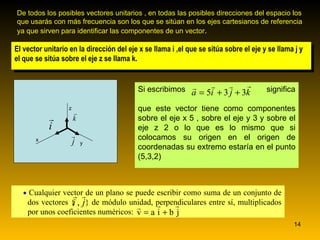
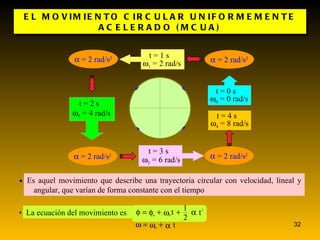
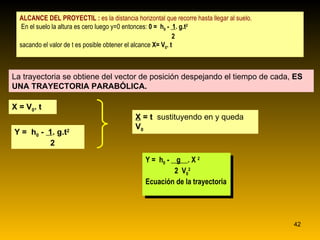
Este documento trata sobre conceptos básicos de cinemática. Explica que el movimiento es relativo y depende del sistema de referencia elegido. Define conceptos como trayectoria, posición, desplazamiento y velocidad. También describe las unidades fundamentales del Sistema Internacional (metro, kilogramo, segundo) y cómo se representan y suman vectores.