Este documento trata sobre modelado matemático de sistemas físicos. Explica conceptos fundamentales como variables de flujo y esfuerzo, potencia, energía, elementos de sistemas como fuentes, almacenadores y disipadores de energía. También describe etapas para el modelado como formulación del modelo, verificación y validación, así como métodos de modelado como funciones de transferencia, diagramas de bloques y la técnica de Bond Graph.







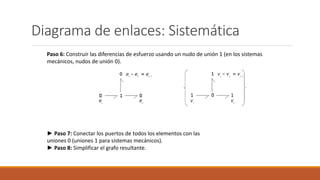
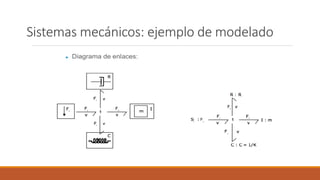
![Procedimiento sistemático para derivar un
modelo con diagramas de enlaces
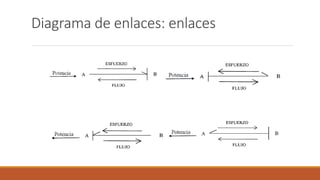
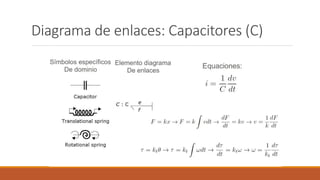
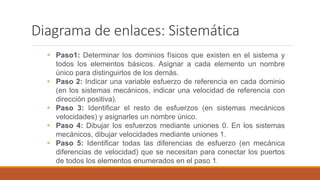
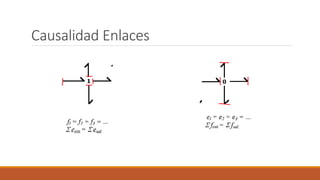
La técnica de los diagramas de enlaces (bond-graph) consiste
en realizar la descripción de un modelo basándose en la
conservación de la energía del sistema. Bond-graph define un
conjunto mínimo de elementos generalizados que pueden ser
usados para modelar el comportamiento de un sistema a través
de diferentes dominios de energía (eléctrico, mecánico, etc.)
[Kamopp y Rosenberg (1968)]. Las conexiones entre elementos
se hacen a través de grafos (flechas) que representan el flujo de
potencia en el sistema.](https://image.slidesharecdn.com/capituloiii2-230914162506-f663d535/85/Modelado-matematico-de-sistemas-fisicos-60-320.jpg)