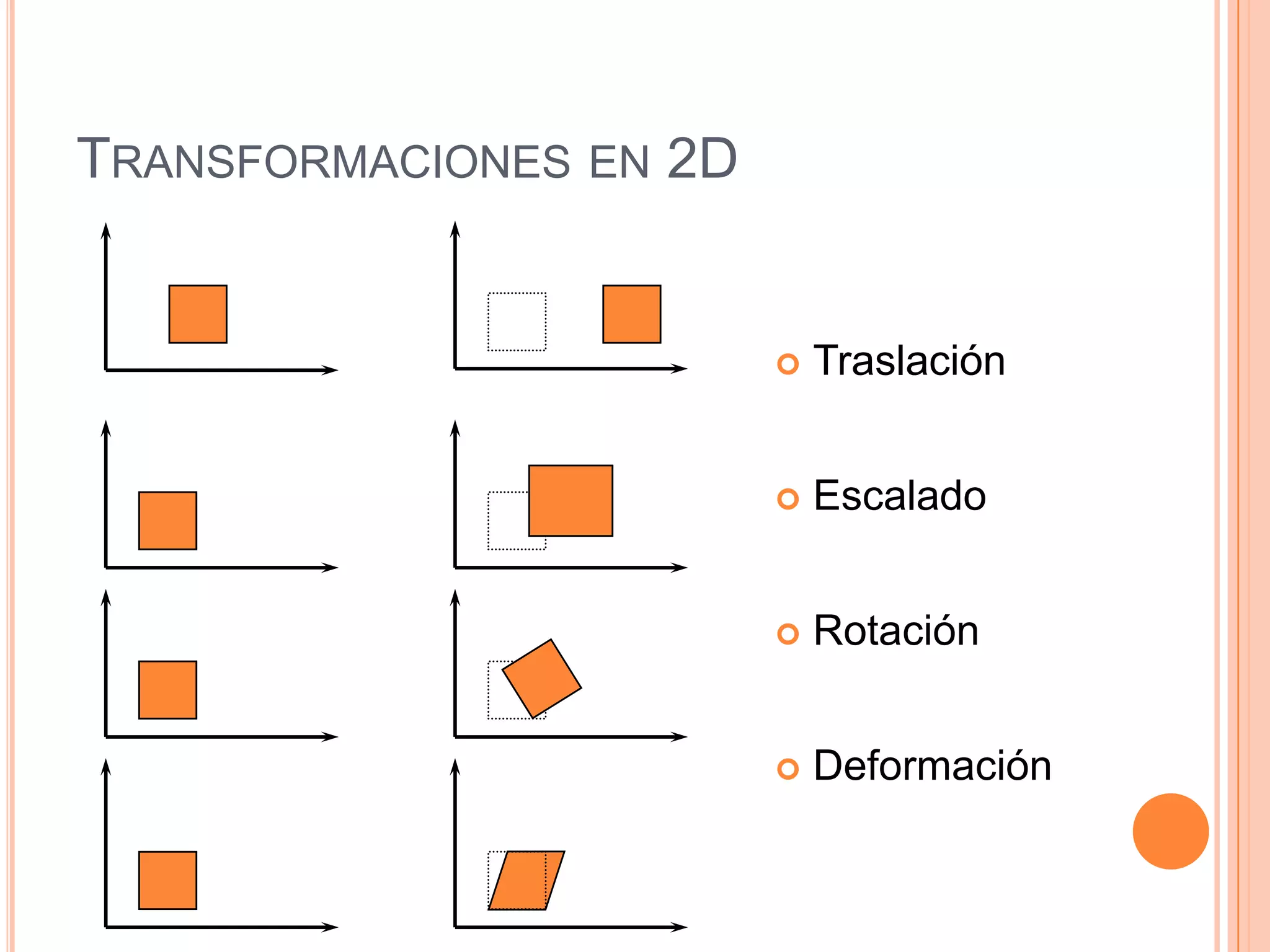
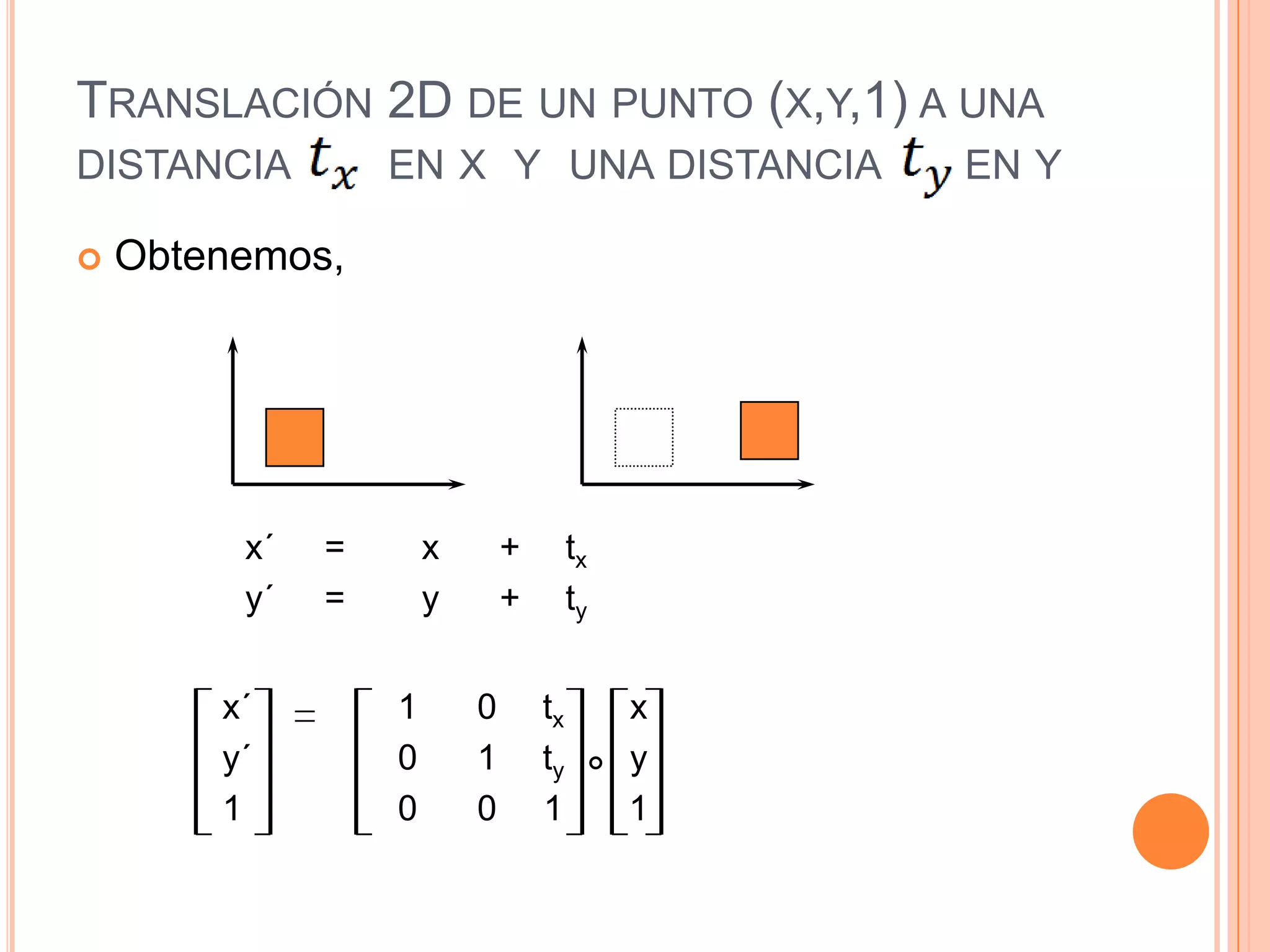
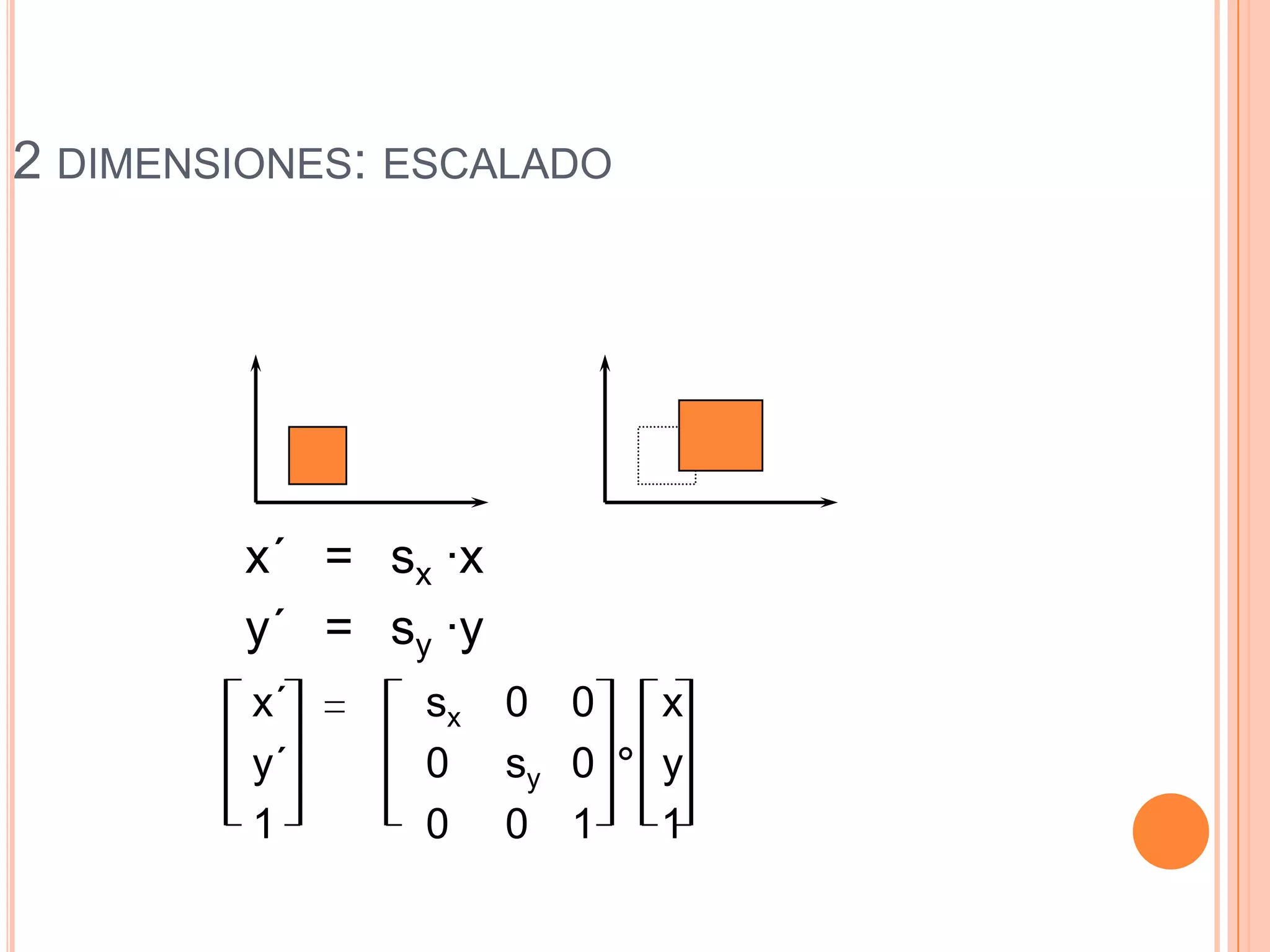
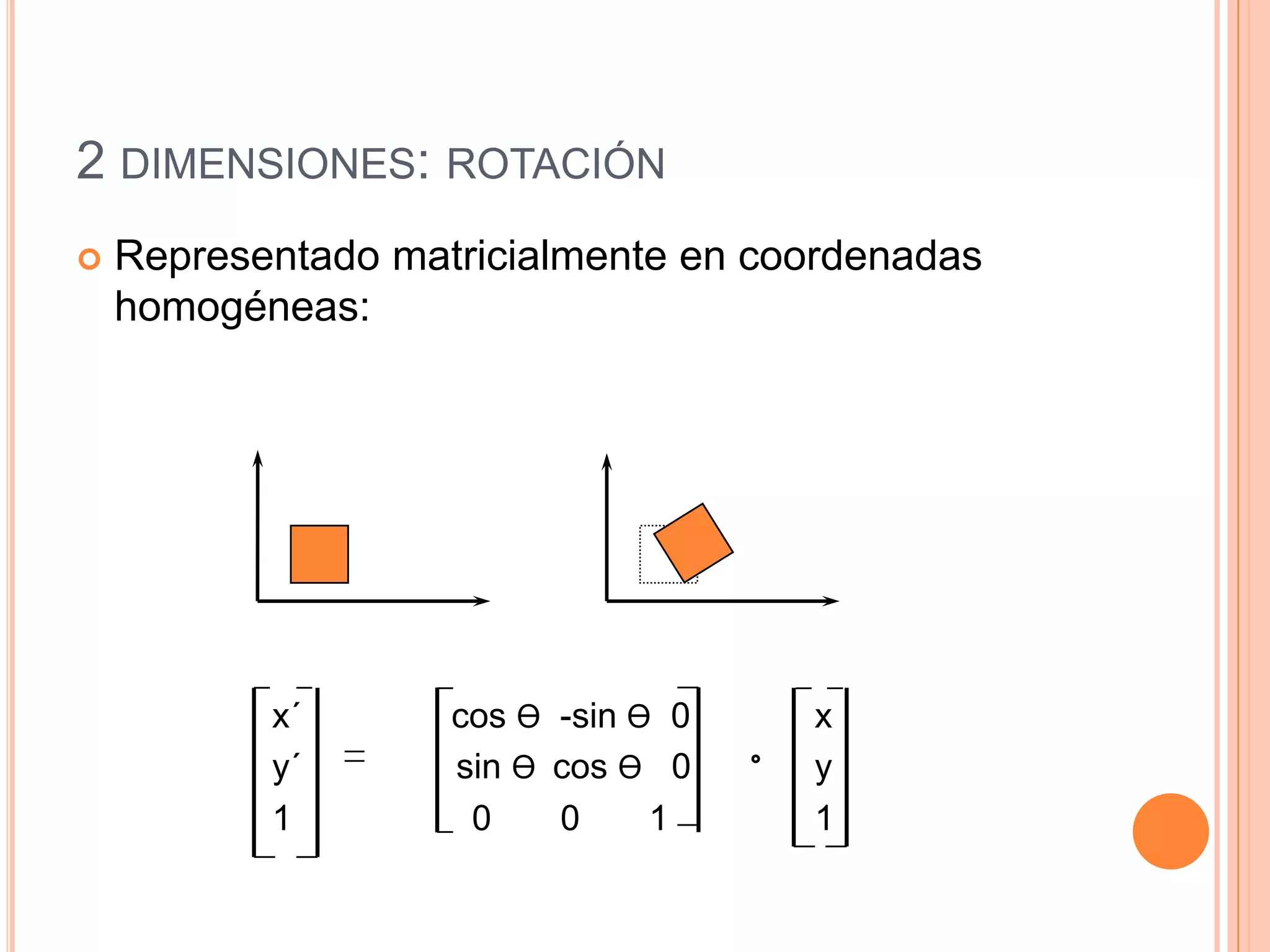
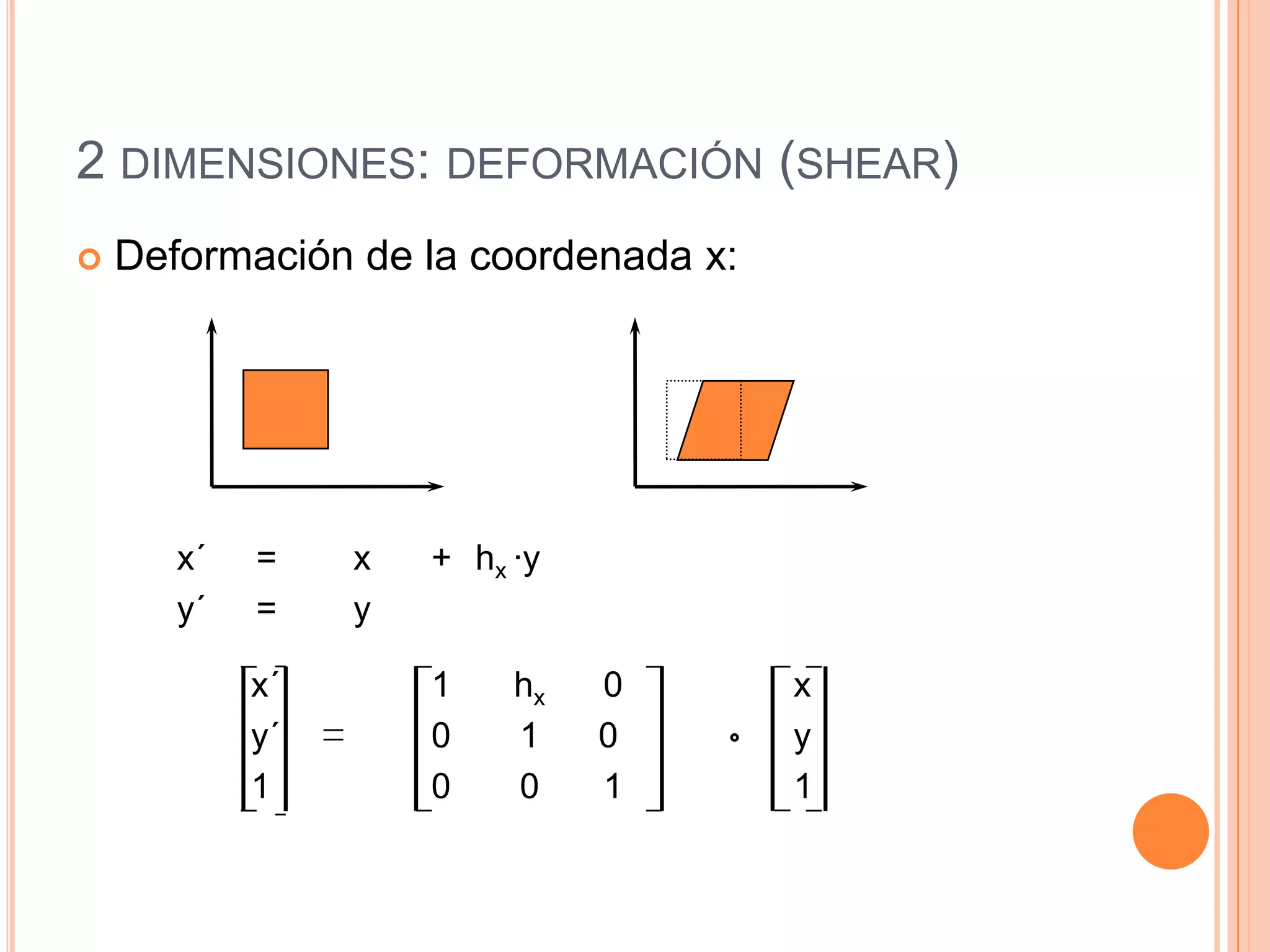
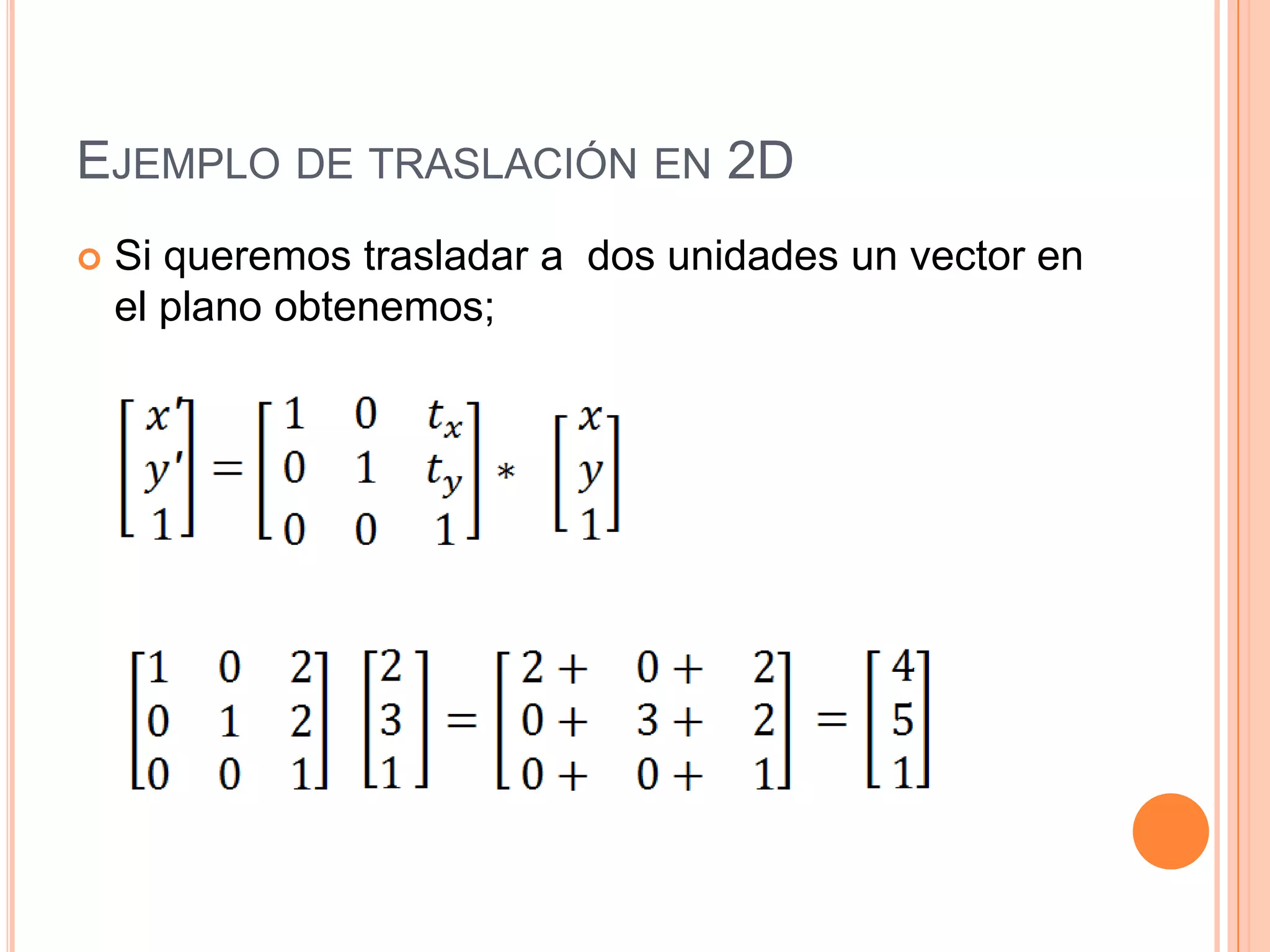
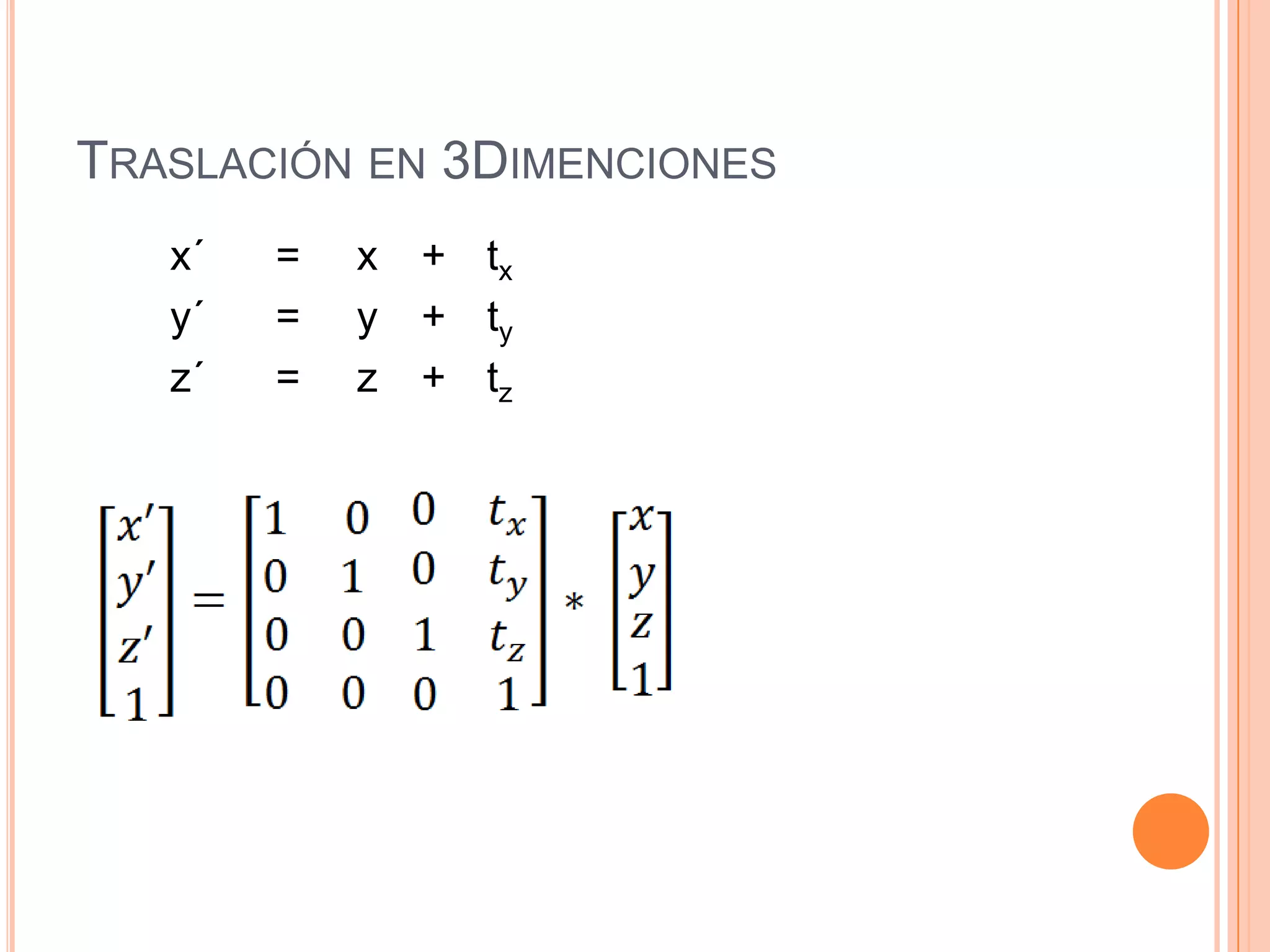
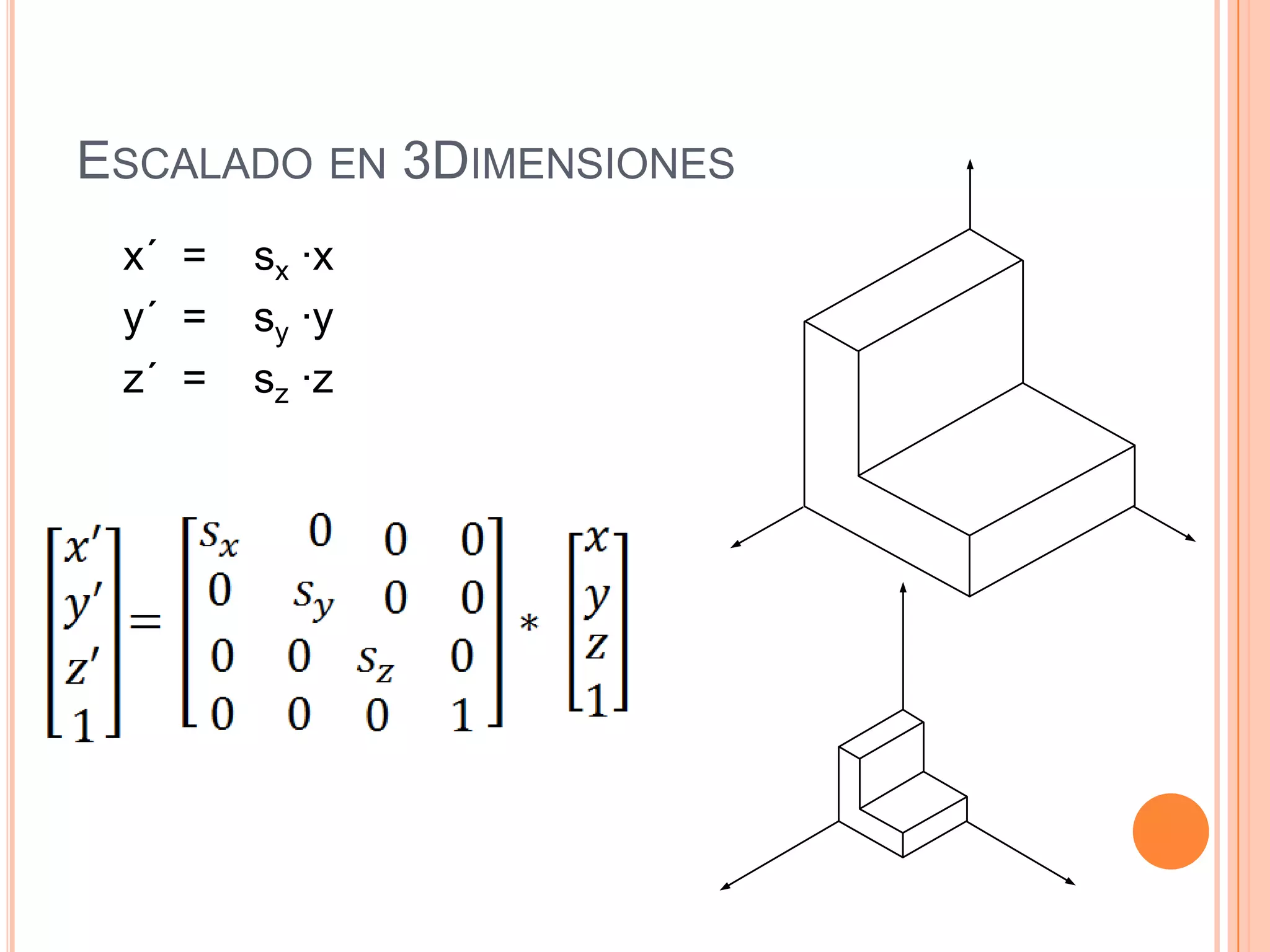
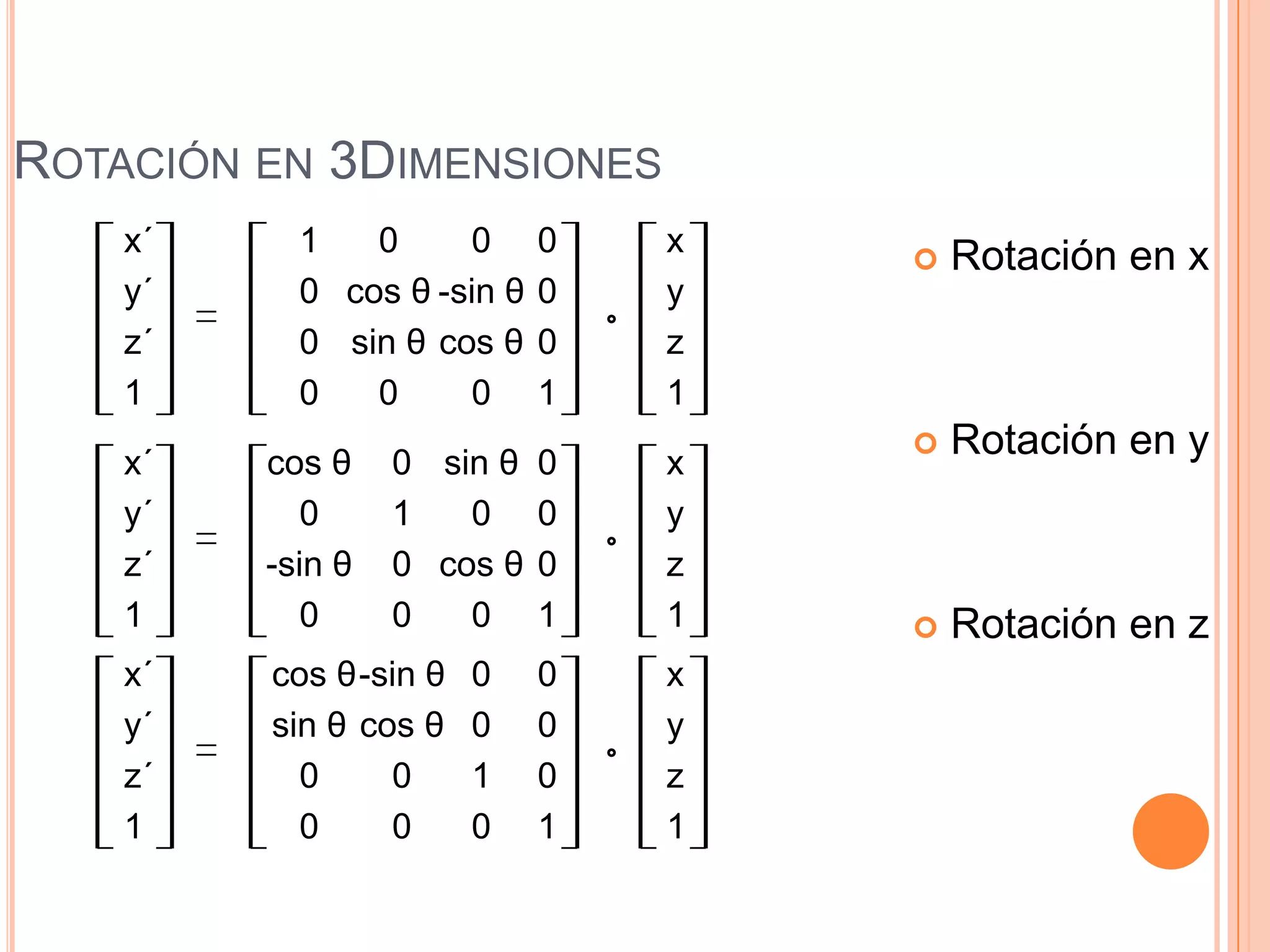
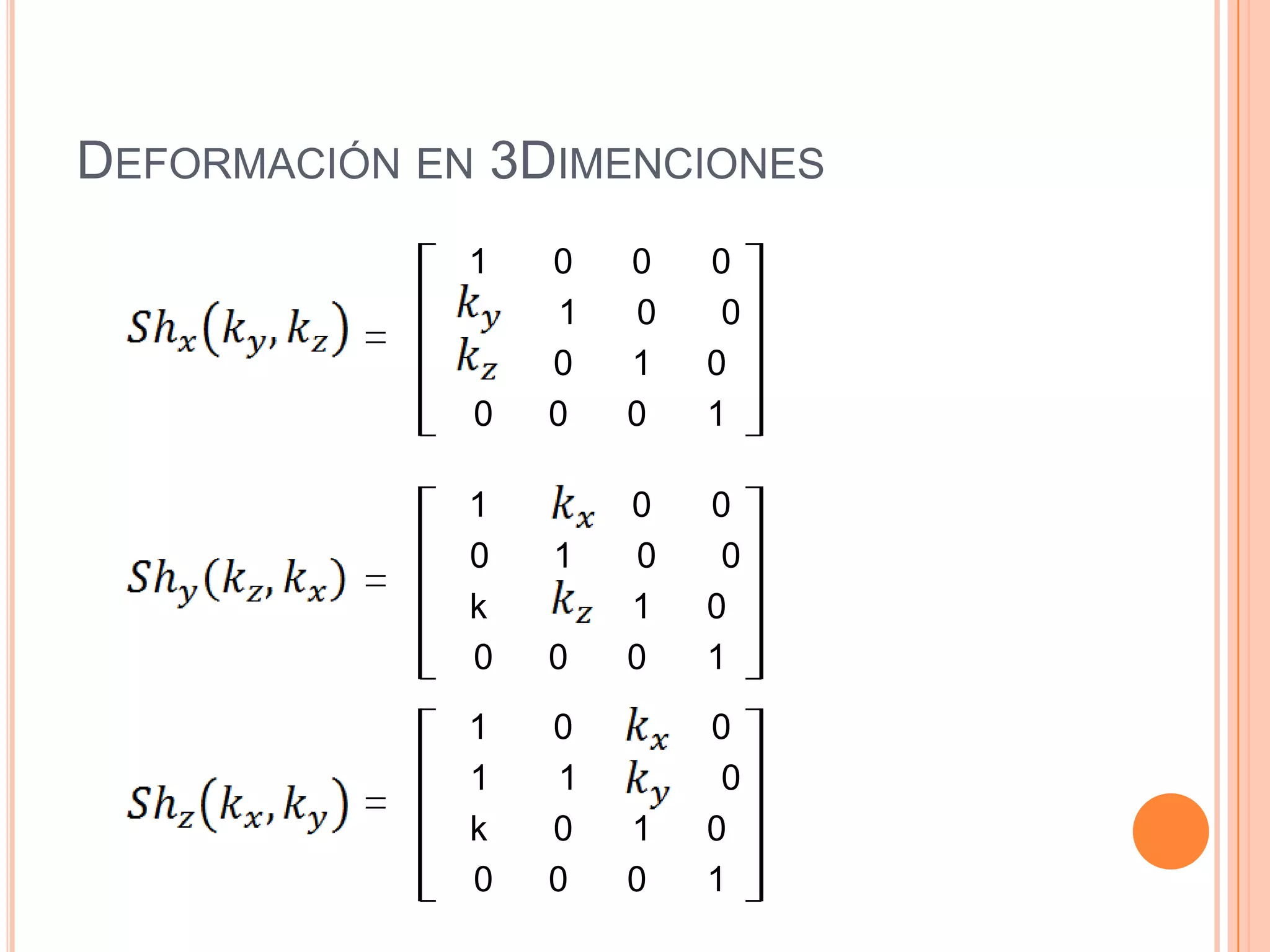
Este documento resume la historia y definición de las matrices, incluyendo diferentes tipos como matrices cuadradas, nulas e identidad. Explica cómo se pueden usar matrices para representar transformaciones como traslación, escalado y rotación en 2D y 3D, y cómo la composición de transformaciones se puede lograr mediante el producto de matrices. Finalmente, discute cómo las matrices se implementan eficientemente en computadoras para gráficos 3D.
![La matriz es una matriz 4x3. El elemento A[2,3] o a2,3 es 7.](https://image.slidesharecdn.com/presentacionmatrices-100204171243-phpapp02/75/Presentacion-Matrices-9-2048.jpg)
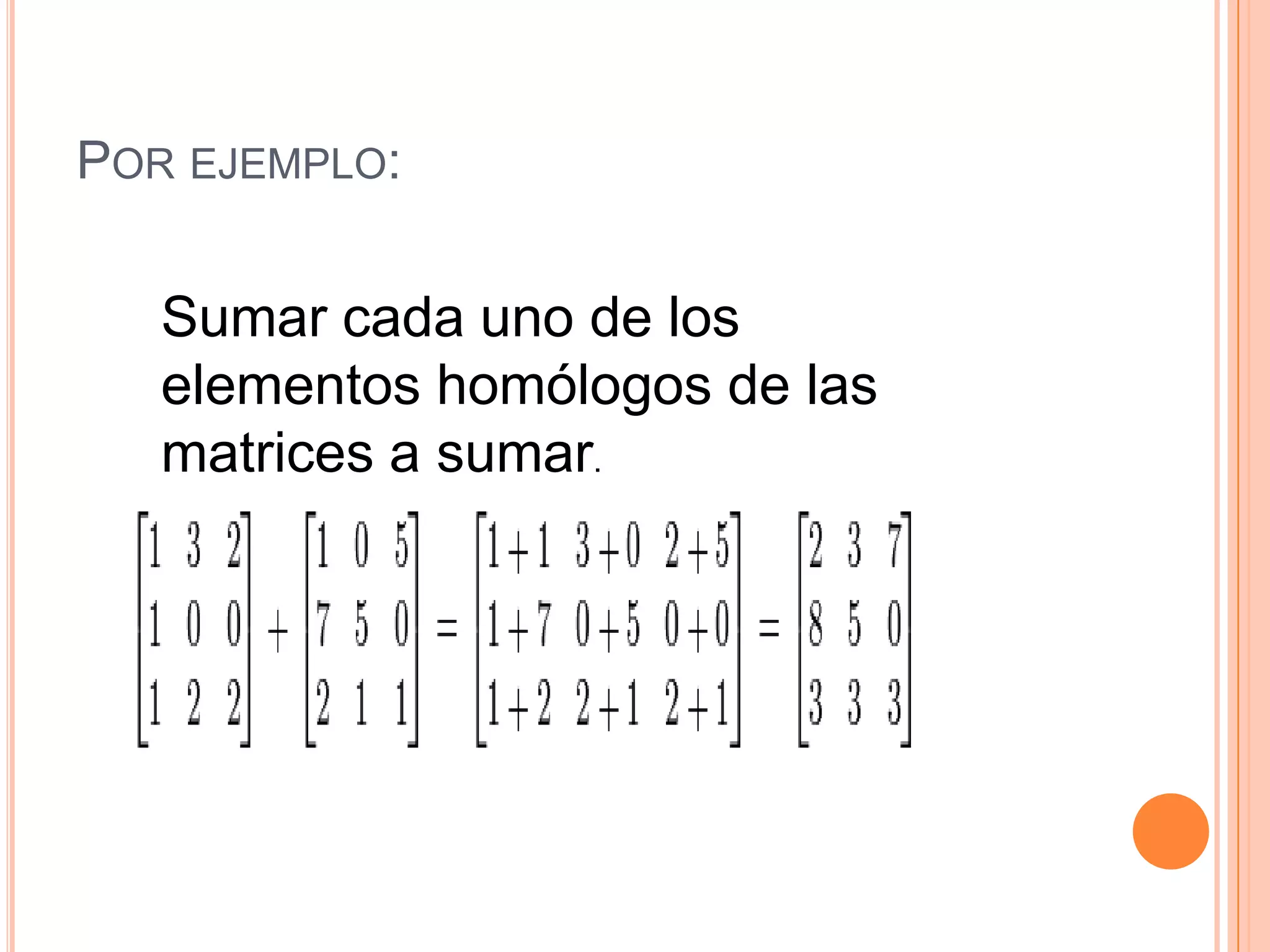
![Suma o adición Dadas las matrices m-por-n ,A y B, su sumaA + B es la matriz m-por-n calculada sumando los elementos correspondientes (A + B)[i, j] = A[i, j] + B[i, j]](https://image.slidesharecdn.com/presentacionmatrices-100204171243-phpapp02/75/Presentacion-Matrices-16-2048.jpg)