El documento describe dos simulaciones de sistemas neumáticos con control eléctrico y electrónico. La primera simulación es de un elevador de piezas con control eléctrico que usa sensores y relés para controlar el transporte de piezas. La segunda simulación es de una dobladora de placas con control electrónico mediante un módulo digital que reemplaza los relés del control eléctrico anterior.

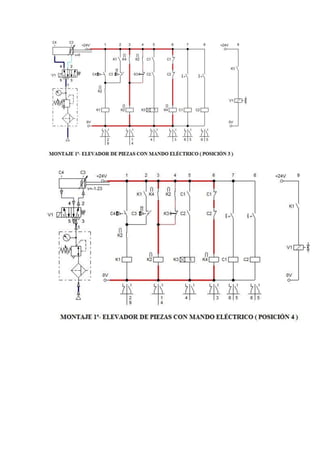

![En la primera parte de las tareas de esta semana nos dan este enunciado, el cual debemos resolver
de manera eléctrica:
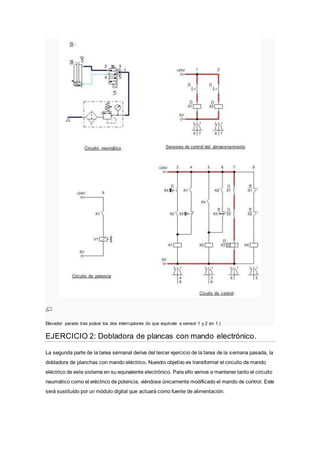
El sistema consta de un sistema de alimentación el cual proporciona bolas al elevador. Este va a ser
simulado como un cilindro de doble efecto en cuyo principio y final(denominados S4 y S3
respectivamente) colocamos dos sensores de pieza. A continuación las bolas son elevadas camino
del almacén. Caben destacar dos sensores de control del almacenamiento S1 y S2. S2 en 1 nos
indica que en el alacén hay al menos 4 bolas, por lo que su posición en 0 señalará almacén vacío.
En cuanto a S1, este es el límite para que no se produzcan atascos. Estos sensores serán
simulados en Fluidsim como dos interruptores que permitirán controlar al usuario los relés auxiliares
K2, K3 y K4. K2 contiene la orden de llenado continuada; K3, (dos abiertos en serie = depósito lleno)
la orden de vaciado; y, K4, (negación con dos relés cerrados y en serie [puerta AND] = depósito
vacío) la de llenado. La lógica de sensores, como se ve en el enunciado, es la siguiente:
0 en S1 y 0 en S2 : Comienzo de la alimentación. El almacén está vacío.
0 en S1 y 1 en S2: o bien estoy llenando el almacén haciendo uso del elevador o bien el robot
está extrayendo bolas de etste vaciándolo. Situación de no hacer nada.
1 en S1 y 0 en S2: Se trata de una situación transitoria o defectuosa en la que se haya
producido un atasco.
1 en S1 y 1 en S2: El almacén está lleno y se produce la parada de la alimentación.
Además de los atascos se puede producir un nuevo problema: S2 en 1 y transitoriamente se pulse 1
en S1. Esto significaría una detención inmediata de la alimentación. Como solución se emplea en K3](https://image.slidesharecdn.com/ejerciciosconfluidsim-180712205212/85/Ejercicios-con-fluidsim-9-320.jpg)