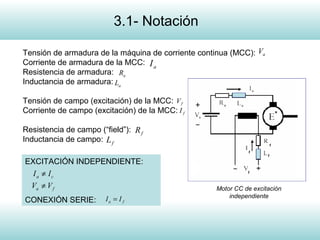
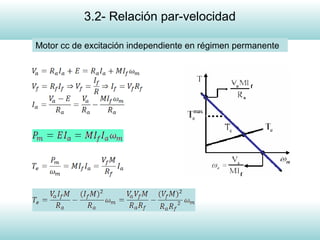
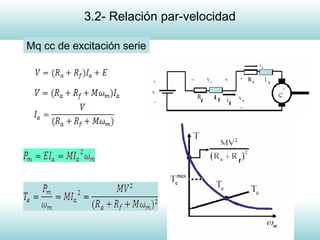
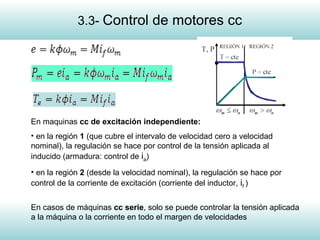
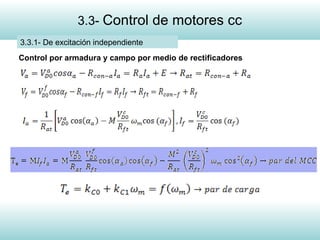
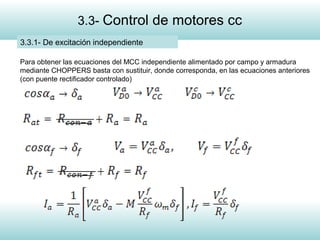
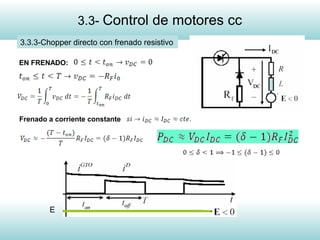
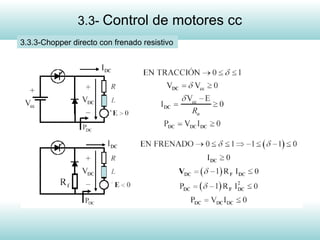
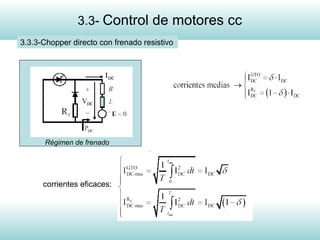
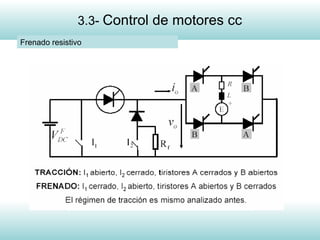
Este documento trata sobre la regulación de máquinas de corriente continua. Explica las notaciones básicas para máquinas de CC, las relaciones entre par y velocidad, y tres métodos comunes de control de motores de CC: excitación independiente, excitación en serie y chopper directo con frenado resistivo.