Descargar como PDF, PPTX





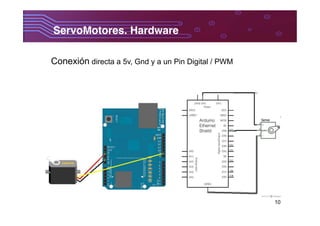
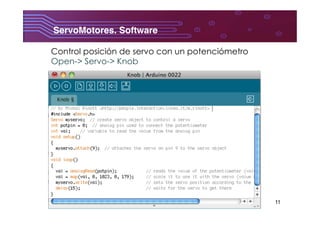


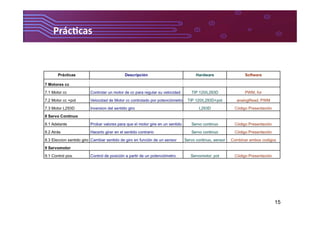



Este documento trata sobre motores y potencia en Arduino. Explica los tipos de motores de corriente continua, sus características y cómo conectarlos mediante transistores o circuitos integrados para regular la velocidad y cambiar el sentido de giro. También describe servomotores y cómo controlar su posición, así como motores paso a paso y circuitos de potencia con relés. El documento fue escrito por José Pujol para un curso de Arduino en el IES Los Viveros de Sevilla.












![Curso basico torno cnc leadwell[2]](https://cdn.slidesharecdn.com/ss_thumbnails/cursobasicotornocncleadwell2-130226100755-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)








![Rosa[1]](https://cdn.slidesharecdn.com/ss_thumbnails/rosa1-121031140255-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






























































