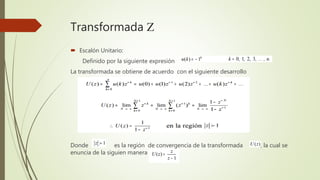
La transformada z es una herramienta matemática fundamental en ingeniería electrónica que permite representar señales de tiempo discreto en el dominio complejo. Incluye propiedades como linealidad, desplazamiento, diferenciación, integración y convolución, y se utiliza para el diseño de sistemas de control digitales. La inversión de la transformada z permite recuperar la secuencia original a partir de su representación transformada.