Descargado 42 veces




















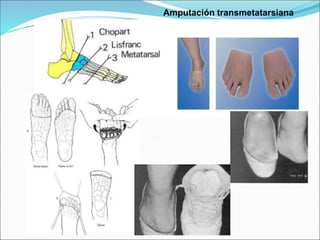












































































































Este documento ofrece una introducción a la protesis, incluyendo definiciones de tipos de amputaciones, causas de amputaciones adquiridas y congénitas, principios y técnicas quirúrgicas de amputación, complicaciones posibles, niveles de amputación en miembros superiores e inferiores, aspectos de la pre y post-protesis, y diferentes tipos de prótesis para miembros superiores e inferiores. También resume brevemente la historia de la osteointegración y sus aplicaciones en prótesis.



































































