Descargado 77 veces






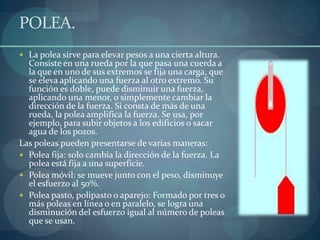

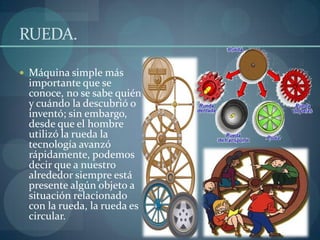
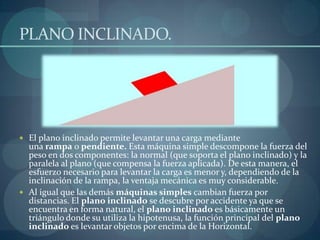




El documento describe las máquinas simples, que son dispositivos utilizados para transformar o compensar fuerzas y facilitar labores. Se detallan diferentes tipos de palancas, poleas y otros ejemplos de máquinas simples, explicando su funcionamiento y ventajas mecánicas. Se concluye que estas máquinas son fundamentales para multiplicar fuerza o cambiar su dirección, haciendo el trabajo más efectivo y seguro.



































































