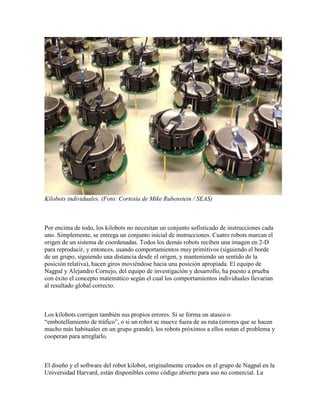
Los investigadores de la Universidad de Harvard crearon una manada de 1024 robots capaces de autoorganizarse para formar figuras complejas siguiendo instrucciones sencillas. Cada robot pequeño y simple se comunica con los demás a través de luces infrarrojas para coordinarse y corregir errores de forma colectiva. Este logro representa un avance hacia la inteligencia artificial colectiva mediante el uso de comportamientos individuales simples que dan como resultado conductas grupales complejas.