microcontroladores PIC: Carrito de obstáculos
•
0 recomendaciones•12 vistas

El documento describe un carrito que evita obstáculos usando dos motores. Cuando se detecta un obstáculo, el motor 1 gira las llantas delanteras a la derecha y el motor 2 hace girar las llantas traseras en reversa durante 3 segundos. Luego, las llantas delanteras vuelven a la posición normal y las traseras cambian a moverse hacia adelante hasta detectar un nuevo obstáculo.
Recomendados

Recomendados
Más contenido relacionado
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
microcontroladores PIC: Carrito de obstáculos
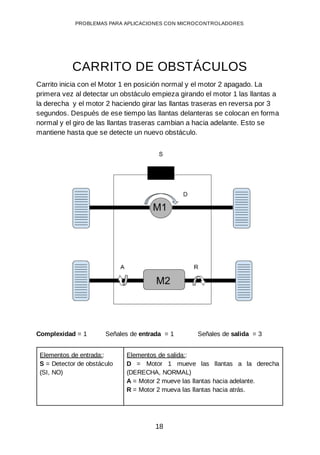
- 1. PROBLEMAS PARA APLICACIONES CON MICROCONTROLADORES CARRITO DE OBSTÁCULOS Carrito inicia con el Motor 1 en posición normal y el motor 2 apagado. La primera vez al detectar un obstáculo empieza girando el motor 1 las llantas a la derecha y el motor 2 haciendo girar las llantas traseras en reversa por 3 segundos. Después de ese tiempo las llantas delanteras se colocan en forma normal y el giro de las llantas traseras cambian a hacia adelante. Esto se mantiene hasta que se detecte un nuevo obstáculo. Complexidad = 1 Señales de entrada = 1 Señales de salida = 3 Elementos de entrada:: S = Detector de obstáculo (SI, NO) Elementos de salida:: D = Motor 1 mueve las llantas a la derecha (DERECHA, NORMAL) A = Motor 2 mueve las llantas hacia adelante. R = Motor 2 mueva las llantas hacia atrás. 18