Descargar como PDF, PPTX

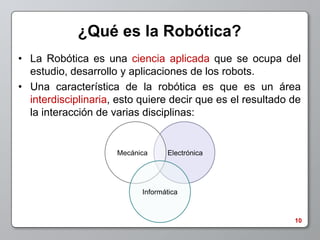
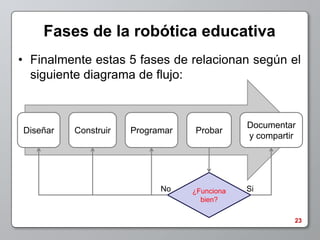
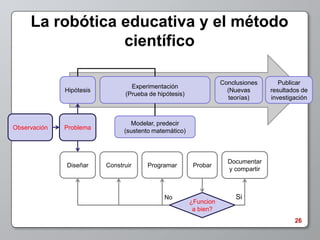
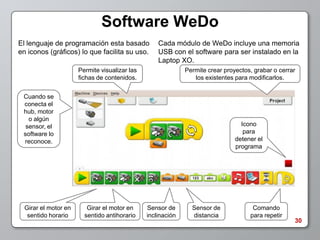
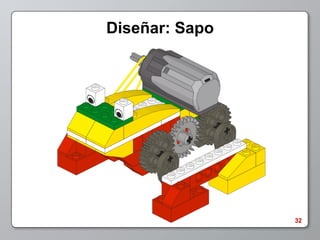
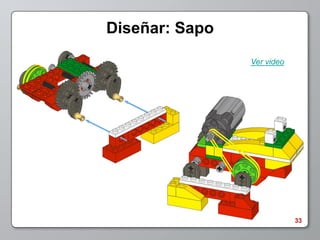

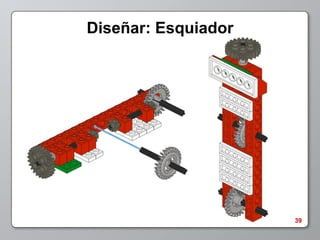
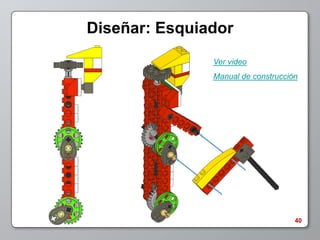

Este documento presenta una introducción a la robótica educativa. Explica que la robótica educativa utiliza la construcción de creaciones físicas controladas por computadora para facilitar el aprendizaje a través de la experiencia activa. También describe las cinco fases del proceso de robótica educativa: diseñar, construir, programar, probar y documentar y compartir. El objetivo final es desarrollar habilidades de pensamiento como la creatividad y la resolución de problemas.



































































