Descargado 33 veces




![5.- DIAGRAMA DE TIEMPO
Figura 4
Del circuito controlador principal, que debe indicar todas las señales de entrada
y salida del mismo. Este diagrama debe obtenerse de la simulación previa del
sistema en MAX+PLUS II.
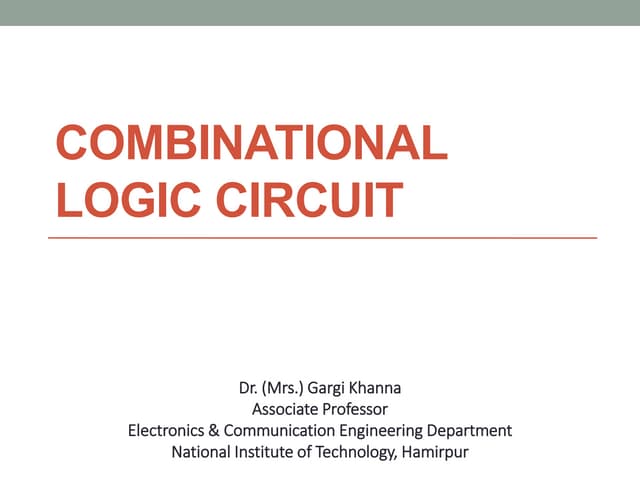
6.- ESQUEMATICO: Quartus II
Figura 5
Compilación del esquemático junto con todo los vhdl agregados al proyecto,
mostrándonos una respectiva ejecución con éxito.
VCC
Resetn INPUT
VCC
Dato INPUT
VCC
Enter INPUT
VCC
Start INPUT
VCC
Mostrar INPUT
VCC
Pulso INPUT
VCC
Auto INPUT
ValidoOUTPUT
EinicioOUTPUT
Ef ormatoOUTPUT
Ef inOUTPUT
DIOUTPUT
Display [1..7]OUTPUT
Resetn
Clock
Dato
Enter
Start
Mostrar
Valido
Einicio
Ef ormato
Ef in
DI
Display [1..7]
data_decoder
inst
CLOCK_8MHz CLOCK_1MHz
CLOCK_100KHz
CLOCK_10KHz
CLOCK_1KHz
CLOCK_100Hz
CLOCK_10Hz
CLOCK_1Hz
CLOCK_DIV
inst1
PB_N
CLOCK_100Hz
PB_SIN_REBOTE
ANTIREBOTE
inst3 PB_SIN_REBOTE
CLOCK
UN_PULSO
RELOJ
inst4
A
B
Sel
S
mux21
inst2](https://image.slidesharecdn.com/carpetaproyecto1-130915170131-phpapp01/85/Decodificador-de-datos-en-vhld-y-usando-Quartus-II-6-320.jpg)



El proyecto consiste en diseñar un decodificador de datos que recibe tramas de 10 bits con un formato específico y valida su secuencia. El circuito, controlado por un botón de inicio y un reloj, identifica errores en la trama y muestra resultados en un display de siete segmentos. Incluye un controlador basado en VHDL para manejar las señales internas y asegurar el correcto funcionamiento del decodificador.