Este documento presenta los conceptos básicos de los sistemas lineales e invariantes en el tiempo (LIT). Explica que un sistema procesa señales de entrada para generar señales de salida, y que los sistemas LIT cumplen con las propiedades de linealidad, homogeneidad, aditividad e invarianza temporal. También describe que la respuesta de un sistema LIT ante cualquier entrada puede calcularse mediante la convolución de la señal de entrada con la respuesta a la muestra unitaria del sistema.


![Sistemas
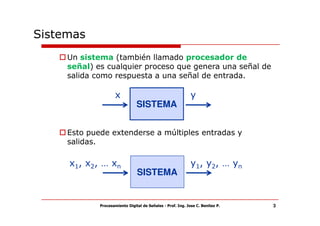
En función de la distribución temporal de las señales que
procesa existen dos tipos de sistemas:
Sistemas continuos: procesan señales en tiempo
continuo.
x(t) y(t)
SISTEMA
Sistemas discretos: procesan señales en tiempo discreto.
x[n] y[n]
SISTEMA
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 4](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-4-320.jpg)
![Sistemas
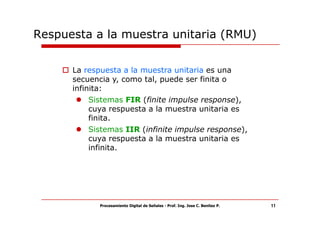
Nos centraremos en los segundos por lo que,
en adelante, cuando se hable de sistema nos
referiremos a sistemas en tiempo discreto.
x[n] SISTEMA y[n]
h[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 5](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-5-320.jpg)
![Sistemas
El flujo de señal a través de un sistema puede
representarse de dos formas. Suponiendo que la señal de
entrada es x[n] y la de salida es y[n] podemos decir que:
x[n] produce y[n]: lo que denotaremos como
x[n] → y[n]
y[n] es la respuesta ante x[n]: lo que denotaremos como
y[n] = T{x[n]}
Ambas representaciones son equivalentes.
x[n] y[n]
SISTEMA
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 6](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-6-320.jpg)

![Ecuación de recurrencia
Sistema recursivo: y[n] depende de sí misma:
y[n] = x[n] + 3y[n - 1]
Sistema no recursivo: y[n] depende sólo de x[n]:
y[n] = 2x[n] - x[n - 1]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 8](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-8-320.jpg)

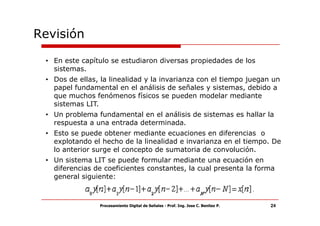
![Respuesta a la muestra unitaria (RMU)
La respuesta a la muestra unitaria (también
llamada respuesta al impulso o respuesta
impulsional) es la respuesta del sistema ante la
secuencia muestra unitaria o secuencia delta:
h[n] = T{δ[n]}
La RMU de un determinado sistema caracteriza
inequívocamente su comportamiento ante
cualquier entrada, por lo que constituye un
modelo del mismo.
δ[n] h[n] x[n] SISTEMA y[n]
SISTEMA
h[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 10](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-10-320.jpg)
![RMU
¿Un sistema recursivo es siempre de tipo IIR?. No siempre?
y[n] = x[n] - 0,25x[n - 2] + 0,5y[n - 1]
h[n] = d[n] - 0,25d[n - 2] + 0,5h[n - 1]
h[0] = d[0] - 0,25d[-2] + 0,5h[-1] = 1
h[1] = d[1] - 0,25d[-1] + 0,5h[0] = 0,5
h[2] = d[2] - 0,25d[0] + 0,5h[1] = 0
h[3] = d[3] - 0,25d[1] + 0,5h[2] = 0
h[4] = d[4] - 0,25d[2] + 0,5h[3] = 0
...
¿Un sistema recursivo es siempre de tipo FIR?. No siempre?
y[n] = x[n] – 2 x[n - 3] + 2 y[n - 2]
Graficar las respuestas de los sistemas recursivos dados.
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 12](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-12-320.jpg)

![Sistemas LIT
Un sistema cumple la propiedad de homogeneidad
(también llamada de escalado) si un cambio de amplitud
en la entrada produce el mismo cambio de amplitud en la
salida:
T{Ka[n]} = KT{a[n]
Un sistema cumple la propiedad de aditividad si dos
señales sumadas lo atraviesan sin interactuar entre ellas:
T{a[n] + b[n]} = T{a[n]} + T{b[n]}
Así, si un sistema es homogéneo y aditivo cumple el
principio de superposición; el cual puede formularse
como:
T{Ka[n] + Lb[n]} = KT{a[n]} + LT{b[n]}
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 14](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-14-320.jpg)
![Sistemas LIT
Un sistema es invariante con el tiempo si un
desplazamiento en la señal de entrada produce otro
desplazamiento igual en la señal de salida. Es decir,
si se cumple que:
y[n] = T{x[n]} => T{x[n - k]} = y[n - k]
Cuando un sistema cumple todas estas propiedades
se dice que es lineal e invariante con el tiempo
(LIT).
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 15](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-15-320.jpg)
![Sistemas LIT
En los sistemas LIT, la respuesta ante cualquier
entrada puede calcularse como la convolución de la
señal de entrada y de su respuesta a la muestra
unitaria.
Esto se refleja en lo que se conoce como ecuación de
convolución:
y[n] = T{x[n]} = x[n] * h[n] = Σk=-∞,∞ x[k]h[n - k]
x[n] SISTEMA y[n]
h[n]
y[n]=x[n] * h[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 16](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-16-320.jpg)
![Otras propiedades de los sistemas
Un sistema no tiene memoria si y sólo si la muestra
de salida para cualquier valor de n depende
exclusivamente de la muestra de entrada para ese
valor.
Un ejemplo de este tipo de sistemas sería el sistema
amplificador en el que:
y[n] = Gx[n], siendo G una constante
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 17](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-17-320.jpg)
![Otras propiedades de los sistemas
Un sistema es causal si y sólo si cumple el principio
de causalidad.
Este principio dice que el efecto no puede preceder a
la causa.
En un sistema esto se traduce en que la muestra de
salida y[n] sólo puede calcularse a partir de las
muestras anteriores.
Formalmente, un sistema es causal si y sólo si su
respuesta a la muestra unitaria lo es:
T{} es causal ↔ T{d[n]} = 0, n < 0
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 18](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-18-320.jpg)
![Otras propiedades de los sistemas
Un sistema es estable si y sólo si cualquier
secuencia acotada a su entrada produce otra
secuencia a su salida también acotada.
Esto es equivalente a decir que un sistema es
estable si y sólo si su respuesta a la muestra
unitaria es módulo sumable:
T{} es estable ↔ Σn=-∞,∞ |h[n]| < ∞
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 19](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-19-320.jpg)
![Conexión sistemas LIT
h1[n] h2[n]
Si dos sistemas LIT (definidos por h1[n] y
h2[n]) se encuentran conectados en serie, la
respuesta a la muestra unitaria del sistema,
equivalente h3[n] es la convolución de h1[n] y
h2[n]:
h3[n] = h1[n] * h2[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 20](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-20-320.jpg)
![Conexión sistemas LIT
h1[n]
h2[n]
Si dos sistemas LIT (definidos por h1[n] y
h2[n]) se encuentran conectados en paralelo,
la respuesta a la muestra unitaria del sistema,
equivalente h3[n] es la suma de h1[n] y h2[n]:
h3[n] = h1[n] + h2[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 21](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-21-320.jpg)
![Ecuación en diferencias lineal
Una subclase importante de los sistemas LIT son
aquellos sistemas en que la entrada y la salida
satisfacen una ecuación en diferencias
finitas.
Para ser estrictos debemos hablar de una
ecuación en diferencias lineal con coeficientes
constantes de la forma:
y[n] = Σk=0,Q b[k]x[n - k] - Σk=1,P a[k]y[n - k]
Si se diseña un sistema cuya ecuación de
recurrencia sea una ecuación de este tipo, ese
sistema será: (a) lineal, y (b) invariante con el
tiempo.
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 22](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-22-320.jpg)
![Ecuación en diferencias lineal
Esta ecuación puede expresarse de forma equivalente:
Σk=0,P a[k]y[n - k] = Σk=0,Q b[k]x[n - k] (a[0] = 1)
De manera simplificada, podemos expresar esta ecuación
mediante operaciones de convolución:
b[n] * x[n] = a[n] * y[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 23](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-23-320.jpg)
![Revisión
• Resolver la ecuación en diferencias consiste en
encontrar una expresión para y[n], es decir, generar la
secuencia:
{y(0), y(1), y(2), ....,y(N),...}
• Antes de estudiar apropiadamente los métodos de
solución de una ecuación en diferencias, presentaremos
algunas propiedades importantes de los sistemas
lineales invariantes.
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 25](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-25-320.jpg)
![Revisión
Propiedades de los sistemas LIT.
1 Superposición.
El principio de superposición establece que:
a) Si un sistema se excita con K veces una función, la
respuesta es K veces la respuesta original.
b) Si el sistemas se excita con la suma de dos funciones, la
respuesta es la suma de las respuestas
individuales.
Entrada Salida
x[n] y[n]
Kx[n] Ky[n]
Kx1[n] + Kx2[n] Ky1[n] + Ky2[n]
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 26](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-26-320.jpg)
![Revisión
Propiedades de los sistemas LIT.
2 Desplazamiento.
Si la excitación de un sistema lineal invariante se traslada en el
tiempo, entonces la respuesta se traslada en la misma cantidad:
Entrada Salida
x[n-n0] y[n-n0]
3 Respuesta natural.
Es la respuesta de un sistema cuando se excita con el impulso
digital unitario. La denotamos por: h(n).
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 27](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-27-320.jpg)
![Revisión
Propiedades de los sistemas LIT.
4. Convolución.
Cuando un sistema lineal invariante se excita con una señal
cualquiera: x(n), la respuesta es la convolución entre la entrada
y la respuesta natural, así:
y[n] = conv( x[n] , h[n] )
La convolución de dos funciones de variable discreta: x[n] y
h[n], se define de la siguiente manera:
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 28](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-28-320.jpg)
![Revisión
Propiedades de los sistemas LIT.
A continuación se presenta una deducción poco rigurosa de la
sumatoria de convolución de dos funciones.
Supongamos que la respuesta al impulso unitario es h[n], esto es:
Ahora aplicamos la importante propiedad de la función impulso:
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 29](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-29-320.jpg)
![Revisión
Ahora bien, si sumamos las entradas correspondientes a k desde
menos infinito hasta infinito, tenemos:
Teniendo en cuenta que la entrada así expresada corresponde
a la función: x[n], obtenemos finalmente que:
Entrada Salida
x[n] y[n]=conv(x[n],h[n])
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 30](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-30-320.jpg)

![Revisión
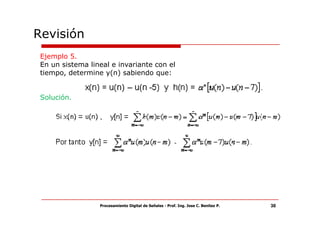
Ejemplo 3.
Si la señal de entrada: x[n]= 3 δ(n-2) se aplica a un
sistema lineal, causal e invariante con el tiempo la
salida es:
para n >=2.
Encontrar la respuesta al impulso, h[n] del sistema.
Solución:
Por definición, h[n] es la respuesta del sistema a la
entrada δ[n]. Como el sistema es lineal e invariante
con el tiempo, se tiene:
x[n+2] = 3 δ[n], o sea que δ[n] = 1/3 x[n+2]. Como
la convolución de h[n] con δ[n] es por definición igual
a h[n] , se tiene que h[n] = 1/3 y[n+2].
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 33](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-33-320.jpg)
![Revisión
La salida se puede expresar en la siguiente forma:
De forma que, h[n] = 1/3 y[n+2]:
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 34](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-34-320.jpg)

![Revisión
Puede notarse que u(n - k)=1 para K = 0,1,2,....n con lo que
podemos escribir;
Simplificando y denotando la convolución por y1(n), se obtiene y1[n]=
2(1-2-(n+1))u(n).
Para el caso b), se obtiene: x2[n]= u(n)-u(n-5).
Por tanto, usando la propiedad de traslación y el resultado anterior,
tenemos:
y2[n]= y1[n]-y1[n-5].
y2[n]= 2(1-2-(n+1))u(n)- 2(1-2-(n-5+1))u(n-5).
Simplificado, se encuentra que: y2[n]= 2(1-2-(n+1))u(n)- 2(1-24-n)u(n-5).
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 36](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-36-320.jpg)
![Revisión
Si se hacen las
correspondientes
asignaciones, se tiene
que:
y1[n]= 2(1-2-(n+1))u(n).
y2[n]= 2(1-2-(n+1))u(n)-
2(1-24-n)u(n-5).
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 37](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-37-320.jpg)
![Revisión
Se sabe que u(m) u( n-m) =1 para y 0 para otra asignación.
Se sabe que u(m-7) u(n-m) = 1 para y 0 para otra asignación.
Por tanto
Cuando la excitación es u[n-5], la respuesta será y[n-5]. Por tanto,
para la excitación dada, la respuesta es:
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 39](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-39-320.jpg)
![Revisión
Ejercicios
1. Sean
calcule las siguientes convoluciones:
a) x [n]* h[n]
b) x [n]* h[n-2]
c) x[n-2]* h[n]
2. Considere una entrada y una respuesta al impulso unitario dado
por:
determine y dibuje la salida y[n] .
3. Calcule y dibuje y[n] = x[n] * h[n] donde
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 40](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-40-320.jpg)
![Revisión
4. Sea:
es un entero.
Determine y[n] = x[n] * h[n] si y[4] = 5 y y[14] = 0
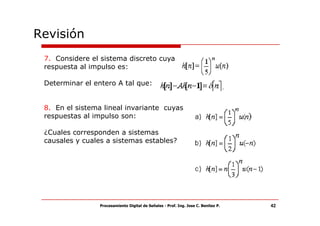
5. Un sistema lineal invariante con el tiempo se excita con el impulso
digital unitario y su respuesta es:
Determine y[k] sabiendo que
x[k]= u(k)-u(k-4). Represente x[k] y
6. Un sistema lineal S tiene la relación :
donde g[n]=u(n)-u(n-4).
Determine y[n] cuando:
Procesamiento Digital de Señales - Prof. Ing. Jose C. Benitez P. 41](https://image.slidesharecdn.com/utppdss5y6sistemaslit-110714105543-phpapp02/85/Utp-pds_s5y6_sistemas_lit-41-320.jpg)



































![Utp pds_s11_filtros [modo de compatibilidad]](https://cdn.slidesharecdn.com/ss_thumbnails/utppdss11filtrosmododecompatibilidad-110921203133-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)







































