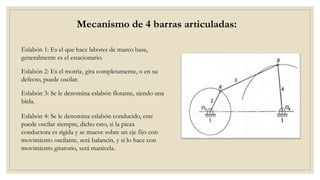
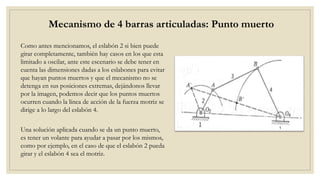
Este documento describe los sistemas articulados de 4 barras. Explica que estos sistemas están compuestos por 4 eslabones unidos por pares, lo que permite movimientos giratorios u oscilatorios. También describe los diferentes tipos de sistemas de 4 barras, sus aplicaciones y cómo se pueden invertir manteniendo los mismos movimientos relativos.