Descargado 27 veces

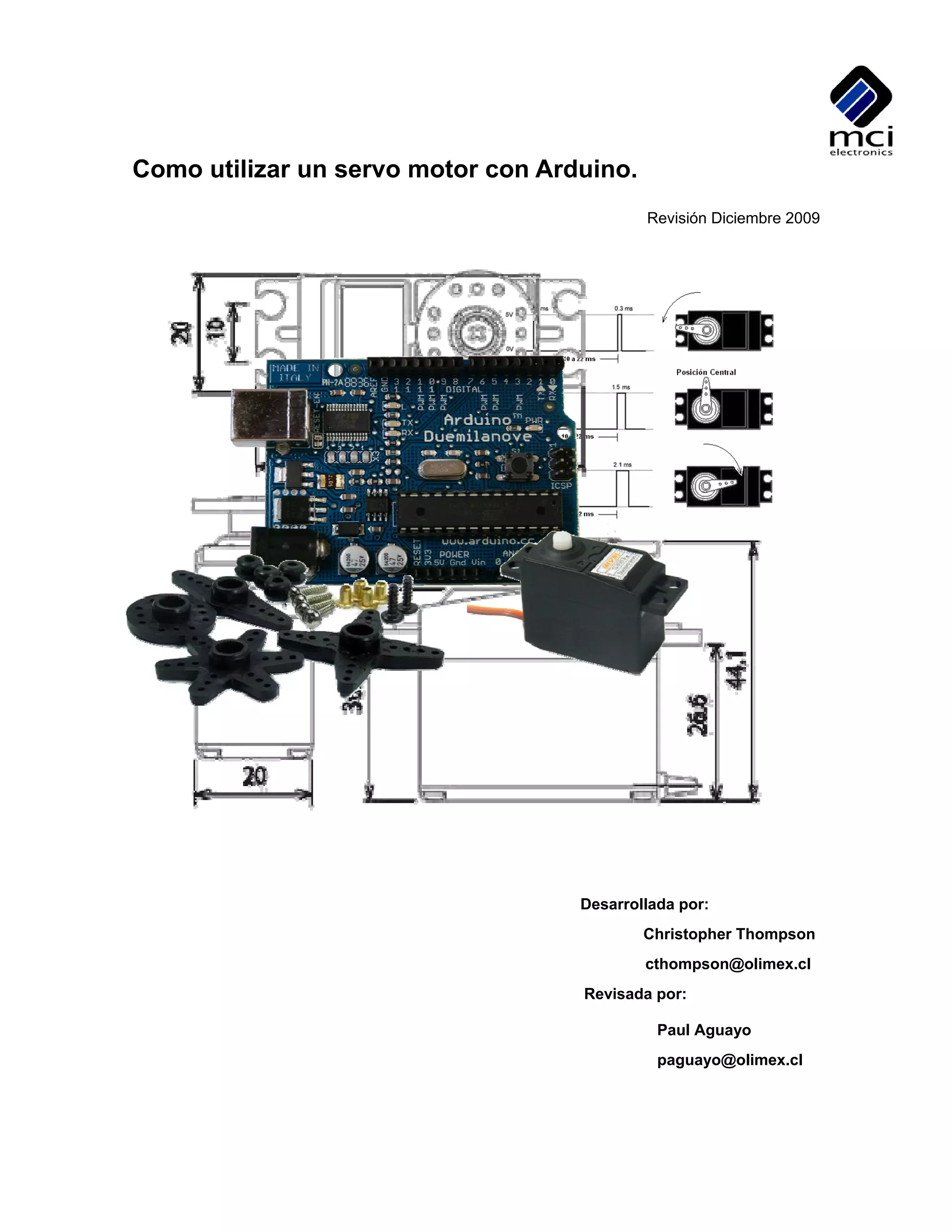

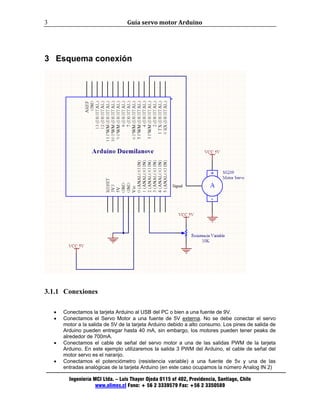
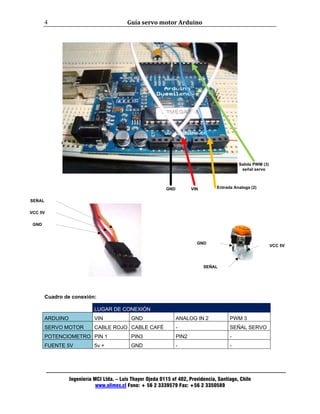
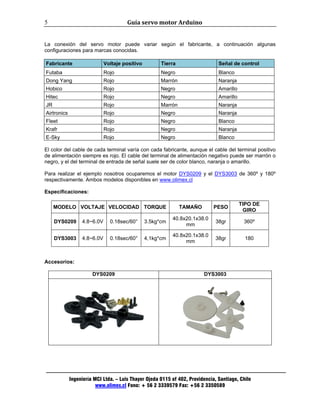



Este documento describe cómo conectar y controlar motores servo estándar de 360° y 180° utilizando una placa Arduino. Explica los componentes necesarios, el esquema de conexión y el código para controlar la posición del motor servo variando el ancho del pulso de salida mediante un potenciómetro conectado a una entrada analógica de Arduino.







































![Control de un Motor [Autoaaaaaaaaaaaaaaaaaguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/controldeunmotorautoguardado-241113235820-1bbdae93-thumbnail.jpg?width=640&height=640&fit=bounds)













