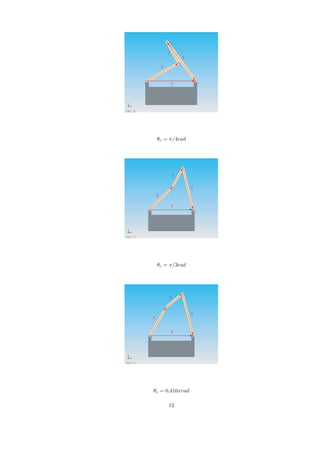
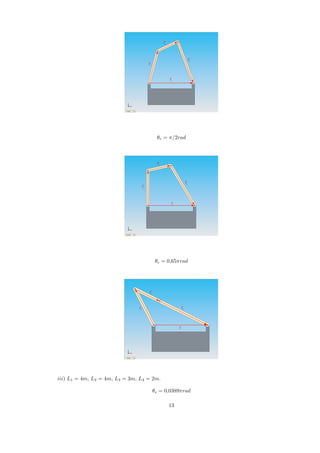
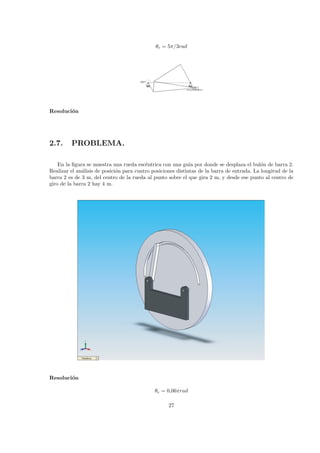
Este documento presenta una serie de problemas de cinemática de mecanismos resueltos analíticamente y gráficamente. Se identifican los grados de libertad, barras y pares cinemáticos de varios mecanismos. Luego, se realiza un análisis de posición gráfico dibujando las barras para diferentes posiciones de entrada en mecanismos como bielas, levas excéntricas y ruedas excéntricas. Finalmente, se introduce el análisis de posición analítico.