Este documento describe los aspectos constructivos de las máquinas asíncronas, incluyendo detalles sobre el rotor, el estator y los diferentes tipos de aislamiento eléctrico utilizados. Explica las diferencias entre devanados de hilo y preformados, así como los diferentes elementos que componen el aislamiento estatórico como el muro aislante, el aislamiento entre espiras y conductores elementales. También presenta información sobre los materiales aislantes utilizados para los conductores elementales como películas de poliimida y fibra de vid







![7.14. Circuito equivalente de
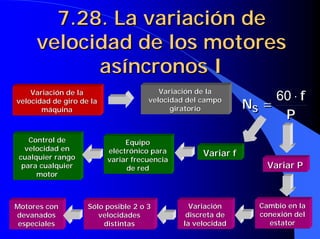
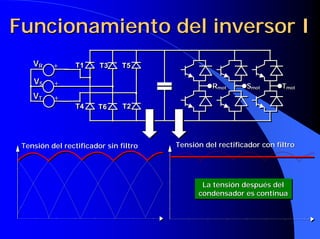
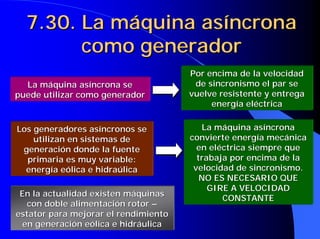
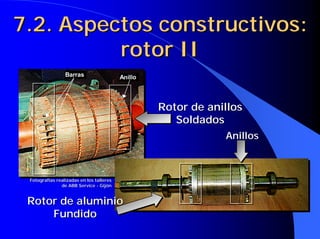
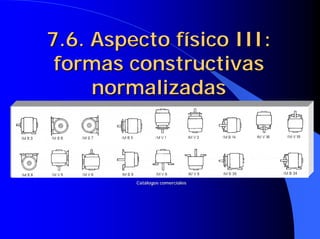
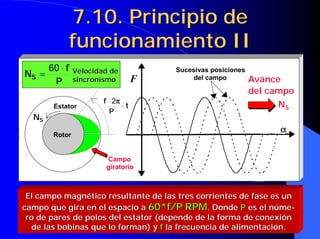
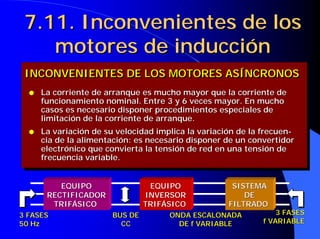
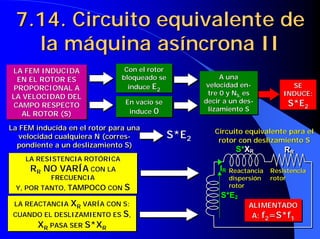
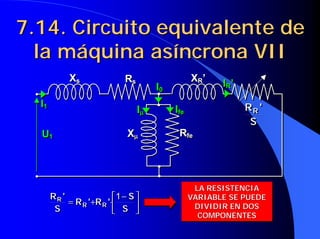
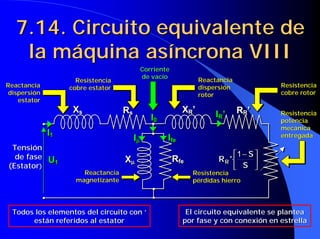
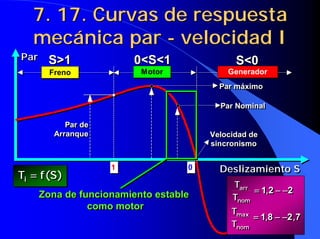
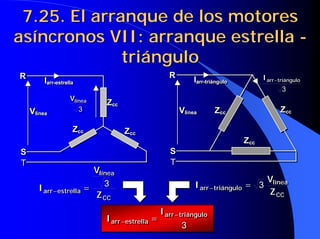
7.14. Circuito equivalente de
la máquina asíncrona I
la máquina asíncrona I
}
}
[ ] 1
1
1 E
I
jX
R
U S
s +
⋅
+
= [ ] 1
1
1 E
I
jX
R
U S
s +
⋅
+
=
Xs Rs
U1 E1
I1
Xs Rs
U1 E1
I1
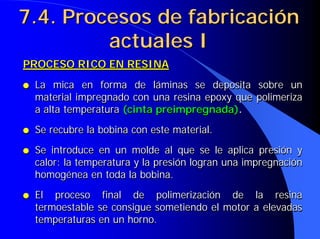
CIRCUITO EQUIVALENTE
CIRCUITO EQUIVALENTE
DEL ESTATOR PARA
DEL ESTATOR PARA
CUALQUIER VELOCIDAD
CUALQUIER VELOCIDAD
DE GIRO
DE GIRO
ALIMENTADO A f1
frecuencia de red
ALIMENTADO A f
ALIMENTADO A f1
1
frecuencia de red
frecuencia de red
Reactancia
Reactancia
dispersión
dispersión
estator
estator
Resistencia
Resistencia
estator
estator
Reactancia
Reactancia
magnetizante
magnetizante
estator
estator
EQUIVALENTE
EQUIVALENTE
POR FASE
POR FASE
CIRCUITO EQUIVALENTE
CIRCUITO EQUIVALENTE
ROTOR CON LA
ROTOR CON LA
MÁQUINA BLOQUEADA
MÁQUINA BLOQUEADA
ALIMENTADO A f1
frecuencia de red
ALIMENTADO A f
ALIMENTADO A f1
1
frecuencia de red
frecuencia de red
XR RR
E2
IRbloq
XR RR
E2
IRbloq
Reactancia
Reactancia
dispersión
dispersión
rotor
rotor
Resistencia
Resistencia
rotor
rotor
Reactancia
Reactancia
magnetizante
magnetizante
rotor
rotor
}
}EQUIVALENTE
EQUIVALENTE
POR FASE
POR FASE
CON ROTOR BLO-
QUEADO:
frotor=festator
CON ROTOR BLO
CON ROTOR BLO-
-
QUEADO:
QUEADO:
f
frotor
rotor=
=f
festator
estator
[ ] bloq
R
R
R I
jX
R
E ⋅
+
=
2
[ ] bloq
R
R
R I
jX
R
E ⋅
+
=
2](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-38-320.jpg)
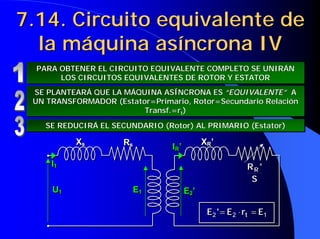
![7.14. Circuito equivalente de
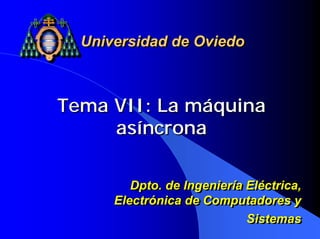
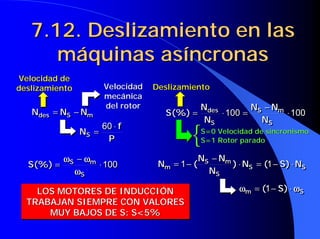
7.14. Circuito equivalente de
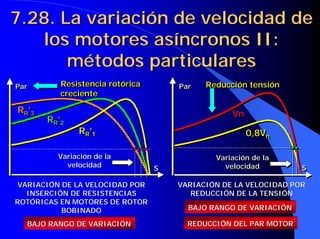
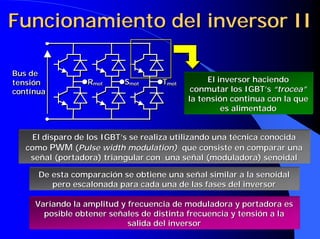
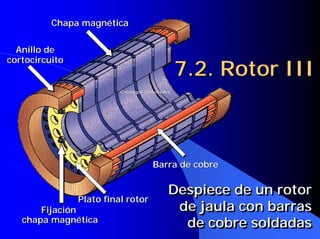
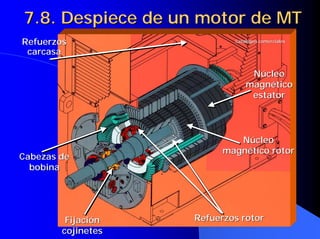
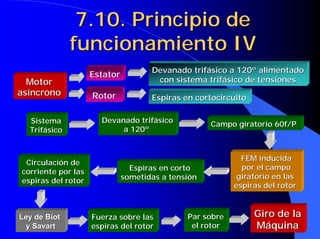
la máquina asíncrona III
la máquina asíncrona III
[ ] s
R
R
R I
S
jX
R
E
S ⋅
⋅
+
=
⋅ 2
[ ] s
R
R
R I
S
jX
R
E
S ⋅
⋅
+
=
⋅ 2
R
R
R
R
Rs
jX
S
R
E
jX
R
E
S
I
+
=
+
⋅
= 2
2
R
R
R
R
Rs
jX
S
R
E
jX
R
E
S
I
+
=
+
⋅
= 2
2
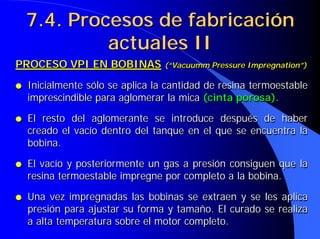
Se puede obtener la misma corriente en
el mismo circuito alimentado a f1 con sólo
cambiar RR por RR/S
Se puede obtener la misma corriente en
Se puede obtener la misma corriente en
el mismo circuito alimentado a
el mismo circuito alimentado a f
f1
1 con sólo
con sólo
cambiar R
cambiar RR
R por R
por RR
R/S
/S
ES POSIBLE OBTENER EL CIRCUITO
EQUIVALENTE DE LA MÁQUINA
ASÍNCRONA TRABAJANDO SÓLO CON LA
FRECUENCIA DEL ESTATOR. BASTA
SIMULAR EL EFECTO DEL GIRO CON LA
RESISTENCIA RR/S
ES POSIBLE OBTENER EL CIRCUITO
ES POSIBLE OBTENER EL CIRCUITO
EQUIVALENTE DE LA MÁQUINA
EQUIVALENTE DE LA MÁQUINA
ASÍNCRONA TRABAJANDO SÓLO CON LA
ASÍNCRONA TRABAJANDO SÓLO CON LA
FRECUENCIA DEL ESTATOR. BASTA
FRECUENCIA DEL ESTATOR. BASTA
SIMULAR EL EFECTO DEL GIRO CON LA
SIMULAR EL EFECTO DEL GIRO CON LA
RESISTENCIA
RESISTENCIA R
RR
R/S
/S
CIRCUITO EQ. ROTOR A
CIRCUITO EQ. ROTOR A
DESLIZAMIENTO S
DESLIZAMIENTO S
S*XR RR
S*E2
IR
S*XR RR
S*E2
IR Reactancia
Reactancia
dispersión
dispersión
rotor
rotor
Resistencia
Resistencia
rotor
rotor
ALIMENTADO
A: f2=S*f1
ALIMENTADO
ALIMENTADO
A:
A: f
f2
2=S*f
=S*f1
1
ALIMENTADO
A: f1
ALIMENTADO
ALIMENTADO
A:
A: f
f1
1
XR
E2
IR
S
RR
XR
E2
IR
S
RR](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-40-320.jpg)
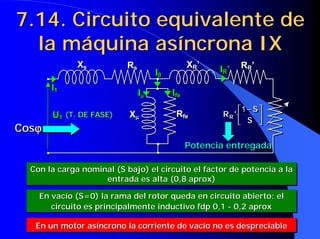
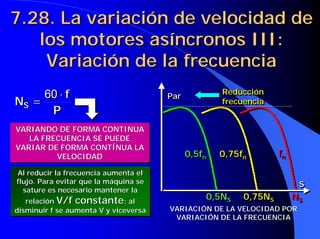
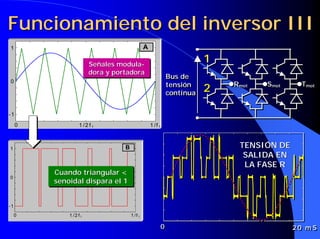
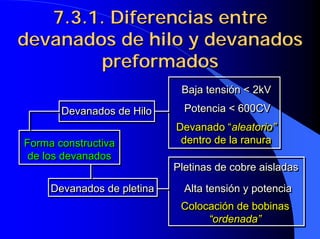
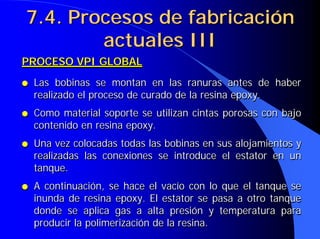
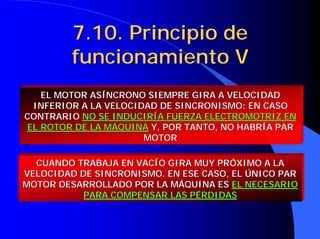
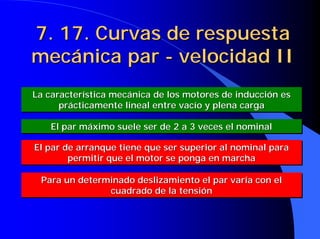
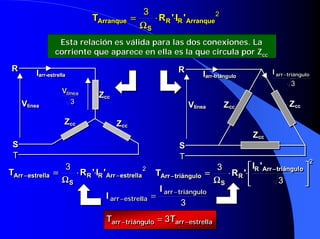
![7.15. Cálculo de las pérdidas
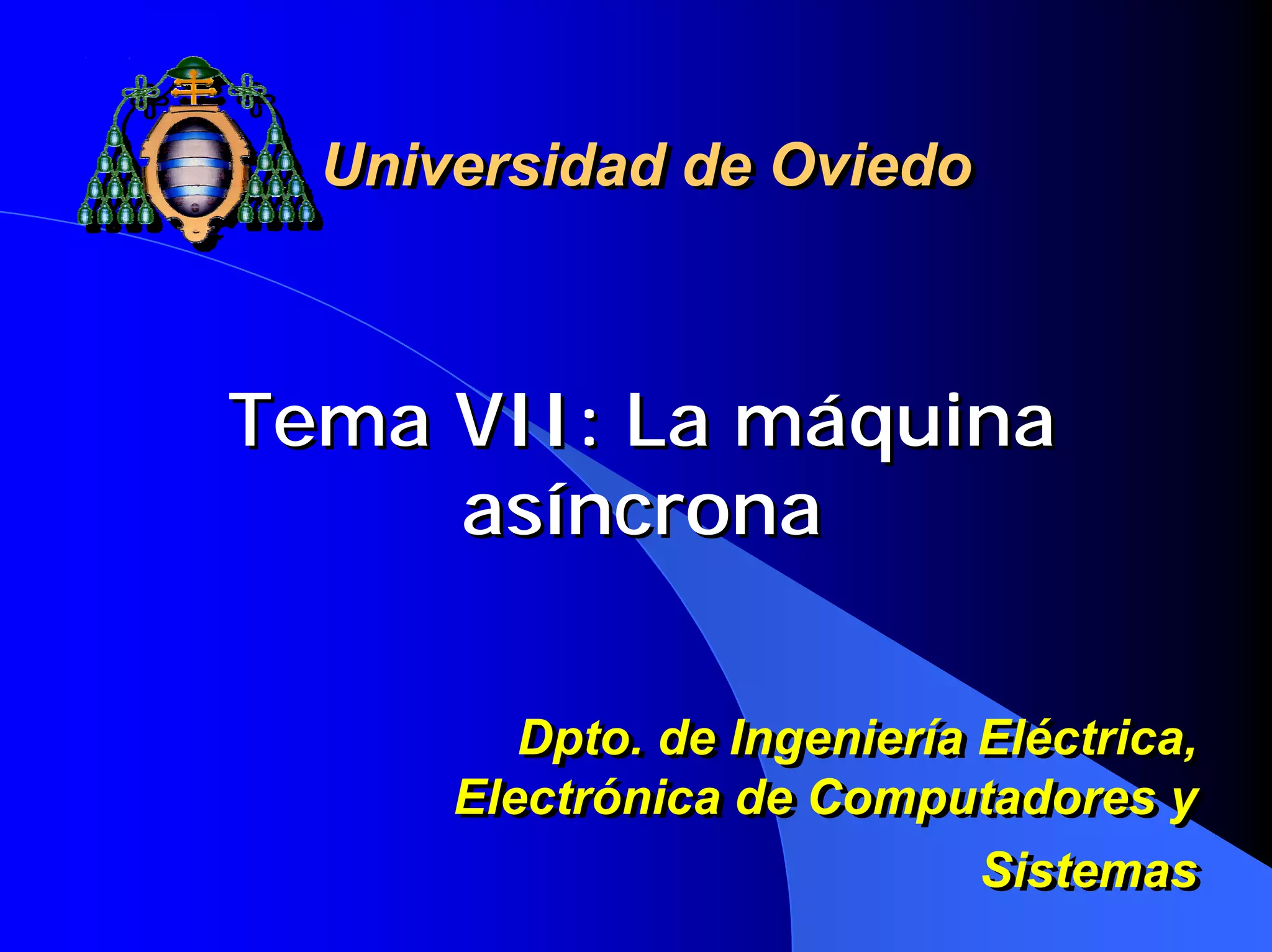
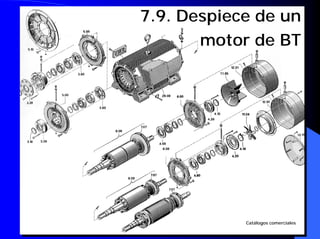
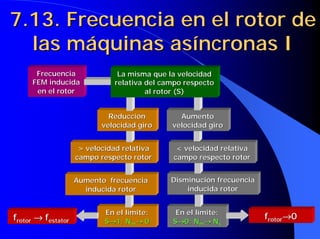
7.15. Cálculo de las pérdidas
en la máquina asíncrona II
en la máquina asíncrona II
[ ] g
g
g
rot
cu
g
mi P
S
P
S
P
P
P
P ⋅
−
=
⋅
−
=
−
= 1
[ ] g
g
g
rot
cu
g
mi P
S
P
S
P
P
P
P ⋅
−
=
⋅
−
=
−
= 1
OTRA FORMA DE CALCULAR
OTRA FORMA DE CALCULAR-
-
LA A PARTIR DEL DESLIZA
LA A PARTIR DEL DESLIZA-
-
MIENTO
MIENTO
es
rotacional
y
mecánicas
Pérdidas
P
P mi
U −
−
−
−
=
=
=
= es
rotacional
y
mecánicas
Pérdidas
P
P mi
U −
−
−
−
=
=
=
=
PAR INTERNO: EL PAR TOTAL
PAR INTERNO: EL PAR TOTAL
DESARROLLADO INTERNA
DESARROLLADO INTERNA-
-
MENTE POR LA MÁQUINA
MENTE POR LA MÁQUINA
Velocidad angular
Velocidad angular
de giro del rotor
de giro del rotor
[
[
[
[ ]
]
]
]
S
g
g
mi
i
P
P
S
P
T
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
−
−
−
−
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
1
[
[
[
[ ]
]
]
]
S
g
g
mi
i
P
P
S
P
T
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
−
−
−
−
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
1
Velocidad angular
Velocidad angular
de sincronismo
de sincronismo
PAR ÚTIL
PAR ÚTIL: EL PAR QUE ES
: EL PAR QUE ES
CAPAZ DE DESARROLLAR EL
CAPAZ DE DESARROLLAR EL
MOTOR EN EL EJE
MOTOR EN EL EJE
Ω
Ω
Ω
Ω
=
=
=
= U
U
P
T
Ω
Ω
Ω
Ω
=
=
=
= U
U
P
T](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-48-320.jpg)
![jXs Rs jXR’
IR’
S
'
RR
jXµ
µ
µ
µ
A
B
U1
I1
+
jXs Rs jXR’
IR’
S
'
RR
jXµ
µ
µ
µ
A
B
U1
I1
+
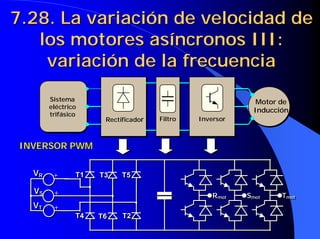
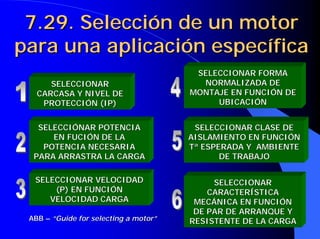
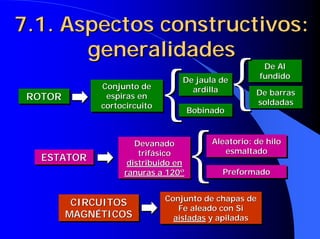
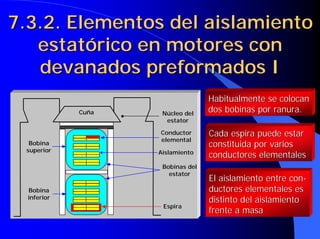
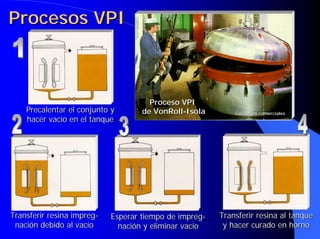
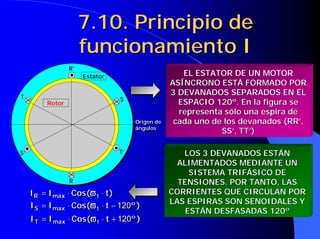
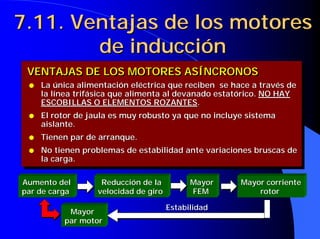
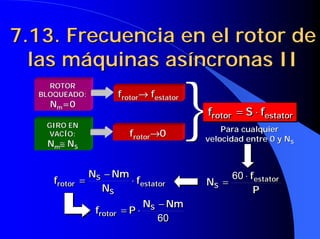
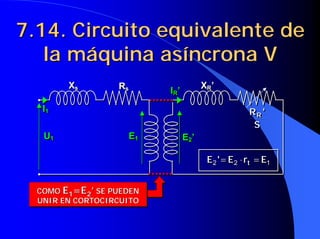
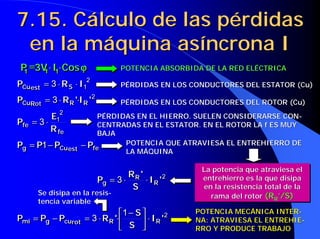
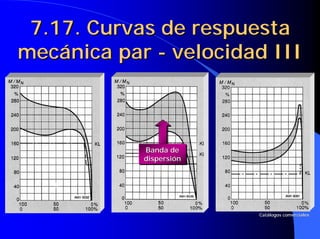
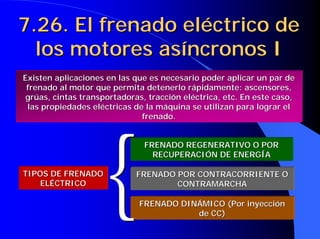
7.16. Cálculo del par de una
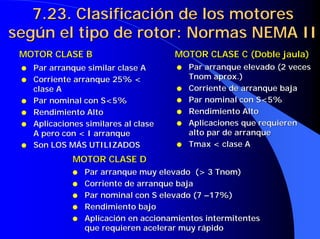
7.16. Cálculo del par de una
máquina asíncrona I
máquina asíncrona I
CALCULANDO EL
EQUIVALENTE
THEVENIN
ENTRE A y B
CALCULANDO EL
CALCULANDO EL
EQUIVALENTE
EQUIVALENTE
THEVENIN
THEVENIN
ENTRE
ENTRE A y B
A y B
Se puede
despreciar Rfe
Se puede
Se puede
despreciar
despreciar R
Rfe
fe
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+ [
[
[
[ ]
]
]
]
µ
µ
µ
µ
µ
µ
µ
µ
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
=
=
=
=
X
X
j
R
jX
U
V
S
S
th
1
[
[
[
[ ]
]
]
]
µ
µ
µ
µ
µ
µ
µ
µ
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
=
=
=
=
X
X
j
R
jX
U
V
S
S
th
1
[
[
[
[ ]
]
]
]
[
[
[
[ ]
]
]
]
µ
µ
µ
µ
µ
µ
µ
µ
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
+
+
+
+
=
=
=
=
X
X
j
R
jX
jX
R
Z
S
S
S
S
th
[
[
[
[ ]
]
]
]
[
[
[
[ ]
]
]
]
µ
µ
µ
µ
µ
µ
µ
µ
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
+
+
+
+
=
=
=
=
X
X
j
R
jX
jX
R
Z
S
S
S
S
th](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-49-320.jpg)
![7.16. Cálculo del par de una
7.16. Cálculo del par de una
máquina asíncrona II
máquina asíncrona II
[
[
[
[ ]
]
]
]2
2
'
X
X
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]2
2
'
X
X
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+
[
[
[
[ ]
]
]
]
'
X
X
j
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]
'
X
X
j
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]2
2
2
2
3
3
'
X
X
S
'
R
R
S
'
R
V
'
I
S
'
R
P
R
th
R
th
R
th
R
R
g
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
⋅
⋅
⋅
⋅
=
=
=
=
[
[
[
[ ]
]
]
]2
2
2
2
3
3
'
X
X
S
'
R
R
S
'
R
V
'
I
S
'
R
P
R
th
R
th
R
th
R
R
g
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
⋅
⋅
⋅
⋅
=
=
=
=
)
S
(
f
Ti =
=
=
= )
S
(
f
Ti =
=
=
=
[
[
[
[ ]
]
]
]2
2
2
3
'
X
X
S
'
R
R
S
'
R
V
P
T
R
th
R
th
R
th
S
S
g
i
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
[
[
[
[ ]
]
]
]2
2
2
3
'
X
X
S
'
R
R
S
'
R
V
P
T
R
th
R
th
R
th
S
S
g
i
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-50-320.jpg)
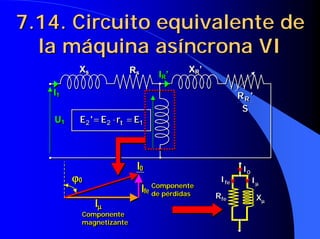
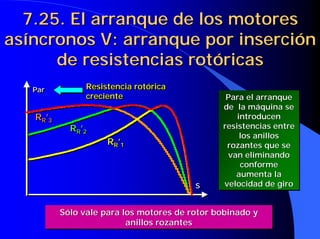
![7.18. Par máximo de un motor
7.18. Par máximo de un motor
de inducción I
de inducción I
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+
jXth Rth jXR’
IR’
S
'
RR
A
B
Vth
I1
+
El par será
máximo cuando
Pg sea máxima,
es decir cuando
se transfiera a
RR’/S la máxima
potencia
El par será
El par será
máximo cuando
máximo cuando
P
Pg
g sea máxima,
sea máxima,
es decir cuando
es decir cuando
se transfiera a
se transfiera a
R
RR
R’/S
’/S la máxima
la máxima
potencia
potencia
[
[
[
[ ]
]
]
]2
2
'
X
X
R
S
'
R
R
th
th
R
+
+
+
+
+
+
+
+
=
=
=
= [
[
[
[ ]
]
]
]2
2
'
X
X
R
S
'
R
R
th
th
R
+
+
+
+
+
+
+
+
=
=
=
=
TEOREMA
TRANSFERENCIA
MÁX. POT
TEOREMA
TEOREMA
TRANSFERENCIA
TRANSFERENCIA
MÁX. POT
MÁX. POT
[
[
[
[ ]
]
]
]2
2
'
X
X
R
'
R
S
R
th
th
R
TMAX
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]2
2
'
X
X
R
'
R
S
R
th
th
R
TMAX
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
2
2
2
2
3
'
X
X
R
R
V
T
R
th
th
th
S
th
max
[
[
[
[ ]
]
]
]
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
2
2
2
2
3
'
X
X
R
R
V
T
R
th
th
th
S
th
max](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-55-320.jpg)
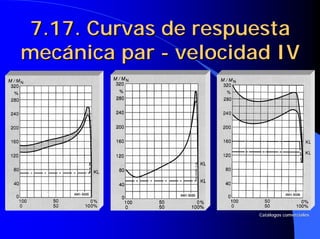
![7.18. Par máximo de un motor
7.18. Par máximo de un motor
de inducción II
de inducción II
Resistencia
Resistencia rotórica
rotórica creciente
creciente
S
STMAX1
TMAX1
S
STMAX2
TMAX2
S
STMAX3
TMAX3
Par
Par
S
S
[
[
[
[ ]
]
]
]2
2
'
X
X
R
'
R
S
R
th
th
R
TMAX
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]2
2
'
X
X
R
'
R
S
R
th
th
R
TMAX
+
+
+
+
+
+
+
+
=
=
=
=
EL deslizamiento al
que se produce el par
máximo SÍ
DEPENDE DE RR’
EL deslizamiento al
EL deslizamiento al
que se produce el par
que se produce el par
máximo
máximo SÍ
SÍ
DEPENDE DE R
DEPENDE DE RR
R’
’
Esta propiedad se usa para el arran-
que mediante inserción de resisten-
cias en máquinas de rotor bobinado
Esta propiedad se usa para el
Esta propiedad se usa para el arran
arran-
-
que mediante inserción de resisten
que mediante inserción de resisten-
-
cias
cias en máquinas de rotor bobinado
en máquinas de rotor bobinado
El par máximo NO
depende de la
resistencia
rotórica RR’
El par máximo NO
El par máximo NO
depende de la
depende de la
resistencia
resistencia
rotórica
rotórica R
RR
R’
’
[
[
[
[ ]
]
]
]
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
2
2
2
2
3
'
X
X
R
R
V
T
R
th
th
th
S
th
max
[
[
[
[ ]
]
]
]
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
=
=
=
2
2
2
2
3
'
X
X
R
R
V
T
R
th
th
th
S
th
max](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-56-320.jpg)
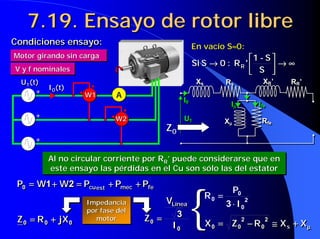
![7.20. Ensayo de rotor
7.20. Ensayo de rotor
bloqueado II
bloqueado II
Xs Rs
I1n
XR’ RR’
Xs Rs
I1n
XR’ RR’
3
cc
U
3
cc
U
Se puede despreciar
la rama paralelo
Se puede despreciar
Se puede despreciar
la rama paralelo
la rama paralelo
Z
Zcc
cc
rot
cu
est
cu
cc P
P
W
W
P +
+
+
+
=
=
=
=
+
+
+
+
=
=
=
= 2
1 rot
cu
est
cu
cc P
P
W
W
P +
+
+
+
=
=
=
=
+
+
+
+
=
=
=
= 2
1
n
cc
cc
I
U
Z
1
3
=
=
=
=
n
cc
cc
I
U
Z
1
3
=
=
=
= 2
1
3 n
cc
cc
I
P
R
⋅
⋅
⋅
⋅
=
=
=
= 2
1
3 n
cc
cc
I
P
R
⋅
⋅
⋅
⋅
=
=
=
=
CÁLCULO PARÁMETROS
CIRCUITO EQUIVALENTE
CÁLCULO PARÁMETROS
CÁLCULO PARÁMETROS
CIRCUITO EQUIVALENTE
CIRCUITO EQUIVALENTE
[
[
[
[ ]
]
]
]
'
X
X
,
'
X R
S
R +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 6
0 [
[
[
[ ]
]
]
]
'
X
X
,
'
X R
S
R +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 6
0
[
[
[
[ ]
]
]
]
'
X
X
,
'
X R
S
R +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 7
0 [
[
[
[ ]
]
]
]
'
X
X
,
'
X R
S
R +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 7
0
'
X
X R
S =
=
=
= '
X
X R
S =
=
=
=
[
[
[
[ ]
]
]
]
'
X
X
,
X R
S
S +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 4
0 [
[
[
[ ]
]
]
]
'
X
X
,
X R
S
S +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 4
0
[
[
[
[ ]
]
]
]
'
X
X
,
X R
S
S +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 3
0 [
[
[
[ ]
]
]
]
'
X
X
,
X R
S
S +
+
+
+
⋅
⋅
⋅
⋅
=
=
=
= 3
0
'
X
X R
S =
=
=
= '
X
X R
S =
=
=
=
XS y XR’
X
XS
S y
y X
XR
R’
’ Regla empírica según tipo de motor
Regla empírica según tipo de motor
Regla empírica según tipo de motor
MOTOR CLASE A:
MOTOR CLASE A:
MOTOR CLASE A:
MOTOR CLASE B:
MOTOR CLASE B:
MOTOR CLASE B:
MOTOR CLASE C:
MOTOR CLASE C:
MOTOR CLASE C:
MOTOR CLASE D:
MOTOR CLASE D:
MOTOR CLASE D:
RS Se obtiene por medición directa
sobre los devanados del estator
R
RS
S Se obtiene por medición directa
Se obtiene por medición directa
sobre los devanados del estator
sobre los devanados del estator](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-59-320.jpg)
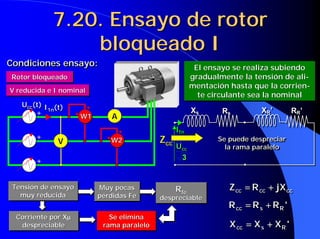
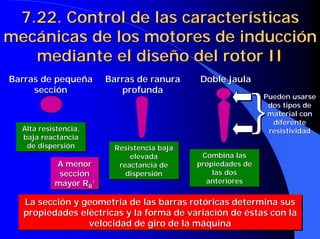
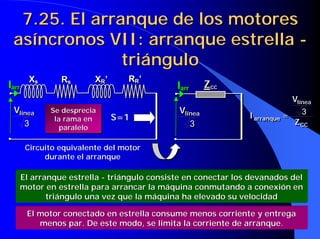
![7.22. Control de las características
7.22. Control de las características
mecánicas de los motores de inducción
mecánicas de los motores de inducción
mediante el diseño del rotor I
mediante el diseño del rotor I
Resistencia
Resistencia rotórica
rotórica creciente
creciente
S
STMAX1
TMAX1
S
STMAX2
TMAX2
S
STMAX3
TMAX3
Par
Par
S
S
EL RENDIMIENTO DEL MOTOR
ES BAJO
EL RENDIMIENTO DEL MOTOR
EL RENDIMIENTO DEL MOTOR
ES BAJO
ES BAJO
Si la resistencia rotórica es elevada
el par de arranque del motor
también lo es
Si la resistencia
Si la resistencia rotórica
rotórica es elevada
es elevada
el par de arranque del motor
el par de arranque del motor
también lo es
también lo es
Si la resistencia rotórica es elevada
el par máximo del motor aparece
con deslizamiento elevado
Si la resistencia
Si la resistencia rotórica
rotórica es elevada
es elevada
el par máximo del motor aparece
el par máximo del motor aparece
con deslizamiento elevado
con deslizamiento elevado
[
[
[
[ ]
]
]
] g
mi P
S
P ⋅
⋅
⋅
⋅
−
−
−
−
=
=
=
= 1
[
[
[
[ ]
]
]
] g
mi P
S
P ⋅
⋅
⋅
⋅
−
−
−
−
=
=
=
= 1
Si el deslizamiento es elevado la
potencia mecánica interna es baja
Si el deslizamiento es elevado la
Si el deslizamiento es elevado la
potencia mecánica interna es baja
potencia mecánica interna es baja](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-68-320.jpg)


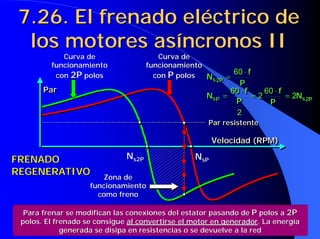
![7.25. El arranque de los
7.25. El arranque de los
motores asíncronos III
motores asíncronos III
[
[
[
[ ]
]
]
]2
2
'
X
X
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
[
[
[
[ ]
]
]
]2
2
'
X
X
S
'
R
R
V
'
I
R
th
R
th
th
R
+
+
+
+
+
+
+
+
+
+
+
+
=
=
=
=
[ ] [ ]2
2
'
X
X
'
R
R
V
'
I
R
th
R
th
th
arranque
R
+
+
+
=
[ ] [ ]2
2
'
X
X
'
R
R
V
'
I
R
th
R
th
th
arranque
R
+
+
+
=
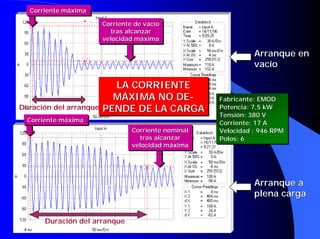
PAR DE ARRANQUE
PAR DE ARRANQUE
Par de un motor asíncrono.
En el arranque S=0
Par de un motor asíncrono.
Par de un motor asíncrono.
En el arranque
En el arranque S=0
S=0
Corriente rotórica.
En el arranque S=0
Corriente
Corriente rotórica
rotórica.
.
En el arranque
En el arranque S=0
S=0
[
[
[
[ ]
]
]
]2
2
2
3
'
X
X
S
'
R
R
S
'
R
V
P
T
R
th
R
th
R
th
S
S
g
i
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
[
[
[
[ ]
]
]
]2
2
2
3
'
X
X
S
'
R
R
S
'
R
V
P
T
R
th
R
th
R
th
S
S
g
i
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
[
[
[
[ ]
]
]
] [
[
[
[ ]
]
]
]2
2
2
3
'
X
X
'
R
R
'
R
V
P
T
R
th
R
th
R
th
S
S
g
Arranque
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
[
[
[
[ ]
]
]
] [
[
[
[ ]
]
]
]2
2
2
3
'
X
X
'
R
R
'
R
V
P
T
R
th
R
th
R
th
S
S
g
Arranque
+
+
+
+
+
+
+
+
+
+
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
Ω
Ω
Ω
Ω
=
=
=
=
2
3
Arranque
R
R
S
Arranque '
I
'
R
T ⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=
2
3
Arranque
R
R
S
Arranque '
I
'
R
T ⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
Ω
Ω
Ω
Ω
=
=
=
=](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-81-320.jpg)


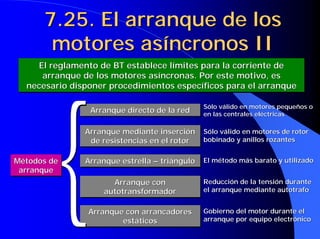
![7.27. Cálculo de tiempos de
7.27. Cálculo de tiempos de
arranque y frenado
arranque y frenado
∫ ⋅
= dm
r
J 2
∫ ⋅
= dm
r
J 2 2
m
Kg ⋅
2
m
Kg ⋅
Momento de inercia de un
Momento de inercia de un
cuerpo de masa
cuerpo de masa m
m respecto a
respecto a
un eje.
un eje. r
r es la distancia al eje
es la distancia al eje
[ ]dt
d
J
J
T
T arg
c
mot
R
ω
ω
ω
ω
+
=
− [ ]dt
d
J
J
T
T arg
c
mot
R
ω
ω
ω
ω
+
=
−
Ecuación de la dinámica de rotación:
Ecuación de la dinámica de rotación:
T
T es el par motor,
es el par motor, T
TR
R el par
el par
resistente
resistente J
Jmot
mot el momento de
el momento de
inercia del motor,
inercia del motor, J
Jcarg
carg el de la carga
el de la carga
y
y ω
ω
ω
ω
ω
ω
ω
ω la pulsaci
la pulsació
ón de giro
n de giro
ω
ω
ω
ω
ω
ω
ω
ω
d
T
T
J
J
t
nominal
R
arg
c
mot
arranque ⋅
−
+
= ∫
0
ω
ω
ω
ω
ω
ω
ω
ω
d
T
T
J
J
t
nominal
R
arg
c
mot
arranque ⋅
−
+
= ∫
0
Integrando la
Integrando la
ecuación se obtiene
ecuación se obtiene
el tiempo de
el tiempo de
arranque
arranque
[ ]
ω
ω
ω
ω
ω
ω
ω
ω
d
T
T
T
J
J
t
nominal
freno
R
arg
c
mot
frenado ⋅
+
−
+
= ∫
0
[ ]
ω
ω
ω
ω
ω
ω
ω
ω
d
T
T
T
J
J
t
nominal
freno
R
arg
c
mot
frenado ⋅
+
−
+
= ∫
0 T
TR
R+
+ T
Tfreno
freno es el par
es el par
resistente total si se
resistente total si se
incluye un
incluye un
procedimiento
procedimiento
adicional de frenado
adicional de frenado](https://image.slidesharecdn.com/tema7maquinaasincronauniovi-230228174155-88413a79/85/Tema7-maquina-asincrona-UNIOVi-pdf-93-320.jpg)