x3, z
ds(t + dt )
t0
ds (t )
dS
Q
P′
P
e3
ˆ
e2
ˆ
Q′
x2, y
e1
ˆ
x1 , x
Figura 2-21
© Els autors, 2002; © Edicions UPC, 2002
P ′′
Q ′′](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-83-320.jpg)





![67
2 Descripción de la deformación
•
Operador nabla:
∇=
•
1 ∂
∂
∂
ˆ
ˆ
ˆ
er +
eθ + e z
∂r
∂z
r ∂θ
∂
∂r
1 ∂
⇒ ∇≡
r ∂θ
∂
∂z
(2.111)
Vector de desplazamientos u y vector velocidad v:
u r
ˆ
ˆ
ˆ
u = u r e r + u θ e θ + u z e z ⇒ u = u θ
u z
v r
ˆ
ˆ
ˆ
v = v r e r + v θ e θ + v z e z ⇒ u = v θ
v z
•
(2.112)
(2.113)
Tensor infinitesimal de deformación ε :
ε x′x′
1
T
ε = [u ⊗ ∇ ] + [u ⊗ ∇ ] ≡ ε x′y′
2
ε x′z ′
1 ∂uθ u r
∂u
+
ε rr = r
ε θθ =
∂r
r ∂θ
r
{
}
1 1 ∂u r ∂uθ uθ
+
−
ε rθ =
2 r ∂θ
∂r
r
1 ∂u
1 ∂u z
ε θz = θ +
2 ∂z r ∂θ
ε x′y′ ε x′z′ ε rr
ε y′y′ ε y′z ′ = ε rθ
ε y ′z ′ ε z′z ′ ε rz
ε zz =
ε rθ
εθθ
ε θz
ε rz
ε θz
ε zz
∂u z
∂z
(2.114)
1 ∂u
∂u
ε rz = r + z
2 ∂ z
∂r
En la Figura 2-27 se presentan las componentes de ε sobre el correspondiente
elemento diferencial.
•
Tensor velocidad de deformación d :
d x′x′
1
T
d = [v ⊗ ∇ ] + [v ⊗ ∇ ] ≡ d x′y′
2
d x′z ′
1 ∂vθ v r
∂v
+
d rr = r
dθθ =
∂r
r ∂θ
r
{
1 1 ∂v r ∂vθ
+
2 r ∂θ
∂r
1 ∂v
1 ∂v z
dθz = θ +
2 ∂z r ∂θ
d rθ =
}
−
vθ
r
d x′z ′ d rr
d y′y′ d y′z′ = d rθ
d y′z′ d z ′z ′ d rz
∂v
d zz = z
∂z
d x′y′
1 ∂v
∂v
d rz = r + z
2 ∂ z
∂r
© Els autors, 2002; © Edicions UPC, 2002
d rθ
dθθ
dθz
d rz
dθz
d zz
(2.115)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-90-320.jpg)

![69
2 Descripción de la deformación
•
Tensor infinitesimal de deformación ε :
ε x′x′ ε x′y′
1
T
ε = [u ⊗ ∇] + [u ⊗ ∇] ≡ ε x′y′ ε y′y′
2
ε x′z ′ ε y ′z ′
uθ u r
1∂
∂u
+
ε rr = r
ε θθ =
r ∂θ
r
∂r
∂u φ u θ
u
1
cot φ + r
+
ε φφ =
r sen θ ∂φ
r
r
{
}
ε x′z′ ε rr
ε y′z ′ = ε θr
ε z ′z ′ ε rφ
ε rθ
ε θθ
ε θφ
ε rφ
ε θφ
ε φφ
(2.120)
1 1 ∂u r ∂uφ uφ
1 1 ∂u r ∂u θ u θ
+
−
ε rφ =
r ∂θ + ∂r − r
2 r sen θ ∂φ
2
∂r
r
1 1 ∂u θ 1 ∂u φ u φ
cot φ
+
−
=
2 r sen θ ∂φ
r ∂θ
r
ε rθ =
ε θφ
En la Figura 2-29 se presentan las componentes de ε sobre el correspondiente
elemento diferencial.
• Tensor velocidad de deformación d :
d x′x′ d x′y′
1
T
d = [v ⊗ ∇] + [v ⊗ ∇ ] ≡ d x′y′ d y ′y′
2
d x′z ′ d y′z′
1 ∂vθ v r
∂v
d rr = r
d θθ =
+
r ∂θ
r
∂r
∂v φ vθ
v
1
cot φ + r
d φφ =
+
r sen θ ∂φ
r
r
{
}
d x′z ′ d rr
d y′z′ = d rθ
d z ′z ′ d rφ
d rθ
dθθ
d θφ
d rφ
dθφ
d φφ
(2.121)
1 1 ∂v r ∂v φ v φ
1 1 ∂v r ∂vθ vθ
d rφ =
+
−
r ∂θ + ∂r − r
2 r sen θ ∂φ
2
r
∂r
∂v φ v φ
1 1 ∂vθ 1
cot φ
+
−
=
2 r sen θ ∂φ
r ∂θ
r
d rθ =
dθφ
dφ
ε rr
z
ε rθ
ε rφ
ε φφ ε
φr
dθ
θ
φ
ε θθ
ε rθ
r
y
ε θφ
dV = r 2 sen θ dr dθ dφ
x
Figura 2-29 – Elemento diferencial en coordenadas esféricas
© Els autors, 2002; © Edicions UPC, 2002
ε rφ](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-92-320.jpg)



![3 Ecuaciones de compatibilidad
74
R E C O R D A T O R I O
Un teorema de la
geometría diferencial
establece que la
divergencia del
rotacional de cualquier
campo es nula:
Observación 3-3
Las 3 ecuaciones de compatibilidad (3.7) o (3.8) no son
independientes entre sí y puede establecerse una relación funcional
entre ellas. En efecto, aplicando la condición de que la divergencia del
rotacional de un campo vectorial es nula se obtiene:
∇ ⋅ (∇ × v ) = 0
∇ ⋅ [∇ × (•)] = 0
3.3 Condiciones de compatibilidad para las
deformaciones infinitesimales
Sea el campo de deformaciones infinitesimales ε( x, t ) de componentes:
ε ij =
1 ∂u i ∂u j
+
2 ∂x j
∂x i
1
= u i , j + u j ,i
2
(
)
i, j ∈ {1,2,3}
(3.9)
que puede ser descrito matricialmente mediante:
ε xx
[ε] = ε xy
ε xz
ε xy
ε yy
ε yz
∂u x
∂x
ε xz
×
ε yz =
ε zz
( simétrico)
1 ∂u x ∂u y
+
2 ∂y
∂x
∂u y
∂y
×
1 ∂u x ∂u z
+
2 ∂z
∂x
1 ∂u y ∂u z
+
2 ∂z
∂y
∂u z
∂z
(3.10)
Debido a la simetría de la ecuación (3.10) solamente se obtienen de la misma 6
ecuaciones distintas:
ε xx −
ε yy −
ε zz −
∂u x
=0
∂x
∂u y
∂y
=0
∂u z
=0
∂z
1 ∂u x ∂u y
=0
+
2 ∂y
∂x
∂u
1 ∂u
− x + z =0
2 ∂z
∂x
ε xy −
ε xz
ε yz −
(3.11)
1 ∂u y ∂u z
=0
+
2 ∂z
∂y
La ecuación (3.11) es un sistema de 6 E.D.P.’s con 3 incógnitas que son las
componentes del vector de desplazamientos u(x, t ) . En general, este problema
no tendrá solución salvo que se verifiquen ciertas condiciones de
compatibilidad. Para obtener dichas condiciones se derivan dos veces las
ecuaciones (3.11) respecto a las coordenadas espaciales y se obtiene:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-96-320.jpg)
















![91
4 Tensión
*
*
*
1 * *
1
ρ b h S + t * S − t (1) n 1 S − t (2 ) n 2 S − t (3 ) n 3 S = ρ * a * hS ⇒
3
3
*
*
*
1 * *
1
ρ b h + t * − t (1) n 1 − t (2 ) n 2 − t (3 ) n 3 = ρ * a * h
3
3
(4.11)
La expresión (4.11) es válida para cualquier tetraedro definido por un plano de
normal n situado a una distancia h del punto P . Si se considera ahora un
tetraedro infinitesimal, alrededor del punto P, haciendo tender a cero el valor
de PP´ = h pero manteniendo constante la orientación del plano
( n =constante), en la ecuación (4.11) se tiene que los dominios S i , S y
V colapsan en el punto P (ver Figura 4-7), con lo cual los puntos de los
respectivos dominios en los que se obtienen los valores medios tienden
también al punto P:
( )
[ ( )]
*
x * → x P ⇒ im t ( i ) x * = t ( i ) (P )
S
S
h→0
*
* *
x S → x P ⇒ im t x S , n = t (P, n )
i
i ∈{1,2,3}
i
h →0
(4.12)
y además
1
im ρ * b *
h→0 3
1
h = im ρ * a *
h→0 3
h = 0
(4.13)
Tomando ahora el límite de la ecuación (4.11) y substituyendo las (4.12) y
(4.13) la expresión (4.11), conduce a:
t (P, n ) − t (1)n1 − t (2 )n 2 − t (3 )n 3 = 0
⇒
t(P, n ) − t (i )n i = 0
(4.14)
El vector de tracciones t (1) puede escribirse en función de sus componentes
cartesianas, ver Figura 4-10, como:
t (1) = σ11 e1 + σ12 e 2 + σ13 e 3 = σ1i e i
ˆ
ˆ
ˆ
ˆ
x3
(4.15)
x3
σ13
t (1)
ˆ
e3
P
n
ˆ
e1
ˆ
e3
σ12
P
ˆ
e2
x2
σ11
ˆ
e1
ˆ
e2
x2
x1
x1
Figura 4-10 – Descomposición en componentes del vector de tracción t (1)
Operación que puede realizarse en forma análoga por los vectores de tracción
t ( 2 ) y t (3) (ver Figura 4-11):
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-113-320.jpg)





![97
4 Tensión
4.4.2 Ecuación de equilibrio en el contorno
La ecuación (4.20) puede ser ahora aplicada a los puntos del contorno
considerando que el vector de tracción es ahora conocido en dichos puntos
( t = t * ). El resultado es la denominada ecuación de equilibrio en el contorno:
Ecuación de equilibrio
en el contorno
n(x, t ) ⋅ σ(x, t ) = t * (x, t )
→
*
i, j ∈{1,2,3}
ni σ ij = t j
∀x ∈ ∂V
(4.29)
4.4.3 Simetría del tensor de tensiones de Cauchy
Mediante la aplicación del principio de balance del momento angular (ver
capítulo 5) puede demostrarse que el tensor de tensiones de Cauchy es simétrico:
σ = σT
σ ij = σ ji
(4.30)
i, j ∈ {1,2,3}
Observación 4-10
La simetría del tensor de tensiones permite que las ecuaciones de
Cauchy (4.28) y de equilibrio en el contorno (4.29) puedan escribirse,
respectivamente, como:
∇ ⋅ σ + ρ b = σ ⋅ ∇ + ρ b = ρ a
∂σ ji
∂σ ij
∂x + ρb j = ∂x + ρb j = ρa j
i
i
n ⋅ σ = σ ⋅ n = t * ( x, t )
*
ni σ ij = σ ji ni = t j (x, t )
∀x ∈ V
i, j ∈ { ,2,3}
1
∀x ∈ ∂V
∀x ∈ ∂V
i, j ∈{1,2,3}
Ejemplo 4-2 – Un medio continuo se mueve con un campo de velocidades cuya descripción
espacial es v( x, t ) = [z, x, y]T . El tensor de tensiones de Cauchy es de la forma:
y g(x, z, t) 0
σ = h(y) z(1 + t) 0
0
0
0
Determinar las funciones g, h y la forma espacial de las fuerzas de volumen b(x, t ) que
generan el movimiento.
Resolución:
Sabemos que el tensor de tensiones es simétrico, por lo tanto:
σ = σT
h( y ) = C
⇒ h ( y ) = g ( x , z, t ) ⇒
g ( x, z , t ) = C
donde C es una constante.
Además la divergencia del tensor resulta ser nula:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-119-320.jpg)
![98
4 Tensión
∂
∇⋅σ =
∂x
∂
∂y
y
∂
⋅ C
∂z
0
C
0
z (1 + t ) 0 = [0 0 0]
0
0
por lo tanto, la ecuación de Cauchy quedará:
∇ ⋅ σ + ρb = ρa
⇒ b =a
∇⋅σ=0
y aplicando la fórmula de la derivada material de la velocidad:
∂v
dv ∂v
=
+ v ⋅ ∇v
=0
∂t
dt ∂t
∂
0 1 0
∂x
∂ [z x y ] = 0 0 1
∇v = ∇ ⊗ v ≡
∂y
1 0 0
∂
∂z
0 1 0
a = v ⋅ ∇v = [z x y ] ⋅ 0 0 1 = [y z x ]
1 0 0
a=
⇒ b( x, t ) = a( x, t ) ≡ [y
z
x]
T
4.4.4 Diagonalización. Tensiones y direcciones principales
R E C O R D A T O R I O
Consideremos el tensor de tensiones σ . Al tratarse de un tensor de segundo
Un teorema del álgebra
orden simétrico diagonaliza en una base ortonormal y sus autovalores son
tensorial garantiza que
todo tensor de segundo reales. Consideremos, pues, su matriz de componentes en la base cartesiana
( x, y , z ) de trabajo (ver Figura 4-18):
orden simétrico
diagonaliza en una base
ortonormal y sus
σ x τ xy τ xz
valores propios son
(4.31)
σ ≡ τ xy σ y τ yz
reales.
τ xz τ yz σ z
( x, y,z)
En el sistema cartesiano ( x′, y ′, z′) en el que σ diagonaliza su matriz de
componentes será:
σ 1
σ=0
0
0
σ2
0
0
0
σ 3 ( x′ , y ′ , z ′ )
Definiciones:
Direcciones principales (de tensión): Las direcciones, asociadas a los ejes
( x′, y ′, z′) , en las que el tensor de tensiones diagonaliza.
Tensiones principales: Los valores propios del tensor de tensiones
(σ1 , σ 2 , σ 3 ) . En general, se supondrán ordenadas de la forma
{σ1 ≥ σ 2 ≥ σ 3 } .
© Els autors, 2002; © Edicions UPC, 2002
(4.32)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-120-320.jpg)
![99
4 Tensión
z´
σ3
σ2
y´
σ1
z
z
y´
x´
z´
γ
y
x´
x
β
α
y
x
Figura 4-18 – Diagonalización del tensor de tensiones
Para obtener las direcciones y tensiones principales, se debe plantear el
problema de autovalores asociado al tensor σ . Es decir, si λ y v son un
autovalor y su correspondiente autovector, respectivamente, se plantea:
σ ⋅ v = λv ⇒ [σ − λ 1] ⋅ v = 0
(4.33)
Para que la solución de este sistema sea no trivial (distinta de v = 0 ), el
determinante de (4.33) tiene que ser igual a cero, es decir:
det [σ − λ 1] = σ − λ 1 = 0
not
(4.34)
La ecuación (4.34) es una ecuación polinómica de tercer grado en λ . Siendo el
tensor σ simétrico, sus tres soluciones (λ 1 ≡ σ1 , λ 2 ≡ σ 2 , λ 3 ≡ σ 3 ) son reales.
Una vez hallado los autovalores y ordenados según el criterio σ1 ≥ σ 2 ≥ σ 3 , se
puede obtener el vector propio v (i ) para cada tensión σ i , resolviendo el
sistema (4.33):
[σ − σ i 1]⋅ v (i ) = 0
i ∈{1,2,3}
(4.35)
que proporciona una solución no trivial para los autovectores v (i ) , ortogonales
entre sí, la cual, una vez normalizada, define los tres elementos de la base
correspondientes a las tres direcciones principales.
Observación 4-11
De acuerdo con la interpretación gráfica de las componentes del
tensor de tensiones del apartado 4.3.3, sobre las caras del
paralelepípedo elemental asociado a las direcciones principales de
tensión no actúan más que unas tensiones normales que son,
precisamente, las tensiones principales (ver Figura 4-18).
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-121-320.jpg)






![106
4 Tensión
τ
(σ1 , τ1 )
n1 → (σ1 , τ1 )
n2 → (σ 2 , τ 2 )
(σ 2 , τ 2 )
. . .
(σ i , τ i )
ni → (σ i , τ i )
σ
Figura 4-24 – Lugar geométrico de los puntos (σ, τ)
4.6.2 Determinación de los círculos de Mohr
Consideremos el sistema de ejes cartesianos asociado a las direcciones
principales del tensor de tensiones. En esta base, las componentes del tensor
serán:
σ 1
σ≡0
0
0
σ2
0
0
0 con σ1 ≥ σ 2 ≥ σ 3
σ3
(4.52)
y el vector de tracción tendrá por componentes
σ1
t =σ⋅n = 0
0
0
σ2
0
0 n1 σ1 n1
0 n 2 = σ 2 n 2
σ 3 n3 σ 3 n 3
(4.53)
donde n1 , n 2 , n3 son las componentes de la normal n en la base asociada a las
direcciones principales. A la vista de la ecuación (4.53) la componente normal
de la tensión ( σ ), definida en la ecuación (4.49), y el módulo del vector de
tracción serán, respectivamente:
n1
2
2
t ⋅ n = [σ1 n1 , σ 2 n2 , σ 3 n3 ] n2 = σ1 n12 + σ 2 n 2 + σ 3 n3 = σ
n3
(4.54)
2
2
2 2
t = t ⋅ t = σ1 n12 + σ 2 n2 + σ 3 n3
2
(4.55)
2
También podemos relacionar los módulos del vector de tracción y de sus
componentes normal y tangencial mediante:
2
2
2 2
t = σ1 n12 + σ 2 n 2 + σ 3 n3 = σ 2 + τ 2
2
2
(4.56)
donde se ha tenido en cuenta la expresión (4.55). Finalmente, la condición de
normal unitaria de n se puede expresar en función de sus componentes como:
2
2
n = 1 ⇒ n12 + n2 + n3 = 1
(4.57)
Las ecuaciones (4.56), (4.54) y (4.57) se pueden sintetizar en la siguiente
ecuación matricial:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-128-320.jpg)
![107
4 Tensión
2
2
2
σ1 σ 2 σ 3 n1 σ 2 + τ 2
2
2
σ1 σ 2 σ 3 n 2 = σ ⇒ A ⋅ x = b
1
1
1 2 1
% #%% n3 $ #%
$ %
! %
x
A
(4.58)
b
El sistema (4.58) puede ser interpretado como un sistema lineal con:
a) Una matriz de coeficientes, A (σ) , definida por el tensor de tensiones en
el punto P (a través de las tensiones principales).
b) Un término independiente, b , definido por las coordenadas de un
cierto punto en el semiespacio σ − τ (representativas a su vez del estado
tensional sobre un cierto plano)
c) Un vector de incógnitas x que determina (mediante las componentes
de la normal n ) a qué plano corresponden los valores de σ y
τ elegidos.
Observación 4-18
En principio solo serán factibles las soluciones del sistema (4.58)
2
2 T
cuyas componentes x ≡ n12 , n 2 , n3 sean positivas y menores que 1
[
]
0 ≤ n12 ≤ 1
2
(ver ecuación (4.57)). ⇒ 0 ≤ n 2 ≤ 1
0 ≤ n 2 ≤ 1
3
Toda pareja (σ, τ) que conduzca a una solución x que cumpla este
requisito será considerado un punto factible del semiespacio σ − τ , el
cual es representativo del estado tensional sobre un plano que pasa por P. El
lugar geométrico de los puntos (σ, τ) factibles es la denominada región
factible del semiespacio σ − τ .
Consideremos ahora el objetivo de encontrar la región factible. Mediante
algunas operaciones algebraicas, el sistema (4.58) puede ser reescrito como:
A
2
2
n12 = 0
( I ) → σ + τ − σ 1 + σ 3 σ + σ 1σ 3 −
σ1 −σ3
A
2
2
2
n2 = 0
( II ) → σ + τ − σ 2 + σ 3 σ + σ 2σ 3 −
σ 2 −σ3
A
2
( III ) → σ 2 + τ 2 − σ 1 + σ 2 σ + σ 1σ 2 −
n3 = 0
σ1 − σ 2
(
(
)(
)
(
(
)
)
(
(
)(
A = σ1 − σ 2 σ 2 −σ 3 σ1 − σ 3
)
(
)
)
)
(4.59)
Consideremos ahora, por ejemplo, la ecuación (III) del sistema (4.59). Es fácil
comprobar que puede escribirse como:
(σ − a )2 + τ 2 = R 2
(
)
1
a = 2 σ 1 + σ 2
R = 1 σ − σ
1
2
4
(
(4.60)
) + (σ
2
2
)(
)
2
− σ 3 σ 1 − σ 3 n3
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-129-320.jpg)
![108
4 Tensión
que corresponde a la ecuación de una semicircunferencia en el semiespacio
σ − τ de centro C3 y radio R3 :
(
)
(
) + (σ
1
C 3 = σ 1 + σ 2 ;0
2
1
R3 =
σ1 −σ 2
4
2
2
)(
−σ 3 σ1 − σ 3
)
(4.61)
2
n3
2
Los distintos valores de n3 ∈ [0,1] determinarán un conjunto de
semicircunferencias concéntricas de centro C 3 y radios R3 ( n3 ) en el
semiespacio σ − τ , cuyos puntos ocuparán una cierta región del mismo. Dicha
región vendrá delimitada por los valores máximo y mínimo de R3 ( n3 ) .
Observando que el radical de la expresión de R3 en (4.61) es positivo, estos
2
2
valores se obtendrán para n3 = 0 (el radio mínimo) y n3 = 1 (el radio máximo)
2
n3
=1 ⇒
max
R3
(
)
(
)
1
σ1 − σ 2
2
1
= σ1 + σ 2 − σ 3
2
2
mín
n3 = 0 ⇒ R3 =
(4.62)
El dominio delimitado por ambas semicircunferencias definirá una primera
limitación del dominio factible al indicado en la Figura 4-25.
τ
max
R3
mín
R3
σ3
σ2
C3
σ1
σ
Figura 4-25 – Primera limitación del dominio factible
El proceso puede ser ahora repetido para las otras dos ecuaciones (I) y (II) de
(4.59) obteniéndose los siguientes resultados:
-
-
-
1
mín
1
R1 = (σ 2 − σ 3 )
2
Ecuación (I ) : C1 = (σ 2 + σ 3 ),0 ⇒
$%#% max
2
R1 = σ1 − a1
a1
max 1
1
R2 = (σ1 − σ 3 )
2
Ecuación (II ) : C 2 = (σ1 + σ 3 ),0 ⇒
2 # mín
$% %
R2 = σ 2 − a 2
a2
1
mín
1
R3 = (σ1 − σ 2 )
2
Ecuación (III ) : C 3 = (σ1 + σ 2 ),0 ⇒
$% % max
2 #
R3 = σ 3 − a3
a3
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-130-320.jpg)



![112
4 Tensión
Observación 4-19
Tanto la normal n como el vector tangente m y el ángulo θ en la
Figura 4-29 tienen asociados los siguientes sentidos:
•
Vector normal n : hacia el exterior del plano (respecto a la posición
del punto P)
•
Vector tangente m : tiende a girar en sentido horario respecto al punto
P.
•
Angulo θ : positivo en el sentido antihorario.
Sea σ el tensor de tensiones en el punto con componentes en la base
cartesiana:
σx
σ=
τ xy
τ xy
σy
(4.67)
Utilizando la expresión (4.66), el vector de tracción en el punto sobre el plano
considerado es:
σx
t = σ⋅n =
τ xy
τ xy cos θ σ x cos θ + τ xy sinθ
=
σ y sinθ τ xy cos θ + σ y sinθ
(4.68)
Se definen la tension normal σ θ y la tensión tangencial τ θ , sobre el plano de inclinación
θ (ver Figura 4-29) como:
cos θ
σ θ = t ⋅ n = σ x cos θ + τ xy sinθ ; τ xy cos θ + σ y sinθ
sinθ
[
]
(4.69)
σ θ = σ x cos θ + τ xy 2sinθ cos θ + σ y sin θ
2
2
sinθ
τ θ = t ⋅ m = σ x cos θ + τ xy sinθ ; τ xy cos θ + σ y sinθ
− cos θ
[
]
[
τ θ = σ x sinθ cos θ − σ y sinθ cos θ + τ xy sin 2 θ − cos 2 θ
(4.70)
]
que pueden reescribirse como:
N O T A
Se utilizan aquí las
siguientes relaciones
trigonométricas:
sin(2θ) = 2 sinθ cos θ
1 + cos(2θ)
cos 2 θ =
2
1 − cos(2θ)
2
sin θ =
2
σx + σ y σx − σy
+
cos (2θ) + τ xy sin(2θ)
σ θ =
2
2
τ = σ x − σ y sin(2θ) − τ cos (2θ)
xy
θ
2
(4.71)
4.7.2 Problema directo: diagonalización del tensor de tensiones.
El problema directo consiste en, conocidas las componentes del tensor de
tensiones (4.67) en un cierto sistema de ejes x − y , obtener las direcciones y
tensiones principales (ver Figura 4-30).
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-134-320.jpg)

![114
4 Tensión
2
σ = σ x + σ y + σ x − σ y + τ 2
xy
1
2
2
σα →
2
σx + σy
σx − σy
+ τ xy 2
σ 2 =
−
2
2
(4.74)
4.7.3 Problema inverso
El problema consiste en, dadas las direcciones y tensiones principales σ1 y σ 2
en el plano de análisis, obtener las tensiones sobre cualquier plano,
caracterizado por el ángulo β que forma su normal con la dirección principal
correspondiente a σ1 . Como caso particular puede obtenerse las componentes del
tensor de tensiones sobre el rectángulo elemental asociado al sistema de ejes
x − y (ver Figura 4-30).
y'
x'
σ2
σβ
β
σ1
σ1
τβ
Figura 4-31- Problema inverso
Considerando ahora el sistema cartesiano x ′ − y ′ , asociado a las direcciones
principales (ver Figura 4-31), y aplicando la ecuación (4.71) con σ x′ = σ1 , σ y′′ = σ 2 ,
τ x′y′ = 0 y θ ≡ β , se obtiene:
σ1 + σ 2 σ1 − σ 2
+
cos(2β )
2
2
σ − σ2
τβ = 1
sin(2β)
2
σβ =
(4.75)
4.7.4 Círculo de Mohr para estados planos (en dos dimensiones)
Consideremos ahora todos los posible planos que pasen por el punto P y los
valores de las tensiones normal y tangencial, σ θ y τ θ , definidos en la ecuación
(4.71) para todos los posible valores de θ ∈ [0,2π] . Podemos caracterizar ahora
el estado tensional en el punto sobre un plano de inclinación θ mediante la
pareja:
σ ∈ R
(σ = σ θ , τ = τ θ ) →
τ ∈ R
© Els autors, 2002; © Edicions UPC, 2002
(4.76)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-136-320.jpg)










![126
5 Ecuaciones de conservación-balance
existirá una cierta cantidad de la propiedad A que, asociada al transporte de
masa, atraviesa la superficie de control S por unidad de tiempo.
t = t0
X 3 , x3
F
t
dm
dm
P
P′
ˆ
e3
ˆ
e2
X 2 , x2
ˆ
e1
X 1 , x1
Figura 5-1
Definición:
Flujo convectivo: Se define como flujo convectivo (o flujo por transporte
de masa) de una propiedad genérica A a través de una superficie de
control S a la cantidad de A que, debido al transporte de masa,
atraviesa la superficie S por unidad de tiempo.
Flujo convectivo de A not
cantidad de A que atraviesa S
= ΦS =
a través de S
unidad de tiempo
v
n
x3
ˆ
e3
S
ˆ
e2
x2
ˆ
e1
x1
Figura 5-2 – Flujo convectivo a través de una superficie de control
Para obtener la expresión matemática del flujo convectivo de A a través de la
superficie S , consideraremos un elemento diferencial de superficie dS y el
vector de velocidades v de las partículas que en el instante t están sobre
dS (ver Figura 5-3). En un diferencial de tiempo dt , éstas partículas habrán
recorrido un trayecto dx = vdt , de forma tal que en el instante de tiempo t + dt
ocuparán una nueva posición en el espacio. Si se consideran todas las partículas
que han atravesado dS en el intervalo [t , t + dt ], éstas ocuparán el cilindro
generado al trasladar la base dS sobre la generatriz dx = vdt , cuyo volumen
viene dado por:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-147-320.jpg)
![5 Ecuaciones de conservación-balance
127
dx = v ⋅ dt
v
dh = dx ⋅ n = v ⋅ n dt
n
dS
Figura 5-3
dV = dS ⋅ dh = v ⋅ n dt dS
(5.1)
Conociendo el volumen ( dV ) de partículas que atraviesan dS en el intervalo
de tiempo [t , t + dt ], podemos obtener la masa que atraviesa dS en el intervalo
de tiempo [t , t + dt ], multiplicando (5.1) por la densidad:
dm = ρ dV = ρ v ⋅ n dt dS
(5.2)
y, finalmente, puede obtenerse la cantidad de A que atraviesa dS en el
intervalo de tiempo [t, t + dt ] , multiplicando (5.2) por la función Ψ (cantidad de
A por unidad de masa):
Ψ dm = ρ Ψ v ⋅ n dt dS
(5.3)
Dividiendo por dt la expresión (5.3), obtendremos la cantidad de la propiedad
que atraviesa el diferencial de superficie de control dS por unidad de tiempo:
d ΦS =
Ψ dm
= ρ Ψ v ⋅ n dS
dt
(5.4)
Integrando la ecuación (5.4) sobre la superficie de control S , tendremos la
cantidad de la propiedad A que atraviesa la totalidad de la superficie S por
unidad de tiempo, es decir, el flujo convectivo de la propiedad A a través de S :
Flujo convectivo de
→ Φ S = ∫ ρΨ v ⋅ n dS
A a través de S
S
(5.5)
Ejemplo 5-1 – Calcular la magnitud Ψ y el correspondiente flujo convectivo Φ S para las
siguientes propiedades: a) el volumen, b) la masa, c) la cantidad de movimiento, d) la energía
cinética.
1) Sea la propiedad A el volumen de las partículas. Entonces Ψ será
volumen por unidad de masa (el inverso de la densidad) y:
A ≡V,
Ψ=
1
,
ρ
Φ S = ∫ v ⋅ n dS = Caudal
S
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-148-320.jpg)



![131
5 Ecuaciones de conservación-balance
Q(t ) = ∫ µ(x, t ) dV
V
(5.9)
Q(t + ∆t ) = ∫ µ(x, t + ∆t ) dV
V
y utilizando el concepto de derivada temporal de Q (t ) y las ecuaciones (5.9)
N O T A
Nótese que el dominio
de integración no varía
al considerar que el
volumen V es un
volumen de control, y
por lo tanto fijo en el
espacio.
Q′(t ) =
∂
1
∫ µ(x, t ) dV = ∆lím0 ∆t [Q(t + ∆t ) − Q(t )]
t→
∂t V
1
∫ µ(x, t + ∆t ) dV − ∫ µ(x, t ) dV =
∆t → 0 ∆t
V
V
= lím
µ(x, t + ∆t ) − µ (x, t )
∂µ(x, t )
= ∫ lím
dV = ∫
dV
∆t → 0
V $!!! #∆t !!!
V $#
! !
!∂t!
∂µ (x,t )
Derivada
local de µ
∂t
(5.10)
de donde se obtiene la expresión matemática de la derivada local de una
integral de volumen:
Derivada local de una
∂
∂µ(x, t )
µ(x, t ) dV =
dV
→
integral de volumen
∂t V
∂t
V
∫
∫
(5.11)
5.3.2 Derivada material
Definición:
Derivada material de una integral de volumen. La derivada material de la
integral de volumen Q (t ) = ∫ µ(x, t ) dV es la derivada temporal de
Vt
Q (t ) cuando el volumen Vt es un volumen material (móvil en el
espacio), ver Figura 5-5. Se utilizará la notación:
Derivada
material
not
=
d
∫ µ(x, t ) dV
dt V
t
El contenido Q de una propiedad A en el volumen material en los instantes
de tiempo t y t + ∆t será:
Q(t ) =
∫ µ(x, t ) dV
Vt
Q(t + ∆t ) =
∫ µ(x, t + ∆t ) dV
Vt + ∆t
© Els autors, 2002; © Edicions UPC, 2002
(5.12)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-152-320.jpg)
![132
5 Ecuaciones de conservación-balance
t + ∆t
t
t0
dVt + ∆t
dVt
dV0
X 3 , x3
Q (t )
Q(t + ∆t )
ˆ
e3
V0
ˆ
e2
X 2 , x2
ˆ
e1
X 1 , x1
N O T A
V t + ∆t
Vt ≡ V
Figura 5-6 – Derivada material de una integral de volumen
La derivada material se expresa matemáticamente como:
Nótese que ahora los
dominios de
integración son
diferentes en los
instantes t y t + ∆t .
Q ′(t ) =
d
µ(x, t ) dV
dt V
∫
t
1
= lím
∆t →0 ∆t
= lím
∆t →0
Vt ≡V
Q(t + ∆t ) − Q(t )
=
∆t
µ(x, t + ∆t ) dV − µ(x, t ) dV
V
∫
(5.13)
∫
Vt + ∆t
t
El siguiente paso consiste en hacer unos cambios de variable, adecuados para
cada una de las dos integrales de la ecuación (5.13), que conduzcan al mismo
dominio de integración. Este cambio de variable viene dado por las ecuaciones
de movimiento x = ϕ(X, t ) , particularizadas para los instantes t y t + ∆t :
x t = ϕ(X, t )
→ (dx1 dx 2 dx 3 ) t = F(X, t ) ( dX 1 dX 2 dX 3 )
$! #!!
!
$! #!!
!
dVt
dV0
x
dx )
dX
3 )
t + ∆t = ϕ(X, t + ∆t ) → ( dx1 dx #!! = F (X, t + ∆t ) ( dX 1! 2 dX
$!!2 3 t + ∆t
$! #!!
dVt + ∆t
dV0
(5.14)
donde se ha tenido en cuenta la identidad dVt = F(X, t ) dV0 . Los cambios de
variable de la ecuación (5.14) introducidos en la ecuación (5.13) conducen a:
d
µ(x, t ) dV =
dt V
∫
t
1
µ(x(X, t + ∆t ), t + ∆t ) F(X, t + ∆t ) dV0 − µ(x(X, t ), t ) F (X, t ) dV0 =
!
$! !
#
∆t → 0 ∆t $!! #!!!
V0
µ (X,t )
µ (X,t + ∆t )
V0
(5.15)
µ (X, t + ∆t ) F(X, t + ∆t ) − µ (X, t ) F (X, t )
d
= lím
[µ F ] dV0
dV0 =
∆t → 0
dt
#∆t
V0 $!!!!!!!! !!!!!!!!
V0
∂
µ (X, t ) F(X, t ) = d µ (x,t ) F (x,t )
dt
∂t
∫
= lím
∫
∫
∫
[
]
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-153-320.jpg)



 dV0 = 0 ∀∆V0 ⊂ V0 ∀t
∂t
F dt
V
∫ dt
Vt
= F ⋅∇ ⋅ v
=
∫
Vt
(5.27)
0
donde ahora el recinto de integración es el volumen de la configuración de
referencia V0 . Puesto que la ecuación (5.27) debe cumplirse para todas y cada
una de las partes ∆V0 de V0 , puede llevarse a cabo un proceso de localización
que conduce a:
R E C O R D A T O R I O
Se utiliza
igualdad,
aquí
F( X,0) = 1 ⇒
F 0 =1
la
∂
[ρ F ](X, t ) = 0
∂t
∀X ∈ V 0 ∀t ⇒ ρ F ( X, t ) = ρ F ( X) ∀t
⇒
⇒ ρ(X,0 ) F (X,0 ) = ρ(X, t ) F (X, t ) ⇒ ρ 0 F 0 = ρ t F t
$! #!!
!
$! #!!
!
%
not
not
=1
= ρ0 F 0
= ρt F t
Forma local material
del principio de la
→ ρ 0 ( X) = ρ t ( X) F t ( X)
conservaci ón de la masa.
∀X ∈V0 ∀t
(5.28)
(5.29)
5.5 Ecuación de balance. Teorema del
transporte de Reynolds
Sea A una cierta propiedad genérica (escalar, vectorial o tensorial) de un
medio continuo, y sea ψ(x, t ) la cantidad de esta propiedad A por unidad de
masa. Por consiguiente, ρψ(x, t ) es la cantidad de la propiedad por unidad de
volumen.
5.5.1 Lema de Reynolds
Consideremos un volumen material arbitrario de medio continuo que en el
instante t ocupa en el espacio un volumen Vt ≡ V . La cantidad de la propiedad
genérica A en el volumen material Vt en el instante t será:
Q (t ) =
∫ ρ ψ dV
Vt ≡V
(5.30)
La variación a lo largo del tiempo del contenido de la propiedad A en el
volumen material Vt vendrá dada por la derivada temporal de Q (t ) , que
utilizando la expresión (5.17) de la derivada material de una integral de
volumen (con µ = ρψ) será:
Q ′(t ) =
d
d (ρψ )
ρψ
∫ $ dV = ∫ dt + ρψ∇ ⋅ v dV
#
dt V ≡V µ
V
t
© Els autors, 2002; © Edicions UPC, 2002
(5.31)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-157-320.jpg)
![5 Ecuaciones de conservación-balance
137
Utilizando la expresión para la derivada material de un producto de funciones,
agrupando términos y utilizando la ecuación de continuidad (5.24):
d
ρψdV =
dt V ∫ V
≡
t
dψ
∫ ρ dt
+ψ
V
dρ
+ ρψ∇ ⋅ v dV = ∫
dt
V
Lema de Reynolds :→
ψ
[ ρ ddt + ψ ddtρ + ρ∇ ⋅ v ]dV ⇒
$! #!!
!
=0 ( Ec. de
continuida d)
d
dψ
∫ ρψ dV = ∫ ρ dt dV
dt V ≡V
V
(5.32)
(5.33)
t
5.5.2 Teorema de Reynolds
Consideremos el volumen arbitrario V , fijo en el espacio, de la Figura 5-8. La
cantidad de la propiedad A en este volumen de control será:
Q (t ) = ∫ ρψ dV
(5.34)
V
La variación de la cantidad de la propiedad A en el volumen material Vt , que
de forma instantánea coincide en el instante t con el volumen de control
V ( Vt ≡ V ) , vendrá dada por la derivada material de la expresión (5.19) (con
µ = ρψ) y la ecuación (5.11):
∂(ρ ψ )
d
∫ ρψ dV = ∫ ∂t dV + ∫ ∇ ⋅ (ρ ψ v) dV
dt V ≡V
V
V
(5.35)
t
Utilizando el lema de Reynolds (5.33) y el teorema de la divergencia en la
expresión (5.35) se obtiene:
d
ρψ dV
dt V ∫V
≡
t
Lema
de
Reynolds
=
∫ρ
V
∂(ρψ )
dψ
dV = ∫
dV + ∫ ∇ ⋅ ( ρ ψ v) dV =
∂t
dt
V
V
Teorema
de la
divergenci a
=
∫
V
(5.36)
∂(ρψ )
dV + ∫ ρ ψ v ⋅ n dS
∂t
∂V
expresión (5.36) que puede ser reescrita como:
Teorema del Transpor te de Reynolds:
∂
dψ
ρ ψ dV
=
ρ
−
ρ ψ v ⋅ n dV
dV
∂t V
dt
V! #!!!
∂V!!#!!
$!! #!!!
!
$! !
$
Variación por unidad
Variación debida al
Variación debida al
de tiempo del contenido cambio del contenido flujo convectivo neto
de la propiedad A en el de la propiedad A en de A , saliente por el
las partículas del
contorno ∂V
volumen de control V .
interior de V
∫
∫
∫
© Els autors, 2002; © Edicions UPC, 2002
(5.37)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-158-320.jpg)







![145
5 Ecuaciones de conservación-balance
Puesto que el momento resultante de las fuerzas que actúan sobre el medio
continuo (momento de las fuerzas másicas y momento de las fuerzas de
superficie) tiene la expresión (ver Figura 5-11):
∫
M O (t ) = r × ρ b dV +
∫ r × t dS
∂V
V
(5.56)
el principio de balance del momento de la cantidad de movimiento queda:
Forma global espacial del
d
r × ρ v dV = ∫ r × ρ b dV + ∫ r × t dS
principio de balance del →
dt V ∫V
V
≡
∂V
momento angular
(5.57)
t
5.8.2 Forma local espacial del principio de balance del momento angular
Para obtener la forma local espacial de la ecuación de balance se procede como
sigue; teniendo en cuenta el Lema de Reynolds en la ecuación (5.57):
d
d
∫ r × ρv dV = dt ∫ ρ(r × v) dV =
dt V ≡V
V ≡V
t
t
d
dr
dv
dv
= ∫ ρ (r × v )dV = ∫ ρ ( × v) dV + ∫ ρ (r × ) dV = ∫ r × ρ
dV
dt
dt
dt
dt
V
V %
V
V
v
$ #!
!
=0
(5.58)
y desarrollando el último término de la ecuación (5.57):
n⋅σ
T
r × t dS = ∫ r × n ⋅ σ dS = ∫ r × [n ⋅ σ ] dS = ∫ (r × σ T ) ⋅ n dS =
∫
∂V
∂V
∂V
∂V
Teorema
Diverg.
T
=
∫ (r × σ ) ⋅ ∇ dV
V
σΤkr
∂
simb
∂
T
=
(r × σ ) ⋅ ∇ i = (eijk x j σ rk )
(eijk x j σ rk ) =
∂x r ∂x r
∂x j
∂σ rk
σ rk + eijk x j
= eijk σ jk + (r × ∇ ⋅ σ ) i ∈{1,2,3}
eijk
$#
∂x r
∂x r
%
$! !
#
mi
δ jr
[r×∇⋅σ] i
[
(5.59)
]
(5.60)
Substituyendo ahora la ecuación (5.60) en la (5.59):
r × t dS = m dV + (r × ∇ ⋅ σ ) dV
⇒ ∂V
V
V
mi = eijk σ jk
i, j , k ∈ {1,2,3}
∫
∫
∫
(5.61)
y substituyendo finalmente las ecuaciones (5.58) y (5.61) en la ecuación (5.57):
∫ r × ρ dt dV = ∫ r × ρb dV + ∫ m dV + ∫ (r × ∇ ⋅ σ )dV
dv
V
V
V
V
Reordenando términos en la ecuación (5.62), se obtiene:
© Els autors, 2002; © Edicions UPC, 2002
(5.62)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-166-320.jpg)







![153
5 Ecuaciones de conservación-balance
φ
B′
B
φ B = φ A + ∫ δφ
A
A
µ1
∫Γ δφ ≠ ∫Γ δφ
1
B
2
µ2
Γ1
A
B
Γ2
Figura 5-18. Función no unívoca de las variables termodinámicas µ 1 ,µ 2
Sin embargo la ecuación (5.80) no garantiza que el resultado φ B sea
independiente del camino (proceso termodinámico) seguido. En términos
matemáticos, no garantiza que la función φ : R n → R definida mediante (5.80)
sea unívoca (ver Figura 5-18) y que, por lo tanto, exista una sola imagen
φ(µ1 ,...., µ n ) para cada punto del espacio termodinámico (ver Figura 5-18).
Observación 5-10
Para que una función φ(µ1 ,.....µ n ) , descrita implícitamente mediante
una forma diferencial δφ , sea una función de estado (es decir unívoca),
dicha forma diferencial tiene que ser una diferencial exacta δφ = dφ . En
otras palabras la forma diferencial δφ tiene que ser integrable.
La condición necesaria y suficiente para que una forma diferencial
como la (5.79) sea una diferencial exacta es la igualdad de derivadas
cruzadas:
δφ = f 1 (µ1 , ' , µ n )dµ 1 + ' + f n (µ 1 , ' , µ n ) dµ n
∂f i (µ1 , ' , µ n ) ∂f j (µ1 , ' , µ n )
⇔ δφ = dφ
=
∀i, j ∈{1,...n}
∂µ j
∂µ i
Si la forma diferencial (5.79) es una diferencial exacta, la ecuación (5.80) queda:
φ B = φ A + ∫ dφ =φ A + [∆φ]A
B
B
A
(5.81)
y el valor φ B es independiente del camino de integración. Diremos entonces
que la función φ es una función de estado que depende únicamente de los valores de las
variables de estado y no del proceso termodinámico.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-174-320.jpg)
![154
5 Ecuaciones de conservación-balance
Observación 5-11
Si φ es una función de estado, entonces δφ es una diferencial exacta
y la integral a lo largo de todo ciclo cerrado de la diferencial δφ será
nula:
∆ ]A
∫A δφ = ∫ dφ = [$φ = 0
#
A
A
0
Ejemplo 5-3 – Determinar si la función φ(µ1 , µ 2 ) definida a partir de la forma
diferencial δφ = 4µ 2 dµ 1 + µ1 dµ 2 puede ser una función de estado.
Resolución:
De acuerdo con la ecuación (5.79):
∂f 1
= 4
f1 ≡ 4µ 2 ∂µ 2
∂f1
∂f
≠ 2
⇒
⇒ ∂f
f 2 ≡ µ1
2
= 1 ∂µ 2 ∂µ 1
∂µ1
luego δφ no es una diferencial exacta (ver Observación 5-10) y φ no es una
función de estado.
5.10.2 Primer principio de la termodinámica
La experiencia demuestra que la potencia mecánica (5.74) no es una diferencial
exacta y que, por lo tanto, el trabajo mecánico desarrollado por el sistema en
un ciclo cerrado no es igual a cero. Lo mismo ocurre con la potencia calorífica
(5.77).
δφ1 = Pe dt ⇒ ∫ Pe dt ≠ 0
δφ 2 = Qe dt ⇒ ∫ Qe dt ≠ 0
(5.82)
Sin embargo, existe evidencia experimental de que la suma de la potencia
mecánica más la potencia calorífica, es decir la potencia total entrante en el
sistema (5.78) (ver Figura 5-19), es efectivamente una diferencial exacta y que,
por lo tanto, puede definirse a partir de ella una función de estado E que
corresponderá al concepto de energía:
t
Pe dt + Qe dt = dE ⇒ E (t ) = ∫ ( Pe + Qe ) dt + ctte.
t0
© Els autors, 2002; © Edicions UPC, 2002
(5.83)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-175-320.jpg)










![5 Ecuaciones de conservación-balance
165
5.12.5 Formas alternativas del segundo principio de la termodinámica
En mecánica de medios continuos suelen utilizarse expresiones alternativas de
la ecuación de Clausius-Plank (5.112) combinándola con la forma local de la
ecuación de balance de la energía (5.90).
•
Ecuación de Clausius-Plank en función de la energía interna específica.
Una forma usual de expresar la ecuación de Clausius-Plank es hacerlo en
función de la energía interna específica u ( x, t ) de la ecuación (5.85). Esta
expresión se obtiene utilizando la forma local espacial de la ecuación de
balance de energía (5.90):
ρ
du not
= ρ u = σ : d + ρ r −∇ ⋅q ⇒
(
dt
(
ρ r − ∇ ⋅q = ρ u − σ :d
(5.114)
y sustituyéndola en la ecuación de Clausius-Plank (5.112):
ρ θ slocal = ρθs − [ρ r − ∇ ⋅ q ] = ρθ s − ρ u + σ : d ≥ 0
(i
(
(
(
Ecuación de Clausius - Plank
en función de la
energía interna
•
(
(
→ − ρ(u − θ s ) + σ : d ≥ 0
(5.115)
(5.116)
Ecuación de Clausius-Plank en función de la energía libre de Helmholtz.
Otra posibilidad es expresar la ecuación de Clausius-Plank en función de la
energía libre (específica) de Helmholtz ψ( x, t ) que se define en función de la
energía interna, de la entropía y de la temperatura como:
def
(5.117)
ψ = u − sθ
Derivando respecto al tiempo la ecuación (5.117), se obtiene
[
(
( ( ( (
(
( (
ψ = u − sθ − sθ ⇒ u − θs = ψ + sθ
]
(5.118)
y substituyendo la ecuación (5.118) en la (5.116), se obtiene la ecuación de
Clausius-Plank en función de la energía libre de Helmholtz:
(
(
(i
(
(
ρ θ s local = −ρ(u − θ s ) + σ : d = −ρ(ψ + sθ) + σ : d ≥ 0
(5.119)
Ecuación de Clausius - Plank
(
(
en función de la
→ − ρ(ψ + s θ) + σ : d ≥ 0 ≥ 0
energía libre
(5.120)
(
Para el caso de deformación infinitesimal se tiene que d = ε (ver capítulo 2,
Observación 2-22) y substituyendo en la ecuación (5.120) se obtiene:
Ecuación de
(
(
(
Clausius - Plank
→ − ρ( ψ + s θ) + σ : ε ≥ 0
(Deformaci ón infinitesi mal)
© Els autors, 2002; © Edicions UPC, 2002
(5.121)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-186-320.jpg)








![174
6 Elasticidad lineal
6.3 Isotropía – Constantes de Lamé – Ley de
Hooke para elasticidad lineal isótropa
Definición:
Material isótropo: Aquel que tiene las mismas propiedades en todas las
direcciones.
N O T A
Un tensor es isotrópo si
mantiene sus
componentes en
cualquier sistema de
coordenadas cartesiano.
La expresión más
general de un tensor
isotrópo de cuarto orden es :
C = λ1 ⊗ 1 + 2µI
∀λ y µ
R E C O R D A T O R I O
El tensor simétrico
unitario de cuarto
orden I (isotrópo) se
define mediante sus
componentes:
[I ]ijkl = 1 [δik δ jl + δil δ jk ]
2
Para el caso de un material elástico lineal, las propiedades elásticas están
contenidas en el tensor C de propiedades elásticas de las ecuaciones (6.6) o
(6.7). En consecuencia, las componentes de dicho tensor deben ser
independientes de la orientación del sistema cartesiano en el que se trabaje. Si
consideramos, por ejemplo, los sistemas {x1 , x2 , x3} y {x1´, x2 ´, x3´} de la Figura
6-2, la ecuación constitutiva para los dos sistemas se escribe:
{x1 , x 2 , x 3 } ⇒ [σ] = [C ]: [ε ]
(6.17)
{x1´, x 2 ´, x 3 ´} ⇒ [σ]´ = [C ]´ : [ε ]´
y, para el caso de material isótopo, las componentes de C en ambos sistemas
deben ser las mismas ( ⇒ [C ] = [C]´ ). En consecuencia, la anterior definición, de
carácter físico, de isotropía se traduce en el carácter isotrópo, en el sentido
matemático, del tensor de constantes elásticas C :
C = λ1 ⊗ 1 + 2µI
Tensor de
constantes →
C = λδ δ + µ[δ δ + δ δ ] i, j, k .l ∈{1, 2,3}
elásticas
ij kl
ik jl
il jk
ijkl
(6.18)
Donde λ, µ son conocidas como las constantes de Lamé, que caracterizan el
comportamiento elástico del material y que deben ser obtenidas
experimentalmente.
x3
x2 ´
x3 ´
x1 ´
x2
x1
Figura 6-2
Observación 6-5
La condición de isotropía reduce el número de constantes elásticas del
material de 21 a 2.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-195-320.jpg)

![176
6 Elasticidad lineal
Finalmente, las ecuaciones (6.24) pueden reescribirse utilizando la notación
ingenieril para las componentes de los tensores de tensión de deformación
como:
[
)]
(
1
σx − ν σy + σz
E
1
ε y = σ y − ν(σ x + σ z )
E
1
εz = σz − ν σx + σy
E
εx =
[
]
[
)]
(
1
τ xy
G
1
γ xz = τ xz
G
1
γ yz = τ yz
G
γ xy =
(6.25)
Ejemplo 6-1 – Para la pieza de la figura, constituida por una material elástico lineal
isótropo, con módulo de Young E y módulo de deformación transversal G , se admite el
siguiente estado tensional uniforme:
σx ≠ 0
;
σ y = σ z = τ xy = τ xz = τ yz = 0
Obtener las deformaciones ingenieriles.
y
σx
σx
x
z
Figura 6-3
Resolución:
De las ecuaciones de (6.25) se puede obtener:
1
ε x = E σ x
σ
σ y = σ z = 0 ⇒ ε y = − ν x
E
σx
ε z = − ν
E
τ xy = τ xz = τ yz
1
γ xy = G τ xy = 0
1
= 0 ⇒ γ xz = τ xz = 0
G
1
γ yz = G τ yz = 0
Como consecuencia de dichas deformaciones la pieza se estira en la dirección
x y se contrae en las direcciones y , z (ver Figura 6-3).
6.4 Ley de Hooke en componentes esféricas
y desviadoras
Consideremos la descomposición de los tensores de tensiones σ y de
deformaciones ε en su parte esférica y desviadora:
1
σ = Tr (σ ) 1 + σ´= σ m 1 + σ´
3 '
) (
σm
© Els autors, 2002; © Edicions UPC, 2002
(6.26)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-197-320.jpg)
![177
6 Elasticidad lineal
1
1
ε = Tr (ε) 1 + ε´= e 1 + ε´
(
3 )'
3
e
(6.27)
La deformación volumétrica e = Tr (ε ) se obtiene a partir de la traza de la
ecuación (6.24):
e = Tr (ε ) = −
ν
1+ ν
1 − 2ν
) 3 (1 − 2ν) σ m
Tr (σ ) Tr (1) +
Tr (σ ) =
Tr (' =
)σ
(
)'
(
E
E
E
E
3σm
3
(6.28)
E
σ m = 3(1 − 2ν) e = K e
⇒ def
E
K = λ + 2 µ =
= Módulo de deformació n volumétr ica
3
3(1 − 2ν )
(6.29)
Substituyendo las ecuaciones (6.26), (6.27) y (6.29)en la (6.24):
1+ν
ν
3σ m 1 +
[σ m 1 + σ´] =
E
E
1 − 2ν
1 +ν
1
1+ν ⇒
=
σ m 1+
σ´= e 1 +
σ´
)'
(
3
E
E
E
E e
3(1−2ν )
ε=−
1
1
1+ν
ε = e 1 + ε´= e 1 +
σ´
3
3
E
⇒ ε´=
(6.30)
1 +ν
1
1
σ´ =
σ´=
σ´
2µ
2G
E
!
1
2µ
Las ecuaciones (6.29) y (6.30) relacionan la parte esférica (caracterizada por la
tensión media σ m y la deformación volumétrica e ) y la parte desviadora ( σ´ y
ε´ ) de los tensores de tensión y de deformación:
σ m = Ke
→ Parte esférica
σ´= 2Gε´
σ′ = 2Gε ′
ij
ij
(6.31)
→ Parte desviadora
, j ∈{1,2,3}
i
Observación 6-6
Nótese la proporcionalidad tanto entre σ m y e como entre la
componentes (una a una) σ′ij y ε′ij (ver Figura 6-4).
σ′
ij
σm
2G = 2µ
K
e
ε′
ij
Figura 6-4 Ley de Hooke en componentes esféricas y desviadoras
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-198-320.jpg)

![6 Elasticidad lineal
1
1
1
ε : C : ε = σ : ε = [λTr (ε ) 1 + 2µε ]: ε =
2
2
2
1
1
= λTr (ε ) 1: ε + µε : ε = λTr 2 (ε ) + µ ε : ε
)'
(
2
2
Tr (ε )
179
ˆ
u (ε ) =
(6.33)
La expresión (6.33) puede ponerse también en función de las componentes
esféricas y desviadoras de la deformación:
ˆ
u (ε ) =
N O T A
La traza de un tensor
desviador es siempre
nula ⇒ Tr (ε ′) = 0
1
1
λ ( Tr (ε ) ) 2 + µ ε : ε = λ e 2 + µε : ε
)(
'
2
2
e
2
1
1
1
ε : ε = e 1 + ε´ : e 1 + ε´ = e 2 1 : 1 + e 1 : ε ´ + ε´: ε´=
!
(
3 )'
3
3
9
3
Tr (ε ′ )=0
1
= e 2 + ε´: ε´
3
(6.34)
(6.35)
y substituyendo la ecuación (6.35) en la (6.34):
ˆ
⇒ u (ε ) =
1
1
1
2
λ e 2 + µ e 2 + μ ε´: ε´= λ + µ e 2 + μ ε´: ε´
2
3
2 3
) ( '
(6.36)
K
ˆ
u (ε ) =
1
K e 2 + µ ε´: ε´≥ 0
2
(6.37)
Considérese ahora un cierto material elástico lineal isótropo, caracterizado por
un cierto valor de sus propiedades elásticas. La ecuación (6.37) debe cumplirse
para cualquier proceso de deformación. Consideremos dos tipos particulares:
1) Un proceso de deformación puramente esférico:
1
1
ε (1) = e 1
2
ˆ (1)
3 →u = K e ≥0 ⇒ K 0
2
(1 )
ε′ = 0
(6.38)
2) Un proceso de deformación puramente desviador:
N O T A
El producto
doblemente contraído
de un tensor por él
mismo es siempre
mayor o igual a
cero
⇒ ε ′ : ε ′ = ε ij ε ij ≥ 0
!
≥0
ε ( 2) = ε′
ˆ ( 2)
→ u = µ ε´: ε´≥ 0 ⇒ µ 0
e (2) = 0
(6.39)
Las ecuaciones (6.38) y (6.39) conducen a las siguientes limitaciones en los
valores de las constantes elásticas:
K=
E
0
3(1 − 2ν )
;
µ=G =
E
0
2(1 + ν )
(6.40)
La experiencia demuestra que el coeficiente de Poisson ν es siempre no negativo y
en consecuencia:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-200-320.jpg)





![185
6 Elasticidad lineal
6.7 Resolución del problema elástico lineal
La resolución del problema elástico lineal puede hacerse típicamente con dos
planteamientos distintos:
a) planteamiento en desplazamientos
b) planteamiento en tensiones.
Sus nombres respectivos provienen de cuál es la incógnita primal que se considera
para el problema (desplazamientos o tensiones, respectivamente).
Observación 6-9
En la actualidad el planteamiento en desplazamientos tiene mayor
aplicación puesto que en él están basados la mayoría de los métodos
de resolución numérica del problema elástico lineal.
6.7.1 Planteamiento en desplazamientos: Ecuaciones de Navier
Consideremos las ecuaciones del problema elástico lineal:
∂ 2u
(Ecuación de Cauchy)
2
∂t
σ = λTr (ε ) 1 + 2µε
(Ecuación constitutiva)
1
ε = ∇ S u = (u ⊗ ∇ + ∇ ⊗ u ) (Ecuación geométrica)
2
∇ ⋅ σ + ρ0b = ρ0
Γu : u = u *
Γσ : t * = σ ⋅ n
Condiciones de contorno en el espacio
u (x,0) = 0
Condiciones iniciales
%
u (x,0) = v 0
(6.56)
(6.57)
(6.58)
El objetivo es plantear un sistema reducido, en el que intervengan como
incógnita sólo el campo de desplazamientos u(x, t ) . El primer paso consiste en
substituir en (6.56) la ecuación constitutiva en la ecuación de Cauchy:
∇ ⋅ σ + ρ 0 b = ∇ ⋅ [λTr (ε ) 1 + 2 µε ] + ρ 0 b = ρ 0
λ ∇ ⋅ [Tr (ε ) 1] + 2µ∇ ⋅ ε + ρ 0 b = ρ 0
∂ 2u
⇒
∂t2
∂ 2u
(6.59)
∂t2
La ecuación (6.59) puede ser reelaborada teniendo en cuenta las siguientes
identidades:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-206-320.jpg)
![186
6 Elasticidad lineal
N O T A
Se define el operador
Laplaciano de un vector
v como:
[∇ v]
2
i
def
=
2
∂ vi
∂x j ∂x j
∂ε ij
∂ 1 ∂u i ∂u j
=
(∇ ⋅ ε )i =
∂x + ∂x =
∂x j ∂x j 2 j
i
2
∂u j 1 2
1 ∂ ui
1 ∂
= (∇ u) i + 1 ∂ (∇ ⋅ u) = ⇒
+
=
2 ∂x j ∂x j 2 ∂x i ∂x j 2
2 ∂x i
(
) (
'
)('
) '
(∇(∇⋅u))
∇⋅u
(∇ 2 u)
i
i
1
1
∈{1,2,3}
= ∇ 2 u + ∇( ∇ ⋅ u )
i
2
2
i
⇒
[∇ ⋅ (Tr (ε) 1)]i =
=
∇⋅ε =
1
1
∇(∇ ⋅ u ) + ∇ 2 u
2
2
∂
∂
(ε ll δ ij ) =
∂x j
∂x j
∂
∂x i
∂u l
∂ δ ij =
xl
⇒
i ∈ {1,2,3}
∂u l ∂
∂x = ∂x (∇ ⋅ u) = [∇ (∇ ⋅ u)]i
( )i (
l
'
) '
(∇ (∇⋅u))
∇⋅u
i
⇒
(6.60)
(6.61)
∇ ⋅ (Tr (ε) 1) = ∇ (∇ ⋅ u)
y substituyendo las ecuaciones (6.60) y (6.61) en la (6.59):
λ∇(∇ ⋅ u ) + µ∇(∇ ⋅ u ) + µ∇ 2 u + ρ 0 b = ρ 0
∂ 2u
⇒
∂t 2
∂ 2u
2
Ecuaciones (λ + µ )∇(∇ ⋅ u ) + µ∇ u + ρ 0 b = ρ 0 2
∂t
de Navier
%%
1
i ∈ { ,2,3}
(λ + µ )u j , ji + µ u i , jj + ρ 0 bi = ρ 0 u i
(6.62)
(6.63)
que constituye un sistema de EDP’s de segundo orden en los desplazamientos
u (x, t ) (que debe ser, por lo tanto, integrado en R 3 × R + ), recibiendo el
nombre de ecuaciones de Navier.
Las condiciones de contorno pueden escribirse también en función de los
desplazamientos como sigue. Substituyendo la ecuación constitutiva (6.56) en
la condición de contorno en Γσ de (6.57):
t * = σ ⋅ n = [λTr (ε ) 1 + 2µ ε ] ⋅ n = λ (Tr (ε ) )n + 2µ ! ⋅ n =
ε
)('
∇⋅u
∇ S ⋅u
1
= λ (∇ ⋅ u ) n + 2µ (u ⊗ ∇ + ∇ ⊗ u ) ⋅ n =
2
= λ(∇ ⋅ u) n + µ(u ⊗ ∇ + ∇ ⊗ u ) ⋅ n
(6.64)
y las condiciones de contorno en el espacio (6.57), escritas ahora en función de
los desplazamientos, quedan:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-207-320.jpg)


![189
6 Elasticidad lineal
Demostración:
Consideremos el problema elástico lineal esquematizado en la Figura 6-11
T
sujeto a las acciones definidas por A(x,t) ≡ b(x, t ), u* (x, t ), t * ( x, t ), v 0 ( x) ,
en los dominios V , Γu , Γσ y V , respectivamente, (cumpliéndose que
Γσ + Γu = ∂V y Γσ * Γu = ∅ ).
Γσ : t * (x, t )
z
V
b (x, t )
y
x
Figura 6-11 – Problema elástico lineal
Las posibles soluciones R(x,t) ≡ [u( x, t ), ε( x, t ), σ(x, t )]T del problema elástico
lineal cuasi-estático deben verificar las ecuaciones:
Ecuación constitutiva:
∂ 2u
∂t2
σ = λTr (ε ) 1 + 2µε
Ecuación geométrica:
ε = ∇Su =
Condiciones de contorno en el
espacio:
Γu : u = u *
Γσ : t * = σ ⋅ n
(6.74)
Condiciones iniciales:
u (x,0 ) = 0
%
u (x,0 ) = v 0
(6.75)
Ecuación de Cauchy:
∇ ⋅ σ + ρ0b = ρ0
(6.73)
1
(u ⊗ ∇ + ∇ ⊗ u )
2
La demostración de la unicidad de la solución se hace como sigue.
Supondremos que la solución no es única, es decir, que existen dos soluciones
distintas al problema:
u (1) (x, t )
u ( 2 ) (x, t )
(1)
R (1) (x,t) ≡ ε ( x, t ) ; R ( 2 )(x,t) ≡ ε ( 2) ( x, t )
(1)
( 2)
σ ( x, t )
σ (x, t )
(6.76)
R (1) ≠ R ( 2 )
que, por lo tanto, cumplen las ecuaciones (6.73) a (6.75) y son respuestas
T
elásticas a la acción A(x,t) ≡ b(x, t ), u* (x, t ), t * ( x, t ), v 0 ( x) . Consideremos
ahora la posible respuesta constituida por la diferencia R
© Els autors, 2002; © Edicions UPC, 2002
( 2)
− R (1) :](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-210-320.jpg)






![196
6 Elasticidad lineal
Tensor de
→
propiedade s térmicas
N O T A
La expresión más
general de un tensor
isótropo de segundo orden
es : β = β 1 ∀β
β = β T
β ij = β ji
i, j ∈{1, 2,3}
(6.108)
Para el caso de material isótropo el tensor C debe ser un tensor de cuarto orden
isótropo y β uno isótropo de segundo orden, es decir:
C = λ1 ⊗ 1 + 2µI
C ijkl = λδ ij δ kl + µ δ ik δ jl + δ il δ jk
[
]
i, j, k , l ∈{1, 2,3}
β = β 1
β = β δ
1
ij i, j ∈ { ,2,3}
ij
(6.109)
donde ahora aparece una sola propiedad térmica β además de las constantes
elásticas λ y µ . Sustituyendo la ecuación (6.109) en la ecuación constitutiva
not
(6.107) y definiendo (θ − θ 0 ) = ∆θ , se obtiene:
σ = λTr (ε) 1 + 2µ ε − β∆θ 1
Ecuación constituti va
para material termo - →
elástico lineal isótropo σ ij = λε ll δ ij + 2 µ ε ij − β ∆θ δ ij i, j ∈{1,2,3}
(6.110)
6.10.2 Ecuación constitutiva inversa
La ecuación (6.110) puede invertirse como sigue:
σ = C : ε − ∆θ β ⇒ ε = C −1 : σ + ∆θ C −1 : β = C −1 : σ + ∆θ α
)('
α
def −1
α = C : β → Tensor de coeficient es de dilatación térmica
(6.111)
donde α es un tensor de segundo orden (simétrico) que involucra seis
propiedades térmicas denominadas coeficientes de dilatación térmica. Para el caso
isotrópo, de acuerdo con las ecuaciones (6.110) y (6.24), puede escribirse, tras
una cierta manipulación algebraica:
ν
1+ ν
Ecuación constituti va ε = − E Tr (σ )1 + E σ + α∆θ 1
inversa para material
ν
1+ ν
→ ε ij = − σ ll δ ij +
σ ij + α∆θδ ij
(6.112)
termo - elástico lineal
E
E
i, j ∈{1, 2,3}
isótropo
siendo α un escalar denominado coeficiente de dilatación térmica relacionado
con la propiedad térmica β de la ecuación (6.110) mediante:
Coeficient e de
1 − 2ν
→α =
β
dilatación térmica
E
(6.113)
6.10.3 Tensiones y deformaciones térmicas
La comparación de las ecuaciones constitutivas elástica lineal (6.20) y
termoelástica lineal (6.110) sugiere la siguiente descomposición:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-217-320.jpg)
![197
6 Elasticidad lineal
σ = λ Tr (ε )1 + 2µ ε − β∆θ 1 = σ nt − σ t
) (
' )'
(
σ nt
σt
def
nt
Tensión no - térmica → σ = λ Tr (ε )1 + 2µ ε
def
Tensión té rmica
→ σ t = β∆θ 1
(6.114)
Donde: σ nt representa la tensión producida en el caso de no existencia de
fenómenos térmicos y σ t es la denominada tensión térmica o tensión correctora
debida al incremento de temperatura.
Una operación similar puede realizarse con las ecuaciones constitutivas
inversas para el caso elástico lineal y termoelástico lineal de las ecuaciones
(6.24) y (6.112), obteniéndose:
ν
1+ ν
ε = − Tr (σ )1 +
σ + α∆θ 1 = ε nt + ε t
) '
(
)E
( E '
εt
ε nt
def
ν
1+ ν
Deformació n no - térmica → ε nt = − Tr (σ )1 +
σ
E
E
def
→ ε t = α∆θ 1
Deformació n térmica
(6.115)
En definitiva, en termoelasticidad lineal pueden realizarse las siguientes
descomposiciones de los tensores de tensión y de deformación:
Total
Componente no-térmica
σ nt = C : ε
Material isótropo:
Material isótropo:
σ t = β ∆θ 1
ε nt = C −1 : σ
t
σ t = ∆θ β
σ = λTr (ε ) 1 + 2 µ ε
σ = σ −σ
nt
Componente térmica
ε t = ∆θ α
Material isótropo:
Material isótropo:
nt
ε = ε nt + ε t
ε nt = −
ν
1+ ν
Tr (σ) 1 +
σ
E
E
(6.116)
(6.117)
ε t = α ∆θ 1
donde las componentes térmicas aparecen debido a la consideración de
procesos térmicos. A partir de las ecuaciones (6.116) y (6.117), pueden
obtenerse las siguientes expresiones:
ε nt = C −1 : σ ⇒
σ nt = C : ε ⇒
[
σ = C : ε nt = C : ε − ε t
[
]
ε = C −1 : σ nt = C −1 : σ + σ t
© Els autors, 2002; © Edicions UPC, 2002
(6.118)
]
(6.119)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-218-320.jpg)











![209
6 Elasticidad lineal
∂ 2u
∂t2
σ = λTr (ε ) 1 + 2µε − β ∆θ 1
) (
'
C:ε
1
ε = ∇ S u = (u ⊗ ∇ + ∇ ⊗ u )
2
Ecuación de Cauchy:
∇ ⋅ σ + ρ0b = ρ0
Ecuación constitutiva:
Ecuación geométrica:
(6.147)
Γu : u = u *
Condiciones de contorno en
el espacio:
(6.148)
Γσ : t * = σ ⋅ n
u (x,0 ) = 0
%
u (x,0 ) = v 0
Condiciones iniciales:
(6.149)
que definen el conjunto genérico acción-respuesta:
b( x, t )
*
u( x, t )
u (x, t )
*
A ( x,t ) ≡ t ( x, t ) → R (x,t ) ≡ ε (x, t )
∆θ
σ(x, t )
( x, t )
v (x )
0
(6.150)
Γσ : σ ⋅ n = t *
t*
z
b
∆θ ≠ 0
Γu : u = u*
y
x
Figura 6-19
Observación 6-19
Los distintos operadores (escalares, vectoriales, tensoriales y
diferenciales) que intervienen en las ecuaciones de gobierno del
problema (6.147) a (6.149) son lineales, es decir, dados dos escalares
a y b cualesquiera:
∇ ⋅ (• ) → lineal ⇒ ∇ ⋅ (ax + by ) = a∇ ⋅ x + b∇ ⋅ y
C : (• ) → lineal ⇒ C : [ax + by ] = a C : x + b C : y
∇ S (•) → lineal ⇒ ∇ S (ax + by ) = a∇ S x + b∇ S y
2
2
2
(•) → lineal ⇒ ∂ (ax + by ) = a ∂ x + b ∂ y
2
2
2
2
∂2
∂t
∂t
∂t
∂t
Consideremos ahora dos posibles sistemas de acciones A (1) y A (2) :
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-230-320.jpg)




![7 Elasticidad linea l
plana
7.1 Introducción
Como se vio en el capítulo 6, desde el punto de vista matemático, el problema
elástico consiste en un sistema de EDP’s que debe ser resuelto en las tres
dimensiones del espacio y en la dimensión asociada al tiempo ( R 3 × R + ). Sin
embargo, existen ciertas situaciones en las que dicho problema puede ser
simplificado, reduciéndose el problema a dos dimensiones espaciales R 2 ,
además de, eventualmente, la dimensión temporal ( R 2 × R + ). La posibilidad de
esta simplificación reside en que, en ciertos casos, la propia geometría y
condiciones de contorno del problema permite identificar una dirección irrelevante
(asociada a una dimensión del problema) de tal forman que pueden plantearse
a priori soluciones del problema elástico independientes de dicha dimensión.
Si se considera un sistema local de coordenadas {x, y, z} en el que dicha
dirección irrelevante (supuesta constante) coincide con la dirección z , el
análisis queda reducido al plano {x, y} , y de ahí el nombre elasticidad plana con
el que suele denominarse a estos problemas. A su vez, éstos suelen dividirse en
dos grandes grupos asociados a dos familias de hipótesis simplificativas:
•
•
Problemas de tensión plana.
Problemas de deformación plana.
Por simplicidad consideraremos aquí el caso isotérmico, aunque no hay ninguna
limitación intrínseca para la generalización de los resultados que van a
obtenerse al caso termoelástico.
7.2 Estado de tensión plana
El estado de tensión plana queda caracterizado por las siguientes hipótesis
simplificativas:
1) El estado tensional es de la forma:
[σ]xyz
σ x τ xy
≡ τ xy σ y
0
0
0
0
0
© Els autors, 2002; © Edicions UPC, 2002
(7.1)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-235-320.jpg)

![217
7 Elasticidad lineal plana
Observación 7-1
La pieza con geometría y acciones definidas por las ecuaciones (7.3) y
(7.4) y el estado de tensión plana, indicado por las ecuaciones (7.1) y
(7.2) y esquematizado en la figura Figura 7-2, resultan compatibles.
En efecto, aplicando las condiciones de contorno Γσ sobre la pieza se
obtiene:
•
+
−
Superficies laterales: Γσ y Γσ :
σ x
σ ⋅ n = τ xy
0
0
n=0
± 1
•
τ xy
σy
0
0 0 0
0 0 = 0
0 ± 1 0
e
Canto Γσ :
σ x
σ( x, y , t ) ⋅ n = τ xy
0
n x
n = n y
0
τ xy
σy
0
0
0
0
n x t x ( x, y , t )
n = t ( x, y , t )
y x
0
0
compatibles con las suposiciones (7.4) y (7.5).
y
σy
N O T A
τ xy
El hecho de que todas
las tensiones no nulas
estén contenidas en el
plano x − y da lugar
σx
x
al nombre de tensión
plana.
z
σ x
σ = τ xy
0
τ xy
σy
0
0
0
0
Figura 7-2– Estado de tensión plana
7.2.1 Campo de deformaciones. Ecuación constitutiva
Consideremos ahora la ecuación constitutiva elástica lineal:
ε=−
R E C O R D A T O R I O
Las deformaciones
tangenciales ingenieriles
se definen como:
1+ ν
1
ν
ν
Tr (σ )1 +
σ = − Tr (σ )1 +
σ
2G
E
E
E
(7.6)
que aplicada al estado tensional (7.1) y en notación ingenieril proporciona las
deformaciones como:
εx
=
γ xy = 2ε xy
εy
=
γ xz = 2ε xz
γ yz = 2ε yz
εz
=
[
[
[
(
)]
]
)]
[
[
1
1
σ x − ν σ y + σ z = σ x − νσ y
E
E
1
1
σ y − ν(σ x + σ z ) = σ y − νσ x
E
E
1
ν
σz − ν σ x + σ y = − σ x + σ y
E
E
(
[
]
]
]
γ xy
γ xz
γ yz
1
τ xy
G
1
=
τ xz = 0
G
1
=
τ yz = 0
G
=
(7.7)
donde se han tenido en cuenta las condiciones σ z = τ xz = τ yz = 0 . En vista de las
ecuaciones (7.2) y (7.7) puede concluirse que tampoco las deformaciones dependen
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-237-320.jpg)
![218
7 Elasticidad lineal plana
de la coordenada z ( ⇒ ε = ε( x, y , t ) ). Asimismo, en la ecuación (7.7) puede
resolverse la deformación ε z como:
εz = −
ν
(ε x + ε y )
1− ν
(7.8)
En definitiva el tensor de deformaciones para el caso de tensión plana resulta:
εx
1
ε(x, y, t ) ≡ γ xy
2
0
0
0
εz
1
γ xy
2
εy
0
εz = −
ν
(ε x + ε y )
1− ν
(7.9)
y la sustitución de la ecuación (7.8) en la ecuación (7.7) conduce, tras algunas
operaciones algebraicas, a:
σx
=
σy
=
τ xy
=
E
[ε x + νε y ]
(1 − ν 2 )
E
[ε y + νε x ]
(1 − ν 2 )
E
γ xy
2 (1 + ν)
(7.10)
que puede reescribirse como:
1
σ x
0
ν
E
ν 1
0
σ y =
2
τ 1 − ν 0 0 1 − ν
xy
#
$ $%%%#%%%
2
{σ}
CT .P .
ε x
ε y ⇒
γ
xy
#
$
{ε}
{σ}= C T .P. ⋅ {ε}
(7.11)
7.2.2 Campo de desplazamientos
Las ecuaciones geométricas del problema :
ε ( x, t ) = ∇ S u ( x, t ) =
1
(u ⊗ ∇ + ∇ ⊗ u ) ⇒
2
(7.12)
pueden descomponerse en dos grupos:
1) Las que no afectan al desplazamiento u z (y que serían hipotéticamente
integrables en R 2 , en el dominio x − y ):
ε x ( x, y, t )
=
ε y (x, y, t )
=
γ xy (x, y , t ) = 2ε xy
=
integració n en R 2
u x = u x ( x, y, t )
⇒
∂y
u y = u x ( x, y, t )
∂u x ∂u y
+
∂y
∂x
∂u x
∂x
∂u y
© Els autors, 2002; © Edicions UPC, 2002
(7.13)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-238-320.jpg)














![8 Plasticidad
8.1 Introducción
Los modelos (ecuaciones constitutivas) elastoplásticos se utilizan en Mecánica
de Medios Continuos para representar el comportamiento mecánico de
materiales cuando se sobrepasan ciertos límites en los valores de las tensiones
(o de las deformaciones) y dicho comportamiento deja de ser representable
mediante modelos más simples como son los elásticos. En este capítulo se van
a estudiar dichos modelos considerando, en todos los casos, que las
deformaciones son infinitesimales.
A grandes rasgos, la Plasticidad introduce dos grandes modificaciones sobre la
Elasticidad lineal estudiada en los capítulos 6 y 7:
1) La pérdida de linealidad (las tensiones ya no son proporcionales a las
deformaciones).
2) La aparición del concepto de deformación plástica o permanente. Una parte de la
deformación que se genera durante el proceso de carga no se recupera
durante el proceso de descarga.
N O T A
Los conceptos de este
apartado son un
recordatorio de los
considerados en el
capítulo 4, apartados
4.4.4 a 4.4.7.
8.2 Nociones previas
8.2.1 Invariantes tensionales
Sea σ el tensor de tensiones de Cauchy y su matriz de componentes en una
base asociada a los ejes cartesianos {x, y , z} (ver Figura 8-1):
[σ]xyz
σ x
= τ xy
τ xz
τ xy
σy
τ yz
τ xz
τ yz
σz
(8.1)
Al tratarse de un tensor simétrico de segundo orden, diagonalizará en una base
ortonormal y todos sus autovalores serán números reales. Sea entonces
{x ′, y ′, z ′} un sistema de ejes cartesianos asociado a la base en el que σ
diagonaliza (autovectores de σ ). Su matriz de componentes en dicha base será:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-253-320.jpg)
![234
8 Plasticidad
[σ]x´y´z´
σ 1
=0
0
0
σ2
0
0
0
σ3
(8.2)
donde σ1 ≥ σ 2 ≥ σ 3 , denominadas tensiones principales, son los autovalores de σ
y a las direcciones asociadas a los ejes {x ′, y ′, z ′} se las denomina direcciones
principales (ver Figura 8-1).
z
z´
σz
σ2
τ zy
τ zx
τ xz
σx
σ3
y´
τ yz
τ xy
σy
τ yx
y
σ1
x
x´
Figura 8-1 – Diagonalización del tensor de tensiones.
Para obtener las tensiones y las direcciones principales de σ , hay que resolver
el correspondiente problema de autovalores y autovectores:
Encontrar λ y v tal que : σ ⋅ v = λv ⇒ [σ − λ1]⋅ v = 0
(8.3)
donde λ corresponde a los autovalores y v a los autovectores. Condición
necesaria y suficiente para que el sistema (8.3) tenga solución es que:
det [σ − λ1] = σ − λ1 = 0
(8.4)
que en componentes resulta:
σx − λ
τ xy
τ yx
σy − λ
τ xz
τ yz
τ xz
τ yz
=0
(8.5)
σz − λ
El desarrollo algebraico de la ecuación (8.5), denominada ecuación característica,
corresponde a una ecuación polinómica de tercer grado en λ , que puede
escribirse como:
λ3 − I 1 λ2 − I 2 λ − I 3 = 0
(8.6)
donde los coeficientes I 1 ( σ ij ), I 2 ( σij ) e I 3 ( σ ij ) son unas ciertas funciones de las
componentes σ ij del tensor σ en el sistema de coordenadas {x, y , z} . Sin
embargo, las soluciones de la ecuación (8.6), que serán función de los
coeficientes de la misma ( I 1 , I 2 , I 3 ), son las tensiones principales que, por otra
parte, son independientes de cual sea el sistema de ejes en el cual se haya
expresado σ . En consecuencia, dichos coeficientes deben de ser invariantes
frente a cualquier cambio de base. Por este motivo, a los coeficientes I 1 , I 2 e I 3
se les denomina invariantes I o invariantes fundamentales y su expresión (tras el
correspondiente desarrollo de la ecuación (8.5)) resulta ser:
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-254-320.jpg)





![240
8 Plasticidad
1 / 3
3
| OA |= OP ⋅ n = {σ1 , σ 2 , σ 3 }1 / 3 =
(σ1 + σ 2 + σ 3 ) = 3 σ m
⇒
3
1 / 3
| OA |= 3 σ oct
σ oct = σ m =
I1
3
(8.15)
(8.16)
donde se ha tenido en cuenta la definición (8.9) de la tensión media σ m .
La distancia AP puede calcularse resolviendo el triángulo rectángulo OAP de
la Figura 8-5:
2
2
2
1
2
2
AP = OP − OA = σ 12 + σ 2 + σ 3 − (σ 1 + σ 2 + σ 3 )2
3
(8.17)
Mediante algunas operaciones algebraicas esta distancia puede expresarse en
′
función del segundo invariante, J 2 , del tensor de tensiones desviador de la
ecuación (8.14) como:
2
′
AP = 2 J 2 ' ⇒ AP = 2 ( J 2 )1 2
′ 12
⇒ τ oct = 3 [J 2 ]
| AP |= 3 τ oct
2
(8.18)
′
Expresiones alternativas de τ oct en función del valor de J 2 en la ecuación
(8.14) son:
1/ 2
1 2
1
2
2
2
σ1 + σ 2 + σ 3 − 3 (σ1 + σ 2 + σ 3 )
3
2
2
2 1/ 2
1
=
σ1 − σ 2 + σ 2 − σ 3 + σ1 − σ 3
3 3
τ oct =
τ oct
(
) (
) (
(8.19)
)
Observación 8-5
•
Si el estado tensional σ es puramente esférico :
′
σ = σ esf = σ m 1 ⇔ σ ′ = σ − σ esf = 0 ⇔ J 2 = 0 ⇔
τ oct = 0
(un estado esférico queda caracterizado por τ oct = 0 y, por tanto,
pertenece al eje de tensión hidrostática, ver Figura 8-5).
•
Si el estado tensional σ es puramente desviador :
σ = σ′ ⇔ σ m = Tr (σ) = Tr (σ ′) = 0 ⇔ σ oct = 0
(un estado desviador queda caracterizado por σ oct = 0 y pertenece al
plano octaédrico que pasa por el origen).
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-260-320.jpg)
![241
8 Plasticidad
Observación 8-6
Un punto P del espacio de tensiones principales queda unívocamente
′ ′
caracterizado por los tres invariantes I 1 ≡ J 1 , J 2 , J 3 (ver Figura 8-6):
−
1
I 1 ) caracteriza la distancia al origen
3
( = 3 σ oct ) del plano octaédrico Π sobre el que está el punto
(sitúa al punto P sobre un cierto plano octaédrico).
−
′
J 2 caracteriza la distancia del punto al eje de tensión hidrostática
(sitúa al punto P sobre un círculo del plano octaédrico con centro
′
en el eje de tensión hidrostática y radio 3 τ oct = 2 [J 2 ]1 / 2 ).
−
′
J 3 caracteriza la posición del punto dentro del círculo definiendo
′
el ángulo θ( J 3 ) .
I 1 (a través de σ oct =
′
θ( J 3 )
σ3
′
3τ oct = 2 ( J 2 )1 / 2
P
Eje de tensión hidrostática
O
3σ oct = I1 / 3
σ1
Π
σ2
Figura 8-6
Observación 8-7
La Figura 8-7 muestra la proyección del espacio de tensiones
principales sobre el plano octaédrico Π . En dicha proyección puede
observarse la división del espacio de tensiones principales en seis
sectores, caracterizados por las seis posibles ordenaciones distintas de
dichas tensiones y separados por las proyecciones de los planos
bisectores σ 2 = σ 3 , σ1 = σ 3 y σ1 = σ 2 . La elección del criterio
σ1 ≥ σ 2 ≥ σ 3 reduce automáticamente el dominio de trabajo factible
al sector sombreado en la figura y la intersección de cualquier
superficie, del tipo f ( σ1 , σ 2 , σ 3 ) = 0 , con el plano Π se reduce a una
curva en dicho sector. Sin embargo, resulta automático extender dicha
curva a los demás sectores (es decir, dibujar la curva que se obtendría
con la misma función f ( σ1 , σ 2 , σ 3 ) = 0 , pero considerando las
distintas ordenaciones de las tensiones principales) sin más que
aprovechar las condiciones de simetría respecto a los planos
bisectores. La curva resultante, por lo tanto, presentará tres ejes de
simetría respecto a cada uno de los ejes de la Figura 8-7.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-261-320.jpg)










![252
8 Plasticidad
previamente). Un siguiente ciclo carga-descarga-recarga 2 − 4 − 5 − 4 pone de
nuevo de manifiesto que durante el tramo 2 − 4 se ha generado más
deformación plástica, que aparece en forma de deformación permanente en el
punto 5 , y también más deformación elástica ε e , entendida como aquella parte de
la deformación que sí se recupera durante el tramo de descarga 4 − 5 .
8.5.1 Efecto Bauschinger
Consideremos una probeta de un material virgen (que no ha sufrido
previamente estados de deformación inelásticos) sometida a un ensayo de
tracción uniaxial y otra probeta del mismo material virgen sometida a un ensayo
de compresión uniaxial. Para ciertos materiales (denominados isorresistentes) las
respuestas que se obtienen en ambos ensayos, en términos de la curva tensióndeformación σ − ε de la Figura 8-20, son simétricas respecto al origen. Es
decir, que en el ensayo a tracción la respuesta es elástica hasta un valor de
σ = σ e (límite elástico a tracción) y en el ensayo a compresión la respuesta es
también elástica hasta un valor de σ = − σ e (límite elástico a compresión), siendo el
resto de ambas curvas (para un supuesto régimen de carga monótono) también
simétricas. Diremos en este caso que la curva tensión-deformación del material
virgen es simétrica a tracción y compresión.
N O T A
Este procedimiento se
conoce como
estiramiento en frío y tiene
como fin obtener un
límite elástico aparente
del material superior al
del material virgen
σ f σe .
Supongamos ahora que realizamos un ensayo de compresión sobre una
probeta que ha estado previamente sometida a una historia de deformaciones plásticas,
por ejemplo a un ciclo de carga-descarga a tracción como el 0 − 1 − 2 − 3 en la
Figura 8-19 (estiramiento en frío), y sea σ f σ e la máxima tensión a la que ha
estado sometido el material durante el proceso de carga. Un hipotético
comportamiento simétrico llevaría a que el material tuviera ahora un
comportamiento elástico en el rango de tensiones [− σ f , σ f ]. Sin embargo, en
ciertos casos, el comportamiento elástico a compresión termina mucho antes
(ver Figura 8-20). Este es el efecto conocido como efecto Bauschinger o
endurecimiento cinemático. Obsérvese que la curva tensión-deformación del
modelo elástico-friccional de la Figura 8-17 exhibe éste tipo de endurecimiento.
Curva del material virgen
σ
σf
σe
E
1
Curva del material estirado
E
ε
− σe
Curva sin efecto Bauschinger
−σf
Figura 8-20 – Efecto Bauschinger
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-272-320.jpg)



![256
8 Plasticidad
Observación 8-10
Nótese en la ecuación (8.34) la dependencia del espacio de tensiones
admisibles con la variable de endurecimiento α . El dominio
admisible evoluciona con la tensión de fluencia σ f (α) de la forma:
[
]
E σ ≡ − σ f (α), σ f (α) (ver Figura 8-22).
8.6.3 Ecuación constitutiva
Para caracterizar la respuesta del material se definen las siguientes situaciones:
•
Régimen elástico:
σ ∈ E σ ⇒ dσ = E dε
•
Régimen elastoplástico en descarga:
σ ∈ ∂E σ
⇒ dσ = E dε
dF (σ, α) 0
•
(8.36)
(8.37)
Régimen elastoplástico en carga plástica:
σ ∈ ∂E σ
ep
⇒ dσ = E dε
dF (σ, α) = 0
(8.38)
donde E ep es el denominado módulo de deformación elastoplástico.
Observación 8-11
La situación σ ∈ ∂E σ y dF (σ, α) 0 no puede darse, puesto que si
σ ∈ ∂E σ ⇒ (de la ecuación (8.33)) F (σ, α ) ≡ σ − σ f (α ) = 0 .
Si además dF (σ, α) 0 ⇒
F (σ + dσ, α + dα ) = %$ + dF (σ, α) 0
F (σ# )
# , α %#
# $
=0
0
y, de acuerdo con la ecuación (8.35) el estado tensional σ + dσ sería
no admisible.
8.6.4 Ley de endurecimiento. Parámetro de endurecimiento
La ley de endurecimiento proporciona la evolución de la tensión de fluencia
plástica σ f (α) con el parámetro de endurecimiento α (ver Figura 8-22).
Aunque dicha ley de endurecimiento puede ser mas general, es frecuente (y
muchas veces suficiente) considerar una ley de endurecimiento lineal del tipo:
σ f = σ e + H ′ α ⇒ d σ f (α) = H ′ d α
donde H ′ recibe el nombre de parámetro de endurecimiento.
© Els autors, 2002; © Edicions UPC, 2002
(8.39)](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-276-320.jpg)


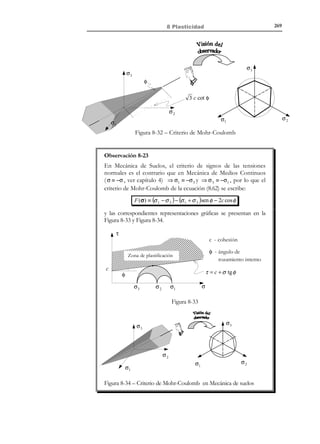

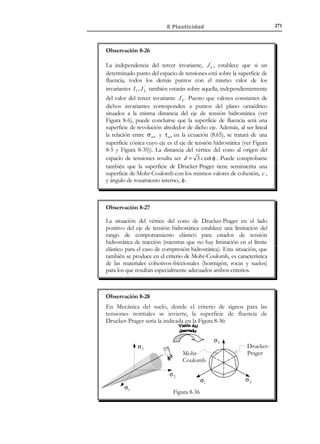

![263
8 Plasticidad
'
donde σ(σ ) = 3J 2 es la tensión efectiva (ver Observación (8.3)). Una expresión
alternativa se obtiene considerando las ecuaciones (8.18) y (8.19) y
substituyéndolas en la ecuación (8.55), obteniéndose:
F ( σ) ≡
[(σ
2
1
1
− σ 2 )2 + (σ 2 − σ 3 )2 + (σ1 − σ 3 )2
]
1/ 2
− σe = 0
(8.56)
La representación gráfica de la superficie de fluencia de von Mises puede verse
en la Figura 8-27.
R=
2
σe
3
σ3
R=
2
σe
3
σ3
σ2
σ1
σ2
Π
Π
σ1
Figura 8-27 – Criterio de von Mises
Observación 8-16
La ecuación (8.55) pone de manifiesto la única dependencia de la
superficie de fluencia de von Mises del segundo invariante del tensor
′
de tensiones J 2 . En consecuencia, todo los puntos de la superficie
′
vendrán caracterizados por un mismo valor de J 2 , lo que define un
cilindro cuyo eje es el eje de tensión hidrostática.
Observación 8-17
El criterio de von Mises es adecuado como criterio de fallo o de
rotura en metales, en los que, típicamente, estados de tensión
hidrostática (tanto de tracción como de compresión) tienen un
comportamiento elástico y la rotura se produce debido a la presencia
de componentes desviadoras de la tensión.
© Els autors, 2002; © Edicions UPC, 2002](https://image.slidesharecdn.com/38696744-mecanica-de-medios-continuos-para-ingenieros-140130163434-phpapp01/85/38696744-mecanica-de-medios-continuos-para-ingenieros-pdf-283-320.jpg)

Este documento presenta un resumen de tres oraciones del texto técnico sobre mecánica de medios continuos: 1) El texto presenta los fundamentos de la mecánica de medios continuos para ingenieros, basándose en la experiencia docente de sus autores en la enseñanza de esta disciplina. 2) El contenido está dividido en dos partes, la primera introduce conceptos fundamentales comunes a todos los medios continuos, mientras que la segunda parte estudia familias específicas como sólidos y fluidos. 3) Finalmente, el texto también
![Análisis estructural solución de vigas por integración [guía de ejercicios]](https://cdn.slidesharecdn.com/ss_thumbnails/anlisisestructuralsolucindevigasporintegracinguadeejercicios-160210062713-thumbnail.jpg?width=640&height=640&fit=bounds)























































