Este manual describe los tres sensores principales del kit LEGO MINDSTORMS NXT 2.0: el sensor táctil, el sensor acústico y el sensor fotosensible. El sensor táctil detecta cuando un botón es presionado o liberado, el sensor acústico mide los niveles de sonido en decibeles, y el sensor fotosensible distingue entre luz y oscuridad y puede medir la intensidad de la luz. El manual también proporciona sugerencias sobre cómo usar los sensores y cómo verificar sus lecturas actuales usando la función "Ver



![VER
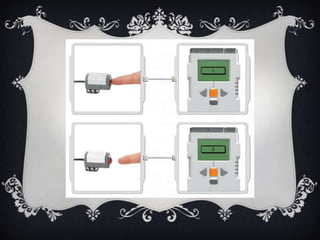
Observe la respuesta actual del sensor táctil en la pantalla utilizando
Ver [View]. Un cero [0] significa que no está presionado el botón del
sensor táctil. Un uno [1] en la pantalla significa que está presionado
el botón del sensor táctil.
Conecte el sensor táctil al puerto 1 del NXT.
Seleccione Ver [View] en la pantalla del NXT.
Seleccione el icono táctil.
Seleccione el puerto 1
Presione y retenga el botón del sensor
táctil mientras observa la pantalla del NXT.
Deberá observar un uno (1) en la pantalla
Ahora libere el botón del sensor táctil.
Deberá observar un cero (0) en la pantalla](https://image.slidesharecdn.com/manualderobticaparte5-130423162936-phpapp02/85/Manual-de-robotica-parte-5-5-320.jpg)
![PRUEBEME
Utilice el programa adecuado en el submenú
Pruébeme para ver rápidamente cómo
funciona.
PROGRAMA DE NXT
También puede utilizar la función Programa
[Program] para crear programas directamente
en el NXT sin utilizar un ordenador.](https://image.slidesharecdn.com/manualderobticaparte5-130423162936-phpapp02/85/Manual-de-robotica-parte-5-7-320.jpg)


![El sensor acústico puede medir los niveles de presión acústica hasta
90 dB, cerca del nivel de una máquina cortacésped. Las lecturas del
sensor acústico en el LEGO® MINDSTORMS® NXT se muestran en
el porcentaje [%] de sonido que el sensor es capaz de leer. A modo de
comparación, entre 4 y 5 % es similar a una sala en silencio y entre 5
y 10 % es cerca del nivel de alguien hablando a cierta distancia. De
10 a 30% es una conversación normal cerca del sensor o música que
se reproduce a un nivel normal y un nivel entre 30 y 100 % representa
un intervalo desde personas gritando hasta música reproduciéndose a
volúmenes altos. Estos intervalos se asumen a una distancia de 1
metro aproximadamente entre la fuente del sonido y el sensor
acústico.](https://image.slidesharecdn.com/manualderobticaparte5-130423162936-phpapp02/85/Manual-de-robotica-parte-5-10-320.jpg)

![VER
Pruebe la capacidad del sensor acústico de medir el volumen acústico
utilizando Ver [View]. Conecte el sensor acústico al puerto 2 del NXT.
Seleccione Ver (View) en la pantalla Haga sonidos en el micrófono (sensor acústico) y
del NXT. observe las lecturas en el NXT. Pruebe también
Seleccione el icono Sonido dB. obtener la lectura de los sonidos a su alrededor: ¿Qué
Seleccione el puerto 2 tan fuertes son las voces más cercanas?](https://image.slidesharecdn.com/manualderobticaparte5-130423162936-phpapp02/85/Manual-de-robotica-parte-5-12-320.jpg)

![VER
Puede probar el sensor fotosensible de diferentes maneras utilizando Ver
(View). Al detectar la luz reflejada se enciende el foco reflector en el
sensor
Detectar la luz reflejada para ver colores
Conecte el sensor fotosensible al NXT.
Seleccione Ver [View] en la pantalla del NXT](https://image.slidesharecdn.com/manualderobticaparte5-130423162936-phpapp02/85/Manual-de-robotica-parte-5-15-320.jpg)