Este documento presenta un resumen del tema 5 de cálculo vectorial. Incluye una lista de alumnos participantes, el temario a cubrir que comprende conceptos como integrales dobles, iteradas, en coordenadas rectangulares y polares, integrales triples, campos vectoriales y la integral de línea. También presenta ejemplos para calcular áreas e integrales dobles.




![EJEMPLO 3.-
Resuelve la siguiente integral doble.
0
1
√𝑥
1+𝑥
2𝑥𝑦𝑑𝑦 }𝑑𝑥
= 0
1
{ √𝑥
1+𝑥
2𝑥𝑦 𝑑𝑦 }𝑑𝑥
= 0
1
{2𝑥
𝑦2
2
]
1 + 𝑥
√𝑥
}dx
= 0
1
{𝑥𝑦2|
1 + 𝑥
√𝑥
}𝑑𝑥 = 0
1
{𝑥 (1 + 𝑥)2−𝑥 𝑥 2}𝑑𝑥
= 0
1
𝑥 1 + 2𝑥 + 𝑥2
− 𝑥 ∗ 𝑥 𝑑𝑥 = 0
1
𝑥 + 22
+ 𝑥3
− 𝑥2
𝑑𝑥
= 0
1
(𝑥 + 𝑥2 + 𝑥3) 𝑑𝑥 =
𝑥2
2
+
𝑥3
3
+
𝑥4
4
|
1
0
=
1
2
+
1
3
+
1
4
− 0 =
13
12](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-8-320.jpg)
![5.2 INTEGRALES ITERADAS.
Una integral iterada es una integral evaluada varias veces sobre la misma variable (en contraste
con una integral múltiple, que consiste en un número de integrales evaluadas con respecto a
diferentes variables).
Es importante tener en cuenta en qué posición se dan los límites de las integrales en cuestión para
saber en qué orden se ejecutarán los procesos de integración simple, es decir reconocer si se va a
integrar primero considerando el diferencial dx o el dy o viceversa.
Área de una región en el plano del eje "x“
Si la región R está definida por 𝑎 ≤ 𝑥 ≤ 𝑏 y g1(x)≤ 𝑦 ≤ g2 (x), donde g1(x) y g2 (x) son funciones
continuas en el eje x del intervalo [a,b]. La Región Restá dada por:
A= 𝑎
𝑏
𝑔2(𝑥)
𝑔1(𝑥)
𝑑𝑦𝑑𝑥
Área de una región en el plano del eje “y”
Si la región r está definida por ∁≤ 𝑦 ≤ 𝑑 y h1 (x)≤ 𝑥 ≤ h2 (y) donde h1 (y) y h2 (y) son funciones
continuas en el eje x del intervalo [c,d]. La Región R está dada por:
𝐴 =
𝑐
𝑑
ℎ1
ℎ2
(𝑦)
(𝑦)
𝑑𝑥𝑑𝑦](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-9-320.jpg)
![EJEMPLO 1.-
Calcular la integral iterada = 1
3
0
2
(𝑥𝑦 + 𝑥2
𝑦3
𝑑𝑦 𝑑𝑥
= 0
2
(𝑥𝑦 + 𝑥2 𝑦3)𝑑𝑦 =
𝑥𝑦2
2
+ 𝑥2 𝑦4
4
]
2
0
=
𝑥
2
2 2 − 0 2 +
𝑥2
4
2 4 − 0 4 =
𝑥
2
4 − 0 +
𝑥2
4
16 − 0
=
𝑥
2
4 +
𝑥2
4
10 = 2𝑥 + 4𝑥2
= 1
3
(2𝑥 + 4𝑥2)𝑑𝑥 = 2
𝑥2
2
+ 4
𝑥3
3
]
3
1
= 𝑥2 +
4
3
𝑥3]
3
1
=[(3)2
−(1)2
]+
4
3
3 3
− 1 3
= 9 − 1 +
4
3
27 − 1 = 8 +
4
3
26 = 8 +
104
3
=
24+104
3
=
128
3](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-10-320.jpg)
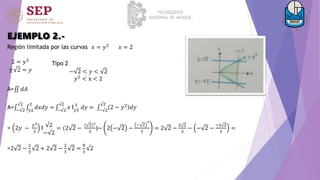
![EJEMPLO 2.-
= 1
3
1
2
6𝑥𝑦2
−
4𝑥
𝑦
𝑑𝑦𝑑𝑥
= 1
2
(6𝑥𝑦2 −
4𝑥
𝑦
𝑑𝑦 = 6𝑥
𝑦3
3
− 4𝑥𝐿𝑛𝑙𝑦]
2
1
= 2𝑥𝑦3 − 4𝑥 𝐿𝑛𝑙𝑦|]
2
1
=2𝑥 2 3 − 1 3 − 4𝑥 𝐿𝑛2 − 𝐿𝑛1 = 2𝑥 8 − 1 − 4𝑥 𝐿𝑛2 = 14𝑥 − 4𝑥 𝐿𝑛2
= 1
3
14𝑥 − 4𝑥 𝐿𝑛2 𝑑𝑥 = 14
𝑥2
2
− 4 𝐿𝑛
2𝑥2
2
]
3
−1
= 7𝑥2
− 2𝐿𝑛 2𝑥2
]
3
1
=7 3 2
− −1 2
− 2𝐿𝑛2 3 3
− −1 2
= 7 9 − 1 − 2 𝐿𝑛 2 9 − 1
=56 − 16 𝐿𝑛2 = 44.91](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-11-320.jpg)
![EJEMPLO 3.-
. −1
2
2𝑥2−2
𝑥2+𝑥
𝑥𝑑𝑦 𝑑𝑥
= 2𝑥2−2
𝑥2+𝑥
𝑥𝑑𝑦 = 𝑥𝑦] 𝑥2 + 𝑥
2𝑥2
− 2
= 𝑥 [𝑥2 + 𝑥 − (2𝑥2 − 2)]
=𝑥 𝑥2
− 𝑥 − 2𝑥2
+ 2 = 𝑥3
+ 𝑥2
− 2𝑥3
+ 2𝑥 = −𝑥3
+ 𝑥2
+ 2𝑥
1
2
−𝑥3
+ 𝑥2
+ 2𝑥 𝑑𝑥 =
−𝑥4
4
+
𝑥3
3
+ 2
𝑥2
2
]
2
−1
=−
1
4
𝑥4
+
1
3
𝑥3
+ 𝑥2
]
2
−1
= −
1
4
[24
− −1 4
] +
1
3
[ 2 3
− −1 3
] + [22
− (−1)2
]
=-
1
4
16 − 1 +
1
3
8 − −1 + 4 − 1
=−
1
4
∗ 15 +
1
3
9 + 3 = −
15
4
+ 3 + 3 = −
15
4
+ 6
=-
15+24
4
=
9
4](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-12-320.jpg)
![EJEMPLO 1.-
• 0
1
1
2 𝑥𝑒𝑥
𝑦
𝑑𝑦𝑑𝑥 0
1
𝑋𝑒𝑥
𝐿𝑛|2|𝑑𝑥
=𝑥 𝑒𝑥
1
2 1
𝑦
𝑑𝑦 𝐿𝑛|2| 0
1
𝑥𝑒𝑥
𝑑𝑥
=𝑥 𝑒𝑥
𝐿𝑛 𝐿𝑦𝑙 |
2
1
𝑥 𝑒𝑥
=𝑥 𝑒𝑥
𝐿𝑛 2 − 𝐿𝑛 1 1 𝑒𝑥
=𝑥 𝑒𝑥 𝐿𝑛 |2| 0 𝑒𝑥
𝐿𝑛|2|[𝑥𝑒𝑥
− 𝑒𝑥
|
1
0
]
𝐿𝑛 2 1𝑒1 − 𝑒1 − (0𝑒0 − 𝑒0)
𝐿𝑛 2 0 − 0 − 1 = 𝐿𝑛|2|](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-14-320.jpg)

![EJEMPLO 1.-
• 0
𝜋
1
2
3𝑥 + 4𝑦2
𝑑𝐴
= 0
𝜋
1
2
(𝑟𝑐𝑜𝑠𝜃 + 4𝑟2
𝑠𝑒𝑛2
𝜃) 𝑟 𝑑𝑟 𝑑𝜃
= 0
𝜋
1
2
3𝑟2
𝑐𝑜𝑠𝜃 + 4𝑟3
𝑠𝑒𝑛2
𝜃 𝑟𝑑𝑟𝑑𝜃 = 0
𝜋
[3𝑐𝑜𝑠𝜃 1
2
𝑟2
𝑑𝑟 + 4 𝑠𝑒𝑛2
𝜃 1
2
𝑟2
𝑑𝑟𝑑𝜃
= 0
𝜋
[3𝑐𝑜𝑠𝜃
𝑟3
3
+ 4 𝑠𝑒𝑛2𝜃(
𝑟4
4
]|
2
1
𝑑𝜃
= 0
𝜋
[𝑐𝑜𝑠𝜃 23 − 13 + 𝑠𝑒𝑛2𝜃(24 − 14] 𝑑𝜃 = 0
𝜋
(7 cos 𝜃 + 15 𝑠𝑒𝑛𝜃)𝑑𝜃
=7 0
𝜋
𝑐𝑜𝑠𝜃𝑑𝜃 + 15 0
𝜋
𝑠𝑒𝑛2
𝜃𝑑𝜃 = 7𝑠𝑒𝑛𝜃 + 15(
1
2
−
1
2
𝑐𝑜𝑠2𝜃)
=7𝑠𝑒𝑛𝜃 +
15
2
𝜃 −
15
2
cos 2𝜃|
𝜋
0
=7𝑠𝑒𝑛𝜋 +
15
2
𝜋 −
15
2
𝑐𝑜𝑠2𝜋 − 7𝑠𝑒𝑛0 −
15
2
0 +
15
2
𝑐𝑜𝑠2(0)
=
15
2
𝜋 −
15
2
+
15
2
=
15
2
𝜋
𝑥 = 𝑟𝑐𝑜𝑠𝜃
𝑦 = 𝑟𝑠𝑒𝑛𝜃
𝑟2
= 𝑥2
+ 𝑦2
𝑡𝑎𝑛𝜃 =
𝑦
𝑥](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-17-320.jpg)
![EJEMPLO 2.-
• 𝜋
4
𝜋
2
0
√8 1
5+𝑥2+𝑦2 𝑑𝐴
= 𝜋
4
𝜋
2
0
√8 1
5+𝑟2 𝑟𝑑𝑟𝜃
= 𝜋
4
𝜋
2
0
√8 1
𝑢
𝑑𝑢
𝑑𝑥
𝑑𝜃 𝜋
4
𝜋
2
[
1
2 0
√8 𝑑𝑢
𝑢
] 𝑑𝜃 = 𝜋
4
𝜋
2 1
2
𝐿𝑛 5 + 𝑟2 𝜃
0
𝑑𝜃
= 𝜋
4
𝜋
2 1
2
𝐿𝑛 5 + 8 −
1
2
𝐿𝑛 5 + 0 𝑑𝜃 = 𝜋
4
𝜋
2 1
2
( 𝐿𝑛13 − 𝐿𝑛5)𝑑𝜃
=
1
2
𝐿𝑛 13 − 𝐿𝑛5 𝜋
4
𝜋
2
𝑑𝜃 =
1
2
(𝐿𝑛13 − 𝐿𝑛5)(𝜃)
𝜋
2
𝜋
4
=
1
2
𝐿𝑛13 − 𝐿𝑛5
𝜋
2
−
𝜋
4
=
𝜋
8
(𝐿𝑛
13
5
)
𝑟2
= 𝑥2
+ 𝑦2
𝑢 = 5 + 𝑟2
𝑑𝑢 = 2𝑟𝑑𝑟
𝑑𝑢
2𝑥
= 𝑑𝑟
EJEMPLO 3.-
• 𝑥2 + 𝑦2
𝑑𝑥𝑑𝑦
V= 0
2
0
2𝜋
𝑟 𝑟𝑑𝜃𝑑𝑟
V= 0
2
𝑟2𝑑𝑟 0
2𝜋
𝑑𝜃 = 𝑣 = 0
2
𝑟2𝑑𝑟𝜃|
2𝜋
0
=2𝜋 0
2
𝑟2
𝑑𝑟 = 2𝜋
𝑟3
3
|
2
0
=
16
3
𝜋
𝑥2
+ 𝑦2
= 4
0 ≤ 𝑦 ≤ 2
0 ≤ 𝜃 ≤ 2𝜋
𝑟 = 𝑥2 + 𝑦2](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-18-320.jpg)
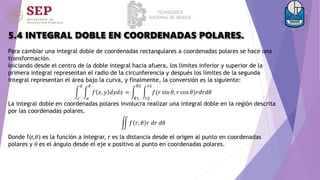
![Hallar el volumen del sólido limitado en el primer octante por los planos coordenados y por el plano
3𝑥 + 2𝑦 + 𝑧 = 6
• 𝑣 = 0
2
0
6−3𝑥
2
6−3𝑥−2𝑦
𝑑𝑧𝑑𝑦𝑑𝑧
= 0
2
0
6−3𝑥
2 6 − 3𝑥 − 2𝑦 𝑑𝑦𝑑𝑥
= 6 − 3𝑥
6−3𝑥
2
− 0 − [(
6−3𝑥
2
) 2 − 02]
=
1
2
(6 − 3𝑥)2
−
1
4
(6 − 3𝑥)2
=
1
4 0
2
(6 − 3𝑥)2𝑑𝑥 =
1
4
(−
1
4
) 6 − 3𝑥 3|
2
0
= −
1
36
6 − 3 2 3 − 6 − 3 0 3 = −
1
36
− −
2
6
= 6𝑢3
EJERCICIO 1.-
(2|
6 − 3𝑥 − 2𝑦
0
= 6 − 3𝑥 − 2𝑦 𝑣 = 6 − 3𝑥
𝑑𝑣 = 3𝑑𝑥
𝑑𝑥 = 𝑑𝑣/−3
}
𝑢2( 𝑑𝑢
−3)
−
1
3
𝑢3
3
→ −
1
9
𝑢3](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-21-320.jpg)
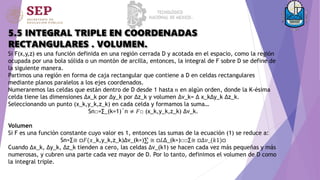
![EJEMPLO 2.-
Hallar el volumen del solido limitado en el primer octante por los planos coordenados y las
superficies.
Sup =𝑧 = 9 − 𝑥2
𝑦 = 9 − 𝑥2
9 − 𝑥2
• 𝑣 = 0
3
0
9−𝑥2
0
9−𝑥2
𝑑𝑧 𝑑𝑦 𝑑𝑧
• 𝑣 = 0
3
0
9−𝑥2
0
9−𝑥2
𝑑𝑧𝑑𝑦𝑑𝑥 → 0
9−𝑥2
𝑑𝑧 = (𝑧|9 − 𝑥2
0
= 9 − 𝑥2
= 0
3
0
9−𝑥2
9 − 𝑥2
𝑑𝑦𝑑𝑥 (9 − 𝑥2
0
9−𝑥2
𝑑𝑦 = 9 − 𝑥2
∗ (𝑦)|9 − 𝑥2
0
= (9 − 𝑥2
)2
= 0
3
9 − 𝑥2
𝑑𝑥 = 0
3
81 − 18𝑥2
+ 𝑥4
𝑑𝑥
=81𝑥 − 6𝑥3 +
1
5
𝑥5|
3
0
= 81 3 − 0 − 6 33 − 0 +
1
5
[35 − 0]
=
648
5
≅ 129.6𝑢3](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-22-320.jpg)
![EJEMPLO 3.-
• 𝑏𝑦 𝑥 = 0, 𝑥 = 1, 𝑦 = 0, 𝑦 = 1, 𝑧 = 0, 𝑎𝑛𝑑 𝑧 = 𝑥𝑦
V= 0
|𝑑𝑣
V= 0
𝑥𝑦
|𝑑𝑧𝑑𝑦𝑑𝑥
V= 0
1
0
1
𝑑𝑦 𝑑𝑥 = 0
1
0
1
𝑥𝑦𝑑𝑦𝑑𝑥
= 0
1 1
2
𝑥𝑦2 1
0
𝑑𝑥 = 0
1 1
2
𝑥 1 2 − 0 2 dx
= 0
1 1
2
𝑥𝑑𝑥 =
1
4
𝑥2 1
0
=
1
4
[ 1 2
− (0)2
]
=
1
4
𝑐𝑢𝑏𝑖𝑐 𝑢𝑛𝑖𝑡 = 0.25 𝑐𝑢𝑏𝑖𝑐 𝑢𝑛𝑖𝑡𝑠](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-23-320.jpg)




![EJEMPLO 1.-
• 𝐹 𝑥, 𝑦 𝑑𝑠
• Datos del problema
X=𝑥 𝑡 . 𝑦 = 𝑡 , 𝑧 = 𝑧 𝑡 𝑟→ 𝑡 = 𝑥 𝑡 𝑖 + 𝑦 𝑡 𝑗 + 𝑧 𝑡 𝑘 𝑎 < 𝑡 > 𝑏
𝑟→(𝑡) = 𝑡, 𝑡2𝑓3) 𝑡 = ∈ [−1,1], 𝑓 = (𝑥, 𝑦, 𝑧) = 𝑓(𝑥𝑦, 𝑦𝑧, 𝑥𝑧)
Solución
• 𝑟→´ 𝑡 = 1,2𝑡, 3𝑡2
• 𝑓 𝑥 𝑡 , 𝑦 𝑡 , 2 𝑡 = 𝑡∗
, 𝑡2
, 𝑡2
∗ 𝑡3
, 𝑡 ∗ 𝑡3
= 𝑡3
, 𝑡5
, 𝑡4
• −1
1
𝑡3, 𝑡5, 𝑡4 . 1,2𝑡, 3𝑡2 𝑑𝑓 = −1
1
𝑡3 + 2𝑡6 + 3𝑡6 𝑑𝑡 = −1
1
𝑡3 + 5𝑡6 𝑑𝑝
• =[
𝑡4
4
+
5𝑡7
7
]=
10
7
F 𝑥, 𝑦 = 𝑥, 𝑦
𝐹(𝑥, 𝑦, 𝑧)=(𝑥2
,𝑦2
, 𝑧2
)](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-30-320.jpg)


![EJEMPLO 3.-
Integral de línea de campos escalares
Para trayectorias r: [a,b]→𝑅𝑛
que satisfagan 𝑟´
𝑡 ≠ 0, ∀𝑡 ∈ 𝑎, 𝑏 si
𝑇 𝑡 =
𝑟´(𝑡)
||𝑟´(𝑡)||
Denota un vector tangente unitario a C entonces:
𝐹. 𝑑𝑟 =
𝑎
𝑏
𝐹 𝑟 𝑡 . 𝑟´ 𝑡 𝑑𝑡
=
𝑎
𝑏
[𝐹 𝑟 𝑡 .
𝑟´ 𝑡
𝑟´ 𝑡
]||𝑟´(𝑡)||𝑑𝑡
=
𝑎
𝑏
[𝐹 𝑟 𝑡 . 𝑇(𝑟)]||𝑟´(𝑡)||𝑑𝑡
= 𝐹. 𝑇𝑑𝑠 = 𝑓𝑑𝑠
Donde 𝑓 = 𝐹. 𝑇, por lo tanto : 𝐹. 𝑑𝑟 = 𝐹. 𝑇 𝑑𝑠](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-34-320.jpg)



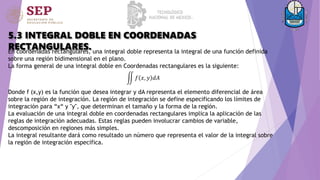
![5.10 TEOREMAS DE INTEGRALES. APLICACIONES.
Teorema de Green. Sea C una curva dada por la parametrización:
𝑟: [𝑎, 𝑏] → ∁𝑐𝐼𝑅3
𝑡 → 𝑟 𝑡 = 𝑥 𝑡 , 𝑦 𝑡 , 𝑧 𝑡
Se dice que la curva es cerrada si r(a)=r(b).C se dice que es una curva simple si r es inyectiva en (a,b),
es decir, si: r(t1)≠r(t2) cuando a≤ 𝑡1 ≤ 𝑡2 ≤ 𝑏
Teorema de Green. Sea C una curva en el plano cerrada simple suave atrozos y orientada
positivamente. Si P(x,y) y Q(x,y) son dos funciones reales de clase e 𝐶1
, entonces:
𝑷𝒅𝒙 + 𝑸𝒅𝒚 =
𝑫
(
𝝏𝑸
𝝏𝒙
−
𝝏𝒑
𝝏𝒚
)𝒅𝒙𝒅𝒚](https://image.slidesharecdn.com/presentaciongrupalunidad5-240315211911-e9507223/85/PRESENTACION-GRUPAL-CALCULO-VECTORIAL-UNIDAD-5-pptx-40-320.jpg)