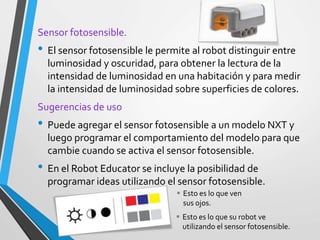
Este documento presenta una comparación de los sensores incluidos en los bloques interactivos Lego Mindstorms NXT. Describe cinco sensores: táctil, acústico, fotosensible, ultrasonido y servomotor interactivo. Para cada sensor, explica brevemente sus funciones y capacidades de detección, así como sugerencias para su programación y uso.



![• Sensor tactil.
El sensor tactil es un interruptor que puede liberarse o presionarse.
• Sugerencias de uso
• Puede agregar el sensor táctil a un modelo NXT y luego programar el comportamiento del
modelo para que cambie cuando se presiona o se libera el sensor táctil.
• En el Robot Educator se incluye la posibilidad de programar ideas utilizando el sensor
tactil.
1. Conecte el sensor táctil al puerto 1 del NXT.
2. Seleccione Ver [View] en la pantalla del NXT.
3. Seleccione el icono tactil. Seleccione el puerto 1.](https://image.slidesharecdn.com/legomindstorms-151107174335-lva1-app6892/85/Lego-mindstorms-4-320.jpg)
![• Sensor Acústico
• El sensor acústico detecta el nivel de decibeles: la suavidad o intensidad de un sonido. El
sensor acústico detecta dB y dBA. dBA: sonidos que el oído humano es capaz de oír. dB:
todos los sonidos existentes, incluyendo los sonidos demasiado altos o bajos para el oído
humano.
• El sensor acústico puede medir los niveles de presión acústica hasta 90 dB, cerca del nivel de
una máquina cortacésped. Las lecturas del sensor acústico en el LEGO® MINDSTORMS®
NXT se muestran en el porcentaje [%] de sonido que el sensor es capaz de leer. A modo de
comparación, entre 4 y 5 % es similar a una sala en silencio y entre 5 y 10 % es cerca del nivel
de alguien hablando a cierta distancia. De 10 a 30 % es una conversación normal cerca del
sensor o música que se reproduce a un nivel normal y un nivel entre 30 y 100 % representa
un intervalo desde personas gritando hasta música reproduciéndose a volúmenes altos.
Estos intervalos se asumen a una distancia de 1 metro aproximadamente entre la fuente del
sonido y el sensor acústico.
• Sugerencias de uso
• Puede agregar el sensor acústico a un modelo NXT y luego programar el comportamiento
del modelo para que cambie cuando se activa el sensor acústico.
• En el Robot Educador se incluye la posibilidad de programar ideas utilizando el sensor
acústico.](https://image.slidesharecdn.com/legomindstorms-151107174335-lva1-app6892/85/Lego-mindstorms-5-320.jpg)