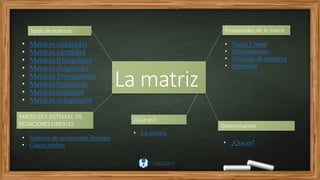
El documento presenta un mapa mental sobre la matriz que incluye definiciones y ejemplos de diferentes tipos de matrices como matrices cuadradas, matrices identidad, matrices triangulares, matrices diagonales, matrices transpuestas, matrices simétricas, matrices normales y matrices ortogonales. También explica cómo se pueden resolver sistemas de ecuaciones lineales usando matrices y el método de Gauss-Jordan, y define conceptos como determinantes, suma y resta de matrices, división de matrices y potencias de matrices.