Los investigadores del MIT y la Universidad del Nordeste han equipado un robot con un nuevo sensor táctil que le permite manipular objetos de forma precisa incluso cuando están posicionados de manera distinta a lo habitual. El sensor, una adaptación de la tecnología GelSight, permite al robot agarrar un cable USB colgando libremente y enchufarlo en un puerto con cuidado y precisión en tiempo real. El robot utilizado para los experimentos fue un Baxter, un modelo de nueva generación capaz de autoadaptarse al entorno.
(PROYECTO) Límites entre el Arte, los Medios de Comunicación y la Informáticavazquezgarciajesusma
En este proyecto de investigación nos adentraremos en el fascinante mundo de la intersección entre el arte y los medios de comunicación en el campo de la informática.
La rápida evolución de la tecnología ha llevado a una fusión cada vez más estrecha entre el arte y los medios digitales, generando nuevas formas de expresión y comunicación.
Continuando con el desarrollo de nuestro proyecto haremos uso del método inductivo porque organizamos nuestra investigación a la particular a lo general. El diseño metodológico del trabajo es no experimental y transversal ya que no existe manipulación deliberada de las variables ni de la situación, si no que se observa los fundamental y como se dan en su contestó natural para después analizarlos.
El diseño es transversal porque los datos se recolectan en un solo momento y su propósito es describir variables y analizar su interrelación, solo se desea saber la incidencia y el valor de uno o más variables, el diseño será descriptivo porque se requiere establecer relación entre dos o más de estás.
Mediante una encuesta recopilamos la información de este proyecto los alumnos tengan conocimiento de la evolución del arte y los medios de comunicación en la información y su importancia para la institución.
Índice del libro "Big Data: Tecnologías para arquitecturas Data-Centric" de 0...Telefónica
Índice del libro "Big Data: Tecnologías para arquitecturas Data-Centric" de 0xWord escrito por Ibón Reinoso ( https://mypublicinbox.com/IBhone ) con Prólogo de Chema Alonso ( https://mypublicinbox.com/ChemaAlonso ). Puedes comprarlo aquí: https://0xword.com/es/libros/233-big-data-tecnologias-para-arquitecturas-data-centric.html
En este documento analizamos ciertos conceptos relacionados con la ficha 1 y 2. Y concluimos, dando el porque es importante desarrollar nuestras habilidades de pensamiento.
Sara Sofia Bedoya Montezuma.
9-1.
(PROYECTO) Límites entre el Arte, los Medios de Comunicación y la Informáticavazquezgarciajesusma
En este proyecto de investigación nos adentraremos en el fascinante mundo de la intersección entre el arte y los medios de comunicación en el campo de la informática.
La rápida evolución de la tecnología ha llevado a una fusión cada vez más estrecha entre el arte y los medios digitales, generando nuevas formas de expresión y comunicación.
Continuando con el desarrollo de nuestro proyecto haremos uso del método inductivo porque organizamos nuestra investigación a la particular a lo general. El diseño metodológico del trabajo es no experimental y transversal ya que no existe manipulación deliberada de las variables ni de la situación, si no que se observa los fundamental y como se dan en su contestó natural para después analizarlos.
El diseño es transversal porque los datos se recolectan en un solo momento y su propósito es describir variables y analizar su interrelación, solo se desea saber la incidencia y el valor de uno o más variables, el diseño será descriptivo porque se requiere establecer relación entre dos o más de estás.
Mediante una encuesta recopilamos la información de este proyecto los alumnos tengan conocimiento de la evolución del arte y los medios de comunicación en la información y su importancia para la institución.
Actualmente, y debido al desarrollo tecnológico de campos como la informática y la electrónica, la mayoría de las bases de datos están en formato digital, siendo este un componente electrónico, por tanto se ha desarrollado y se ofrece un amplio rango de soluciones al problema del almacenamiento de datos.
Inteligencia Artificial y Ciberseguridad.pdfEmilio Casbas
Recopilación de los puntos más interesantes de diversas presentaciones, desde los visionarios conceptos de Alan Turing, pasando por la paradoja de Hans Moravec y la descripcion de Singularidad de Max Tegmark, hasta los innovadores avances de ChatGPT, y de cómo la IA está transformando la seguridad digital y protegiendo nuestras vidas.
Es un diagrama para La asistencia técnica o apoyo técnico es brindada por las compañías para que sus clientes puedan hacer uso de sus productos o servicios de la manera en que fueron puestos a la venta.
1. Lunes, 29 septiembre 2014
Robótica
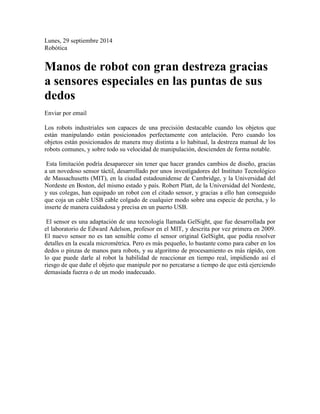
Manos de robot con gran destreza gracias a sensores especiales en las puntas de sus dedos
Enviar por email
Los robots industriales son capaces de una precisión destacable cuando los objetos que están manipulando están posicionados perfectamente con antelación. Pero cuando los objetos están posicionados de manera muy distinta a lo habitual, la destreza manual de los robots comunes, y sobre todo su velocidad de manipulación, descienden de forma notable.
Esta limitación podría desaparecer sin tener que hacer grandes cambios de diseño, gracias a un novedoso sensor táctil, desarrollado por unos investigadores del Instituto Tecnológico de Massachusetts (MIT), en la ciudad estadounidense de Cambridge, y la Universidad del Nordeste en Boston, del mismo estado y país. Robert Platt, de la Universidad del Nordeste, y sus colegas, han equipado un robot con el citado sensor, y gracias a ello han conseguido que coja un cable USB cable colgado de cualquier modo sobre una especie de percha, y lo inserte de manera cuidadosa y precisa en un puerto USB.
El sensor es una adaptación de una tecnología llamada GelSight, que fue desarrollada por el laboratorio de Edward Adelson, profesor en el MIT, y descrita por vez primera en 2009. El nuevo sensor no es tan sensible como el sensor original GelSight, que podía resolver detalles en la escala micrométrica. Pero es más pequeño, lo bastante como para caber en los dedos o pinzas de manos para robots, y su algoritmo de procesamiento es más rápido, con lo que puede darle al robot la habilidad de reaccionar en tiempo real, impidiendo así el riesgo de que dañe el objeto que manipule por no percatarse a tiempo de que está ejerciendo demasiada fuerza o de un modo inadecuado.
2. Armado con el sensor GelSight, un robot puede coger el extremo de un cable USB colgando libremente y enchufarlo en un puerto USB. (Foto: Melanie Gonick / MIT)
El robot escogido para los experimentos fue uno del modelo Baxter. De este modelo ya hemos hablado en otras ocasiones desde NCYT de Amazings. Baxter pertenece a una nueva generación de robots industriales que se autoadaptan al entorno (http://noticiasdelaciencia.com/not/8063/). El robot es una creación de la empresa Rethink Robotics de Boston, a través de la cual el veterano robotista Rodney Brooks sigue haciendo uso de su mente creativa y visionaria. A Brooks se le conoce por su labor pionera desarrollando robots insectoides en el MIT, y más tarde por el éxito de los robots domésticos de la empresa iRobot cofundada por él, entre los cuales figura el famoso robot aspiradora Roomba.