Este documento resume las propiedades fundamentales de la transformada z. En primer lugar, define la transformada z como una suma de potencias de una variable compleja z multiplicada por los valores de una señal discreta x[n]. Luego, explica que la transformada z es equivalente a la transformada de Fourier discreta cuando z está en el círculo unitario. Por último, detalla algunas propiedades clave como la región de convergencia y métodos para calcular la transformada z inversa.
![LaTransformadaz
La Transformada z
Como se vio anteriormente, para un sistema discreto lineal e invariante en el tiempo (LTI) con la
respuesta al impulso h[n], la respuesta y[n] del sistema a una entrada exponencial compleja de la
forma 𝒛𝒏
es
donde
para 𝒛 = 𝒆𝒋𝝎
con ω (es decir, con |z| = 1), la sumatoria de la ecuación (10.2) corresponde a la
transformada de Fourier de tiempo discreto de h[n]. De manera más general, cuando |z| no está
restringida a la unidad, la sumatoria se conoce como la transformada z de h[n].
La transformada z de una señal discreta general x[n] se define como
donde z es una variable compleja.](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-2-320.jpg)
![LaTransformadaz
Por conveniencia, la transformada z de x[n] se denota algunas veces como Z{x[n]} y la relación entre
x[n] y su transformada z se indica como
Anteriormente examinamos varias relaciones importantes entre la transformada de Laplace y la
transformada de Fourier para señales continuas. En forma similar, pero no idéntica, hay un gran
número de relaciones importantes entre la transformada z y la transformada de Fourier de tiempo
discreto. Para explorar estas relaciones, expresemos la variable compleja z en forma polar como
Siendo r la magnitud de z y ω su ángulo. En términos de r y ω, la ecuación (10.3) pasa a ser
o, de manera equivalente,](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-3-320.jpg)
![LaTransformadaz
A partir de la ecuación (10.6) vemos que 𝑿(𝒓𝒆𝒋𝝎
) es la transformada de Fourier de la secuencia x[n]
multiplicada por una exponencial 𝒓−𝒏
; esto es,
La exponencial que pondera a x[n] puede ser creciente o decreciente al incrementarse n,
dependiendo de si r es mayor que o menor que la unidad. En particular, podemos observar que, para
r = 1 o, de forma equivalente |z| = 1, la ecuación (10.3) se reduce a la transformada de Fourier; es
decir,
La relación entre la transformada z y la transformada de Fourier para señales discretas se asemeja
mucho al análisis correspondiente para señales continuas, pero con algunas diferencias importantes.
En el caso continuo, la transformada de Laplace se reduce a la transformada de Fourier cuando la
parte real de la variable transformada es cero. Si interpretamos lo anterior en términos del plano s,
esto significa que la transformada de Laplace se reduce a la transformada de Fourier sobre el eje
imaginario (es decir, para s = jω. En contraste, la transformada z se reduce a la transformada de
Fourier discreta cuando la magnitud de la variable de transformación z es unitaria (es decir, para 𝒛 =
𝒆𝒋𝝎
). Por lo tanto, la transformada z se reduce a la transformada de Fourier sobre un contorno del
plano complejo z que corresponde a un círculo con radio unitario, como se indica en la figura 10.1. El
círculo en el plano z se conoce como el círculo unitario, y en el análisis de la transformada z juega un
papel similar al que desempeña el eje imaginario en el plano s para la transformada de Laplace.](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-4-320.jpg)
![LaTransformadaz
De la ecuación (10.7) vemos que para la convergencia de la transformada z requerimos que la
transformada de Fourier de 𝒙[𝒏]𝒓−𝒏
converja. Para cualquier secuencia específica x[n], esperaríamos
que esta convergencia ocurriera para algunos valores de r pero no para otros. En general, la
transformada z de una secuencia lleva asociado un rango de valores de z para el cual X(z) converge.
Al igual que con la transformada de Laplace, este rango de valores se conoce como la región de
convergencia (ROC). Si la ROC incluye el circulo unitario, entonces la transformada de Fourier
también converge.
Para ilustrar la transformada z y la región de convergencia asociada, examinemos varios ejemplos.](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-5-320.jpg)



![LaTransformadaz
Comparando las ecuaciones (10.9) y (10.11), así como las figuras 10.2 y 10.3, vemos que la expresión
algebraica de X(z) y el diagrama de polos y ceros correspondiente son idénticos en los ejemplos 10.1
y 10.2, y la transformada Z difiere sólo en sus regiones de convergencia. Por lo tanto, al igual que con
la transformada de Laplace, la especificación de la transformada z requiere tanto de la expresión
algebraica como de la región de convergencia. Asimismo, en ambos ejemplos las secuencias fueron
exponenciales y las transformadas z resultantes fueron racionales. De hecho, como sugiere el
próximo ejemplo, X(z) será racional siempre que x[n] sea una combinación lineal de exponenciales
reales o complejas:](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-9-320.jpg)




![LaTransformadaz
La Región de Convergencia de la Transformada z
A continuación, exploraremos varias de las propiedades de la región de convergencia para la
transformada z. Cada una de las siguientes propiedades y su justificación son muy semejantes a las
correspondientes propiedades de la ROC de la transformada de Laplace. Se deja al estudiante el
análisis de las comprobaciones de las mismas, presentadas en el libro de texto.
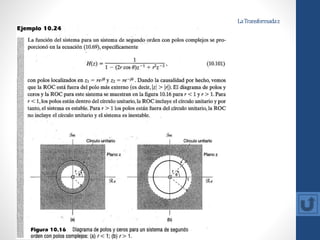
Esta propiedad se ilustra en la figura 10.6, y se desprende del hecho de que la ROC consiste de
aquellos valores de 𝒛 = 𝒓𝒆𝒋𝝎
para los cuales 𝒙[𝒏]𝒓−𝒏
tiene una transformada de Fourier que
converge. Esto es, la ROC de la transformada z de x[n] consiste de los valores de z para los cuales
𝒙[𝒏]𝒓−𝒏
es absolutamente sumable:](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-14-320.jpg)












![LaTransformadaz
o, moviendo el factor exponencial 𝒓𝒏
dentro de la integral y combinándolo con el término 𝒆𝒋𝝎𝒏
,
tenemos
Esto es, podemos recuperar x[n] a partir de su transformada z evaluada a lo largo de un contorno
𝒛 = 𝒓𝒆𝒋𝝎
en la ROC, con r fija y una ω variante sobre un intervalo de 2π. Cambiemos ahora la
variable de integración ω a z. Con 𝒛 = 𝒓𝒆𝒋𝝎
y r fija, entonces dz = jr 𝒆𝒋𝝎
dω = jz dω, o dω =
(1/j)𝒛−𝟏
𝒅𝒛. La integración en la ecuación (10.40) se da sobre un intervalo de 2π en ω el cual, en
términos de z, corresponde a una vuelta alrededor del circulo |z| = r. En consecuencia, en términos
de una integración en el plano z, la ecuación (10.40) puede rescribirse como
donde el símbolo ∳ denota la integración alrededor de un contorno circular cerrado en sentido
contrario a las manecillas del reloj, centrado en el origen y con radio r. El valor de r puede escogerse
como cualquier valor para el cual X(z) converge, es decir, cualquier valor tal que el contorno circular
de la integración |z| = r esté en la ROC. La ecuación (10.41) es la expresión formal de la
transformada z inversa y es la contraparte de tiempo discreto de la transformada inversa de Laplace.](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-27-320.jpg)




![LaTransformadaz
de manera que la transformada in versa de X(z) es igual a la suma de las transformadas inversas de
los términos individuales en la ecuación. Si la ROC de X(z) esta fuera del polo en 𝒛 = 𝒂𝒊, la
transformada inversa del término correspondiente en la ecuación (10.55) es 𝑨𝒊𝒂𝒊
𝒏
𝒖[𝒏]. Por otro lado,
si la ROC de X(z) esta dentro del polo en 𝒛 = 𝒂𝒊, la transformada inversa de este termino es
−𝑨𝒊𝒂𝒊
𝒏
𝒖[−𝒏 − 𝟏]. En general, la expansión por fracciones parciales de una transformada racional
puede incluir otros términos además de los de primer orden en la ecuación (10.55). Más adelante,
mencionamos otros pares de transformadas z que pueden usarse en conjunto con las propiedades de
la transformada z que se desarrollarán para extender a transformadas z racionales y arbitrarias el
método de la transformada inversa esbozado anteriormente.
Otro procedimiento muy útil para determinar la transformada z inversa se basa en una expansión en
series de potencias de X(z). Lo que motivó a desarrollar este procedimiento fue la observación de
que la definición de la transformada z proporcionada en la ecuación (10.3) se puede interpretar
como una serie de potencias que involucra potencias de z tanto positivas como negativas. Los
coeficientes de esta serie de potencias son, de hecho, los valores de la secuencia x[n]. Para
demostrar como una expansión en series de potencias puede usarse para obtener la transformada z
inversa, veamos tres ejemplos.](https://image.slidesharecdn.com/latransformadaz-230622114736-80eb525c/85/La-Transformada-Z-pptx-32-320.jpg)