Descargar para leer sin conexión


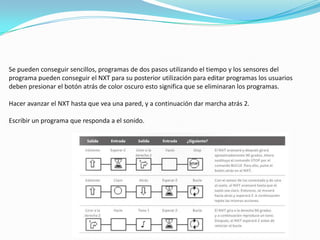


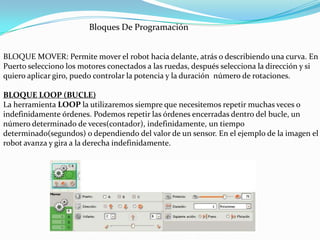

El documento proporciona instrucciones para acceder a la pantalla de programación del robot NXT y describe algunos iconos de programación disponibles. También presenta ejemplos de programas sencillos que usan sensores y tiempo, incluido un programa que hace que el NXT avance hasta una pared y retroceda 2 pasos, y uno que responde al sonido.
























































