Descargado 20 veces















![- 17 -
Menos grados de libertad [como mucho (x,y, θ)] ⇒ problema más sencillo además:
menor velocidad ⇒ dinámica no es relevante
Robots pueden girar en el sitio (tracción diferencial robot es un punto ⇒ configuración
= (x,y) “hinchar” obstáculos en el radio del robot para compensar
2.5 APLICACIONES
2.5.1 Robótica Autónoma
La Robótica Autónoma es el área de la Robótica que desarrolla robots capaces de
desplazarse y actuar sin intervención humana. Para ello el robot debe percibir su
entorno y actuar de forma adecuada, además de llevar a cabo su tarea.
La Robótica ha tenido grandes avances en entornos estructurados, en los que el
controlador del robot puede tener un mapa detallado de su entorno. Conforme decrece
el grado de estructuración del entorno las tareas se tornan más complejas. Esto ocurre
cuando el robot es móvil y debe tener información de su posición en el mapa interno.
Los mecanismos pueden ser absolutos o relativos, por ejemplo, usando GPS y
odometría, respectivamente.
En entornos no estructurados la solución a través de mapa no es viable, por lo que se
toman caminos en los que no se usa la Inteligencia Artificial clásica, con un control
centralizado, sino la Inteligencia Artificial basada en Multiagentes (originaria en el
trabajo de Rodney Brooks y su arquitectura de subsunción), o en planteamientos
conexionistas usando redes neuronales. La disciplina que usa Algoritmos Genéticos
para evolucionar Redes Neuronales se denomina Robótica Evolutiva.](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-17-320.jpg)




![- 22 -
punto de partida A alcanzar el (los) punto(s) de destino B (B1,B2,...) utilizando su
conocimiento [el del robot] y la información sensorial que recibe [el robot].
La navegación implica resolver sub problemas a nivel de:
Interpretar los datos que le suministra sus
sensores para extraer información útil.
PERCEPCIÓN
Gestionar sus actuadores para conseguir la
LOCALIZACIÓN
trayectoria deseada.
... el robot debe
ser capaz de ...
PLANIFICACIÓN
Determinar su posición en el entorno.
CONTROL DE
MOVIMIENTO
Decidir cómo actuar para alcanzar el
objetivo
Sub problemas de la navegación móvil
Fuente: http://nsl.csie.nctu.edu.tw/NCTUnsReferences/mv05-georouting.pdf](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-22-320.jpg)







![- 31 -
MATLAB integra análisis numérico, cálculo matricial, proceso de señal visualización
gráfica en un entorno completo donde los problemas y sus soluciones son expresados
del mismo modo en que se escribirían tradicionalmente, sin necesidad de hacer uso de
la programación tradicional matrices. MATLAB puede almacenar información en
variables tales como : a = 100 " <Ctrl> <ENTER> para evaluar la celda ". El programa
permite realizar de un modo rápido la resolución numérica de problemas en un tiempo
mucho menor que si se quisiesen resolver estos mismos problemas con lenguajes de
programación tradicionales como pueden ser los lenguajes Fortran, Basic o C.
4.1.1 Uso de Matrices
MatLab emplea matrices porque con ellas se puede describir infinidad de cosas de una
forma altamente flexible y matemáticamente eficiente. Una matriz de pixeles puede ser
una imagen o una película. Una matriz de fluctuaciones de una señal puede ser un
sonido o una voz humana. Y tal vez más significativamente, una matriz puede describir
una relación lineal entre los componentes de un modelo matemático.
En este último sentido, una matriz puede describir el comportamiento de un sistema
extremadamente complejo. Por ejemplo una matriz puede representar el vuelo de un
avión a 40.000 pies de altura, o un filtro digital de procesamiento de señales.
A = [ 1 2 3; 4 5 6; 7 8 9 ]
4.1.2 Archivos-M: Comandos y Funciones
Los archivos de disco que contienen instrucciones de MATLAB se llaman archivos-M.
Esto es así porque siempre tienen una extención de ".m" como la última parte de su
nombre de archivo. Un archivo -M consiste de una secuencia de instrucciones](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-31-320.jpg)


![- 34 -
Tabla 6 Operadores Matriciales
Operadores Ejemplos
Matriciales + adición o suma
– sustracción o resta
* multiplicación
' adjunta (transpuesta o transpuesta conjugada)
^ potenciación
división-izquierda, / división-derecha
.* producto elemento a elemento
./ y . división elemento a elemento
.^ elevar a una potencia elemento a elemento
Tabla 7 Caracteres Especiales
Caracteres Especiales
[ ] Se utilizan para formar vectores y matrices.
(gg) Define precedencia en expresiones
aritméticas.
Tabla 8 Estructuras
CONTROL DE FLUJO
Estructuras FOR simple
FOR anidada
WHILE
IF, ELSE, ELSEIF y
BREAK
Fuente: http://www.monografias.com/trabajos5/matlab/matlab.shtml](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-34-320.jpg)














![- 51 -
Tabla 10 Características eléctricas del módulo XBee
Fuente: http://www.rev-ed.co.uk/docs/xbe001.pdf
Tabla 11 Distribución de pines del módulo XBEE PRO
Pin # Name Direction Description
1 VCC - Power supply
2 DOUT Output UART Data Out
3 DIN / CONFIG Input UART Data In
4 DO8* Output Digital Output 8
5 Input Module Reset (reset pulse must be at
RESET
least 200 ns)
6 Output PWM Output 0 / RX Signal Strength
PWM0 / RSSI
Indicator
7 PWM1 Output PWM Output 1
8 [reserved] - Do not connect
9 DTR / Input Pin Sleep Control Line or Digital Input 8
SLEEP_RQ /
DI8
10 GND - Ground
11 AD4 / DIO4 Either Analog Input 4 or Digital I/O 4
12 Either Clear-to-Send Flow Control or Digital I/O
CTS / DIO7
7
13 ON / SLEEP Output Module Status Indicator
14 VREF Input Voltage Reference for A/D Inputs
15 Associate / AD5 Either Associated Indicator, Analog Input 5 or
/ DIO5 Digital I/O 5
16 RTS / AD6 / Either Request-to-Send Flow Control, Analog
DIO6 Input 6 or Digital I/O 6
17 AD3 / DIO3 Either Analog Input 3 or Digital I/O 3
18 AD2 / DIO2 Either Analog Input 2 or Digital I/O 2
19 AD1 / DIO1 Either Analog Input 1 or Digital I/O 1
20 AD0 / DIO0 Either Analog Input 0 or Digital I/O 0
Fuente: http://www.rev-ed.co.uk/docs/xbe001.pdf](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-51-320.jpg)

























![- 77 -
Utilizando botón Dibujar Trayectoria, accederemos a paint, con la línea de comando:
winopen('C:WINDOWSsystem32mspaint.exe');
Esta línea de comando permite saltar a una ubicación especificada en el pad, en este
caso accederemos a la aplicación paint para en ella dibujar la trayectoria que
necesitamos luego manipular, luego de dibujar la trayectoria se guarda el dibujo
realizado con las respectivas características, es posible también modificar las
características de color en escala de grises del grafico en matlab con la siguiente
instrucción.
A=A(:,:,1);
Mediante el botón Actualizar, se carga a la pantalla la imagen dibujada, antes de
proceder a que el prototipo realice su tarea.
La gráfica dibujada en Paint, se obtiene en Matlab como una matriz de datos con el
siguiente comando: A=double(imread('C:Documents and SettingsFernanda
BolañosEscritorioPROGRAMASfinal matlabmatriz.bmp','bmp'));
Realizamos una consulta a la matriz de modo que podamos obtener solo los datos
menores a uno, esto es solo para obtener las coordenadas de la línea negra de la
trayectoria dibujada, en este caso se almacenarán en los vectores i y j, como se indica
a continuación: [i,j]= find(A<1);
Se procederá inmediatamente a configurar el puerto serial que es por donde se
enviarán los datos, con los siguientes comandos:
s = serial('COM5');
set(s,'BaudRate',9600,'DataBits',8,'Parity','none','StopBits',1,'FlowControl','none')
set(s,'OutputBufferSize',length(y)*8);](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-77-320.jpg)


![- 80 -
ADCON1=7 ; digitalice el puerto A
i var byte
j var byte
f var byte
x var byte
k var byte
r var byte
val var byte
;DATOS VAR BYTE [2] ; variable DATOS de tamaño de 255
;DATOS VAR BYTE
DATOS1 var byte
MOTOR_D_ADE VAR PORTB.2
MOTOR_D_TRAS VAR PORTB.6
MOTOR_I_ADE VAR PORTB.3
MOTOR_I_TRAS VAR PORTB.7
datos var byte [20]
;eeprom 0,[ ]
trisb=%0
portb=%00000000
trisc=%10000000
portc=%00000000
inicio:
for k=1 to 20
HSERIN[DATOS[k]]](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-80-320.jpg)
![- 81 -
if datos[k]="." then
k=21
endif
next
For r=1 to 6
IF datos[r]="1" THEN
r=r+1
FOR f=1 to datos[r]
gosub adelante
next
endif
if datos[r]="2" then
r=r+1
gosub noventader
FOR f=1 to datos[r]
gosub adelante
next
gosub noventaizq
endif
if datos[r]="3" then
r=r+1
gosub derecha
FOR f=1 to datos[r]
gosub adelante
next](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-81-320.jpg)
![- 82 -
gosub izquierda
endif
if datos[r]="4" then
r=r+1
gosub izquierda
FOR f=1 to datos[r]
gosub adelante
next
gosub derecha
endif
if datos[r]="5" then
r=r+1
gosub noventaizq
FOR f=1 to datos[r]
gosub adelante
next
gosub noventader
endif
if datos[r]="6" then
r=r+1
gosub cientocho
FOR f=1 to datos[r]
next
endif
if datos[r]="7" then
r=r+1
gosub dossetenta](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-82-320.jpg)
![- 83 -
FOR f=1 to datos[r]
gosub adelante
next
endif
next
gosub cientocho
goto inicio
adelante:
for i=1 to 20000
portb=%01000100
pauseus 2200
portb=%10001000
pauseus 900
portb=%00000000
next
return
izquierda:
for i=1 to 10000
portb=%01000100
pauseus 2200
portb=%10001000
pauseus 2200
portb=%00000000
next
return
atras:
for i=1 to 20000](https://image.slidesharecdn.com/indice-111115190541-phpapp01/85/Indice-83-320.jpg)












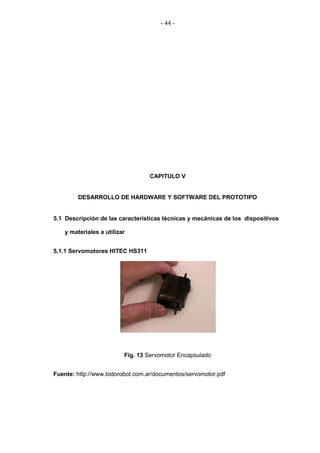
Este documento describe la introducción a la robótica y su historia. En 3 oraciones: Introduce el tema de la robótica y su necesidad para reemplazar al ser humano en trabajos peligrosos o monótonos. Explica la clasificación de los robots según su área de aplicación como robótica industrial, de servicio e inteligente. Describe brevemente la historia de la robótica y algunos robots importantes a través de los años.






















































