
Recomendados
Más contenido relacionado
Similar a PPT-Física-II-medio-S4.pptx
Similar a PPT-Física-II-medio-S4.pptx (20)
Más de NildaRecalde
Más de NildaRecalde (13)
Último
Último (20)
PPT-Física-II-medio-S4.pptx
- 1. UNIDADES DE MEDIDA DEL MOVIMIENTO, VECTORES Y MOVIMIENTO DE VELOCIDAD CONSTANTE PROFESORA: ROXANA REINOSO CARO MATERIAL DE APOYO 2° MEDIO FÍSICA GUÍA SEMANA 4
- 2. Aprendizajes esperados • Transformar unidades. • Despejar ecuaciones básicas. • Conocer las características principales de un gráfico. • Conocer las coordenadas cartesianas y realizar un gráfico con estas. • Analizar los gráficos lineales y cuadráticos. • Reconocer las magnitudes escalares. • Reconocer las magnitudes vectoriales. • Aplicar operaciones entre vectores. • Caracterizar el movimiento. • Caracterizar el movimiento rectilíneo uniforme (MRU). • Interpretar información en gráficos.
- 3. 1. Unidades de medida Equivalencia entre unidades Equivalencia entre unidades de longitud Unidad Símbolo Medida en metros kilómetro km 1.000 hectómetro hm 100 decámetro dam 10 metro m 1 decímetro dm 0,1 centímetro cm 0,01 milímetro mm 0,001 x 1.000 ÷ 100 Este procedimiento también es válido para transformar unidades de masa.
- 4. 1. Unidades de medida Equivalencia entre unidades de tiempo Unidad Medida en horas Medida en minutos Medida en segundos hora [h] 1 60 3.600 minutos [min] 1 60 segundo [s] 1 60 1 3600 1 60 1 Equivalencia entre unidades
- 5. 1. Unidades de medida Una conversión muy útil Si necesitamos pasar desde a o viceversa, podemos seguir este sencillo procedimiento. m s km h x 3,6 m s km h ÷ 3,6 Equivalencia entre unidades m s km h
- 6. 2. Resolución de ecuaciones simples Ecuación: Igualdad en la que intervienen uno o más términos, llamados incógnitas. Es decir, es una igualdad entre expresiones algebraicas.
- 7. 3. Gráficos Representación gráfica Por ejemplo, grafiquemos la información del siguiente cuadro: 3 6 9 3 2 1 0 d[m] t[s] t : tiempo en [s] (asociado al eje de las abscisas) Eje vertical, eje de las ordenadas. Eje horizontal, eje de las abscisas. t [segundos] d [metros] 0 0 3 1 6 2 9 3 Primero, asignamos las variables a cada eje: d : distancia en [m] (asociado al eje de las ordenadas)
- 8. 3 6 9 3 2 1 0 d[m] t[s] 3. Gráficos Representación gráfica Para graficar, asociamos la información a una serie de puntos. Los puntos o datos se ubican en pares, llamados “pares ordenados”. El punto (0,0) es el origen del sistema de coordenadas. t [segundos] d [metros] 0 0 3 1 6 2 9 3
- 9. 3. Gráficos Representación gráfica Finalmente, unimos todos los puntos con una línea, que puede ser recta o curva, dependiendo de la relación que exista entre las variables graficadas. En este caso, es una recta. En la práctica, basta dibujar unos pocos puntos y unirlos convenientemente para obtener, con una buena aproximación, el gráfico. De la información entregada en el gráfico se ve que, por cada 3 segundos, el móvil avanza 1 metro; es decir, la relación entre las variables es muy “ordenada”. Esta relación es representada en el gráfico por una línea recta. 3 6 9 3 2 1 0 d[m] t[s] Este tipo de gráficos recibe el nombre de “gráfico lineal”
- 10. 3. Gráficos Gráficamente, corresponde a la inclinación que tiene una recta respecto al eje horizontal. Tenemos cuatro tipos de gráficos: Pendiente Representación gráfica a) Con pendiente positiva. b) Con pendiente negativa. c) Sin pendiente o pendiente nula. d) Con pendiente infinita.
- 11. a = pendiente de la recta 3. Gráficos • Análisis visual de una función lineal de primer grado i. Si tenemos una expresión del tipo y = a · x, y tenemos graficada y v/s x (una variable de cada lado de la igualdad), el valor del término no graficado “a” corresponde al valor de la pendiente de la recta. Análisis directo de gráficos ii. Si tenemos una expresión del tipo y = a · x, y tenemos graficada a v/s x (las variables del mismo lado de la igualdad), el valor del término no graficado “y” corresponde al valor del área bajo la recta de la gráfica. y = área bajo la recta de la gráfica
- 12. 3. Gráficos Si la función tiene término independiente, o sea, si es de la forma y = ax + b donde a y b son constantes, su intercepto sobre el eje de las “y” es igual al término independiente b (coeficiente de posición) y el termino “a”, que acompaña a la variable “x”, representa el valor de la pendiente. Por ejemplo: Sea TK : temperatura kelvin TC : temperatura Celsius Si la ecuación que vincula ambas temperaturas es TK = TC + 273, entonces, ¿cuál es el gráfico que representa mejor esta relación? TK = TC + 273 → ec. de la recta del tipo y = ax + b, con: a = 1 (pendiente positiva) y coeficiente de posición b = 273. Con esta información, el gráfico sería Análisis directo de gráficos 273 TK TC
- 13. 3. Gráficos • Análisis visual de una función cuadrática o de segundo grado. Una función de segundo grado es aquella que presenta alguna de sus variables con exponente 2. Por ejemplo: y = x2 El gráfico que genera una expresión cuadrática es una curva llamada parábola. Análisis directo de gráficos 2 1 6 4 5 2 f x t t x y x y
- 14. 3. Gráficos Ejemplo: Graficar la expresión: d = t2, correspondiente a la distancia recorrida por un móvil en el tiempo. Primero, damos valores al tiempo t, obteniendo valores para d, y registramos la información en una tabla. Posteriormente, traspasamos la información a pares ordenados y la llevamos al plano cartesiano, obteniendo el siguiente gráfico: Análisis directo de gráficos t d = t2 0 d = 02 = 0 1 d = 12 = 1 2 d = 22 = 4 3 d = 32 = 9 4 d = 42 = 16 Del gráfico podemos observar que, a medida que t va aumentando ordenadamente, de 1 en 1, d aumenta cuadráticamente, es decir, de una forma “desordenada”. Esta relación entre las variables se representa en el gráfico con una curva (brazo de parábola). 0 1 2 3 4 1 4 9 16 t d
- 15. 4. Magnitudes escalares Son aquellas que quedan claramente definidas por un número y una unidad de medida, es decir, los escalares solo poseen módulo. Algunas magnitudes escalares son: la longitud, el tiempo, la masa, la temperatura, etc. Ejemplos 3 [metros], 5 [horas], 1 [kilogramo], 10 [ºC]. En física se estudian magnitudes escalares como: trabajo, energía, temperatura y masa, entre otras. Definición
- 16. 5. Magnitudes vectoriales Los vectores son magnitudes que contienen una mayor cantidad de información que los escalares, y pueden ser representados por una flecha. Poseen tres características: módulo, dirección y sentido. Algunas magnitudes vectoriales son: la velocidad, la aceleración y la fuerza. Ejemplo Un automóvil viaja a , en dirección norte - sur, sentido sur (vector velocidad). 100 km h Línea sobre la que se encuentra el vector Dirección Representado por la punta de la flecha Sentido Representación gráfica del vector velocidad N S Longitud de la flecha; indica cantidad o intensidad de la magnitud Módulo 100 h km Definición
- 17. 5. Magnitudes vectoriales Dos vectores son iguales si sus características son iguales, es decir, si poseen igual módulo, dirección y sentido. Formas de expresar un vector Gráficamente x y x a y a a Como par ordenado y x a a a , Mediante los vectores unitarios ˆ ˆ x y a a i a j Igualdad de vectores
- 18. Componentes escalares de un vector La componente en x del vector es: La componente en y del vector es: Por lo tanto, el vector es x y 2 6 x a 1 2 x 2 5 y 1 3 y 2 1 6 2 4 x a x x a a 2 1 5 3 2 y a y y ( , ) (4,2) x y a a a 5. Magnitudes vectoriales Para poder expresar un vector como par ordenado, debemos conocer sus componentes escalares.
- 19. Módulo de un vector El módulo de un vector corresponde a la longitud de la flecha (cuando está representado gráficamente) e indica la cantidad o intensidad de la magnitud que representa. Si tenemos el vector expresado como par ordenado Entonces, su módulo se puede calcular como: 5. Magnitudes vectoriales x y x a y a a ( , ) x y a a a 2 2 x y a a a
- 20. 6. Operaciones con vectores Ponderación de un vector La ponderación es una operación entre un vector y un escalar. Al ponderar un vector, este puede cambiar su módulo y su sentido (dependiendo del valor y signo del escalar), pero nunca cambia su dirección original.
- 21. Suma de vectores Para sumar dos o más vectores, se trasladan paralelamente, de modo que el origen de uno coincida con el extremo del otro. El vector resultante se obtiene uniendo el origen del primer vector con el extremo del último vector de la suma. Por ejemplo, sean los vectores y v u u v u v Para sumarlos hacemos u v v u v u u v v u La suma es una operación conmutativa, es decir, al cambiar el orden de los vectores no se altera el resultado de la suma. 6.Operaciones con vectores
- 22. Resta de vectores Restar dos vectores es equivalente a sumar al primer vector el inverso aditivo del segundo. u v u v v u La resta no es una operación conmutativa, es decir, al cambiar el orden de los vectores se altera el resultado de la resta. u v v u v u v u Por ejemplo, hagamos la resta : u v 6. Operaciones con vectores
- 23. Operatoria algebraica de vectores La suma de vectores es una operación muy fácil de realizar, cuando se trabaja con sus componentes algebraicas; basta sumar las componentes en x entre sí y hacer lo mismo con las componentes en y. El procedimiento para la resta de vectores es equivalente. Ejemplo Sean los vectores y . La suma será (4, 2) k ( 6,3) m k m (4, 2) ( 6,3) (4 6, 2 3) ( 2,1) k m 6. Operaciones con vectores
- 24. Síntesis de la clase MAGNITUDES Módulo Cantidad más unidad de medida Solo poseen Escalares Tiempo Longitud Masa Algunas son C.G.S. M.K.S. Poseen Unidades Vectoriales Poseen Sentido Dirección Módulo Algunas son Fuerza Aceleración Velocida d
- 25. 7. El movimiento La posición de un cuerpo es el lugar que ocupa en un sistema de referencia, en un instante dado. El movimiento es el cambio de posición que experimenta un cuerpo a través del tiempo, respecto a un sistema arbitrario de referencia. xi =0[m] xf =20[m] xf =40[m] 10 20 30 40 Punto de referencia [m] 0
- 26. 7. El movimiento El movimiento es relativo. Depende del sistema de referencia. Clasificación de los movimientos según el sistema de referencia • Movimiento relativo: El origen del sistema de referencia con el cual se observa el movimiento está, a su vez, en movimiento. • Movimiento absoluto: El origen del sistema de referencia con el cual se observa el movimiento está en reposo. Utilizaremos solo sistemas de referencias absolutos para nuestro estudio.
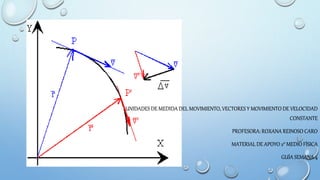
- 27. 7. El movimiento Trayectoria A B Existen dos conceptos que debemos entender para comprender el movimiento: Trayectoria: Es la curva imaginaria que va trazando un cuerpo al moverse. La longitud de la trayectoria se denomina camino o distancia recorrida. Desplazamiento: Es el vector que une la posición inicial con la final de un movimiento.
- 28. 7. El movimiento Movimiento rectilíneo: La trayectoria que describe el móvil es una línea recta. Clasificación de los movimientos según su trayectoria Ejemplo: La caída de una manzana desde un árbol. Movimiento curvilíneo: La trayectoria que describe el móvil es una curva. Ejemplo: El movimiento de la jabalina al ser lanzada.
- 29. 7. El movimiento Rapidez media Magnitud escalar que relaciona la distancia recorrida y el tiempo demorado. Velocidad media Magnitud vectorial que relaciona el cambio de posición (desplazamiento) y el tiempo demorado. empleado tiempo ento desplazami Velocidad empleado tiempo recorrida distancia Rapidez t d V s cm S G C s m I S : . . . : . . d y velocida rapidez para Unidades
- 30. 8. Movimiento rectilíneo uniforme (MRU) Se caracteriza por ser un movimiento con velocidad constante y trayectoria rectilínea. El móvil recorre distancias iguales en tiempos iguales.
- 31. 8. Movimiento rectilíneo uniforme (MRU) Este movimiento se rige por la siguiente ecuación, llamada itinerario. Donde xf : posición final xi : posición inicial v : rapidez del móvil t : tiempo empleado · f i x x v t Si el móvil parte del origen xi = 0, la posición final coincide con la distancia recorrida (xf = d), con lo cual la ecuación nos queda: t d v
- 32. 8. Movimiento rectilíneo uniforme (MRU) Gráfico posición / tiempo La línea recta ascendente o descendente indica que el móvil recorre distancias iguales en intervalos iguales. Comportamiento gráfico de un MRU · f i x x v t x[m] t[s] xi xi =0 xi · f x v t · f i x x v t
- 33. 8. Movimiento rectilíneo uniforme (MRU) Gráfico velocidad / tiempo La línea recta horizontal indica que la velocidad es constante en el tiempo. El área bajo la curva representa la distancia recorrida por el móvil en el intervalo de tiempo. Comportamiento gráfico de un MRU V[m] t[s] -v Área = distancia recorrida
- 34. Síntesis de la clase MOVIMIENTO Desplazamiento Puede experimentar un Se clasifica según Trayectoria: - Rectilíneo - Curvilíneo Sistema de referencia: - Relativo - Absoluto Trayectoria rectilínea MR U Velocidad constante Cambio de posición en el tiempo Es el El móvil Distancia Trayectoria Marca una Recorre una Rapidez constante Recorre distancia iguales en tiempos iguales El móvil