

Recomendados
Más contenido relacionado
Más de Teletón Paraguay
Más de Teletón Paraguay (20)
Último
Último (20)
5) alta tecnología gil agudo
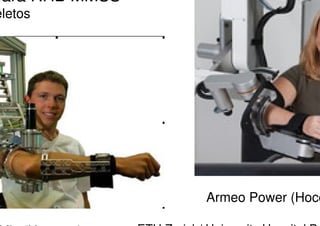
- 1. para RHB MMSS eletos Armeo Power (Hoco
- 2. olz J, Platz T, Kugler J, Pohl M. Electromechanical a ssited training for improving arm function and activitie ving after stroke. Cochrane Database of Systematic ws 2008, Issue 4 Art. No.: CD006876. ayos clínicos con 328 pacientes en total mejoría en AVD joría en los aspectos de fuerza y función motora rosas publicaciones sobre tecnología electromecánic
- 3. i-Gheidari N, Archambault PS, Fung J. Effects of rob d therapy on stroke rehabilitation in upper limbs: sy and meta-analysis of the literature. J Rehabil Res De 9(4):479-96. e 574 estudios, 12 estudios cumplieron criterios la duración de la terapia convencional (TC) es similar ia asistida por robot (TR) no diferencias (recuperació AVDs, fuerza) ocia TR a TC es más beneficioso que TC sola
- 6. dividuals with SCI regardless of training ap Eng Rehabil 2009;6:36 encuentra diferencias en la calidad (análisis cinemático d a marcha tras el tratamiento con cualquiera de los 4 métod wietz, Moffat. Effects of locomotor training after cord injury: a systematic review. Arch Phys Me 94:2297-308. CT. No hay clara superioridad de las terapias analizadas. n-Ruz A, et al (HNP) A comparison of robot y and conventional walking therapy in indivi versus lower motor neuron lesions. Arch
- 9. uenazzi (J Spinal Cord Med 2012) s et al. (Am J PMR 2102) 12 SCI
- 11. n ACV ersion group =11 / CG=11 de 20 min ulation Category (FAC)
- 12. obótica ealidad virtual rain computer interface ES euromodulación
- 13. lidad virtual (RV) La RV es una simulación de un ento generada por ordenador en la que, a través de una inte bre-máquina, se va a permitir al usuario interactuar con os elementos dentro del escenario simulado
- 14. La RV es uno de los sistemas más innovadores y prometedores, que se prevé tendrá un impacto considerable en REHABILITACIÓN en los próximos 10 años
- 15. ovimientos son suficientemente similar Viau A et al. J NeuroEng and Rehabil 2004 Subramanian S et al. J NeuroEng and Rehabil 2007. habilitación mediante RV podría inducir anización cortical Holden MK. CyberPsychology & Behavior 2005 Sveistrup H. J NeuroEng and Rehabil 2004 Merians AS et al. Neurorehabil Neural Repair 2006. os resultados al transferir habilidades ridas Fidopiastis et al. CyberPsychology & Behavior 2006. Kuttuva M et al. CyberPsychology & Behavior 2006. Holden M, Dyar T. Neurology Report 2002
- 16. Sistema IREX
- 17. tema Curictus
- 23. obótica ealidad virtual rain computer interface ES euromodulación
- 24. cción del paciente con el no mediante la señal ral en lugar de la actividad ular. Señal ofisiológica (EEG) para leccionar comandos (“si” o o”) que controlan un cursor de n monitor ntrolar dispositivo europrótesis en MMSS urar función motora endo plasticidad cerebral ndiente de la actividad
- 26. artefactos craneotomía y de oquirúrgico da de registro
- 27. gía dad señal
- 30. de control de entorno