
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Me canismos1920
Similar a Me canismos1920 (20)
Más de Yolanda Tamudo
Más de Yolanda Tamudo (20)
Último
Último (20)
Me canismos1920
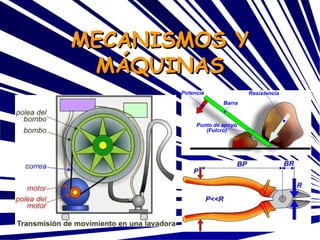
- 3. 2 – La palanca. Ley de la2 – La palanca. Ley de la palanca.palanca.
- 5. Cuando la palanca está en equilibrio se cumple:Cuando la palanca está en equilibrio se cumple: F · BF · BFF = R · B= R · BRR – F: (fuerza) es la fuerza o potencia que se aplica.F: (fuerza) es la fuerza o potencia que se aplica. Se mide enSe mide en NEWTONS (N) o en o enNEWTONS (N) o en o en Kiloppondio (Kp)Kiloppondio (Kp) – R: (resistencia) es la fuerza que se vence.Se mide enR: (resistencia) es la fuerza que se vence.Se mide en NEWTONS (N)NEWTONS (N) o en Kiloppondio (Kp)o en Kiloppondio (Kp) – B: (brazo) es la distancia del punto de aplicación de laB: (brazo) es la distancia del punto de aplicación de la fuerza al punto de apoyo o fulcrofuerza al punto de apoyo o fulcro.Se mide en.Se mide en METROS o en cmsMETROS o en cms 1Kp= peso en kg* 10 1kp= 9,8 N
- 6. Calcula el valor de la fuerza (F) que será necesario aplicar para vencer la resistencia (R). a. ¿Se trata de una palanca con ventaja mecánica? ¿Qué tipo de palanca es?
- 7. Tipos de palancasTipos de palancas Según se sitúen la fuerza, el apoyo y la resistencia,Según se sitúen la fuerza, el apoyo y la resistencia, las palancas se clasifican enlas palancas se clasifican en tres tipostres tipos:: DeDe primer gradoprimer grado: el apoyo se sitúa entre la fuerza: el apoyo se sitúa entre la fuerza y la resistencia. Ej: tijeras.y la resistencia. Ej: tijeras.
- 8. DeDe segundo gradosegundo grado: la resistencia se sitúa entre: la resistencia se sitúa entre el apoyo y la fuerza. Ej: carretilla.el apoyo y la fuerza. Ej: carretilla.
- 10. DeDe tercer gradotercer grado: la fuerza se sitúa entre el: la fuerza se sitúa entre el apoyo y la resistencia. Ej: pinzas.apoyo y la resistencia. Ej: pinzas.
- 11. Momento de una fuerza Cuando una fuerza actúa sobre un cuerpo capaz de girar sobre un eje, produce un movimiento de rotación o giro. La magnitud que mide la intensidad del giro se denomina momento torsor, (es algo así como la intensidad o potencia del empuje que hace girar el cuerpo).
- 12. Matemáticamente se calcula mediante la expresión
- 17. 3 – Poleas y polipastos3 – Poleas y polipastos UnaUna poleapolea es una rueda con una hendidura en laes una rueda con una hendidura en la llanta por donde se introduce una cuerda o unallanta por donde se introduce una cuerda o una correa.correa.
- 18. UnUn polipastopolipasto es una combinación de poleases una combinación de poleas que permite levantar un gran peso haciendoque permite levantar un gran peso haciendo muy poca fuerza. Está formado por una poleamuy poca fuerza. Está formado por una polea fija y otra móvil.fija y otra móvil.
- 19. 4 –4 – Mecanismos de transmisiónMecanismos de transmisión de movimientode movimiento Estos mecanismos “transforman” movimientos deEstos mecanismos “transforman” movimientos de rotación en otros movimientos de rotaciónrotación en otros movimientos de rotación La principal utilidad de este tipo de mecanismos radica enLa principal utilidad de este tipo de mecanismos radica en poder aumentar o reducir la velocidad de giro de un ejepoder aumentar o reducir la velocidad de giro de un eje tanto cuanto se desee.tanto cuanto se desee.
- 20. Conceptos previos: Velocidad de giro o velocidad angular: Es la velocidad a la que gira una rueda o un eje. Si se expresa en r.p.m (revoluciones por minuto) se utiliza la letra N, si se expresa en radianes por segundo se utiliza la letra ω 1 revolución = 2π radián 1 minuto = 60 segundos. Rueda motriz o conductora, es la que inicia el movimiento, normalmente unida al motor.
- 21. Rueda conducida, es la que es impulsada por la rueda motriz a través de algún sistema de transmisión Mecanismo multiplicador, cuando se aumenta la velocidad, la rueda motriz debe ser mas grande que la conducida. Mecanismo reductor, reduce la velocidad y aumenta la fuerza, la rueda motriz es mas pequena que la conducida. Relación de transmisión, es la relación que existe entre la velocidad de la rueda conducida y la velocidad de la rueda motriz. Piñón, se suele llamar asi a la rueda de menor tamaño Momento torsor o par motor o par de fuerzas, es la fuerza con la que gira una rueda o eje. Se representa por la letra M y se mide en N・m
- 22. Para desempenar su misión, las maquinas disponen de partes móviles encargadas de transmitir la energia y el movimiento de las maquinas motrices a otros elementos. Estas partes móviles son los elementos transmisores, que pueden ser directos e indirectos. Elementos transmisores directos: - Arboles y ejes - Ruedas de friccion - Engranajes - Tornillo sinfin Elementos transmisores indirectos: - Poleas con correa - Cadenas
- 23. 4.1.–4.1.– Arboles y ejesArboles y ejes Un eje eje es un elemento, normalmente cilíndrico, que gira sobre si mismo y sirve para sostener diferentes piezas sustentan (sostienen o soportan) los órganos giratorios de las maquinas no transmiten potencia (se dice que no estan sometidos a esfuerzos de torsion),
- 24. Un árbol es un elemento de una maquina, cilindrico o no, sobre el que se montan diferentes piezas mecanicas, por Pueden adoptar diferentes formas (rectos, acodados, Flexibles, …). Los arboles (tambien llamados árboles de transmisión) giran siempre junto con los organos soportados.
- 25. 4.2.–4.2.– Ruedas de fricciónRuedas de fricción Son elementos de máquinas que transmiten un movimiento circular entredos ejes gracias a la fuerza de rozamiento entre dos ruedas que se encuentran en contacto directo. El sentido en el que giran las ruedas es contrario.
- 26. Características - Los materiales que se utilizan tienen un alto coeficiente de rozamiento para evitar que las ruedan resbalen entre si. - Normalmente estas ruedas de fricción se emplean en arboles de transmisión muy cercanos y cuando la potencia que hay que transmitir es pequeña - Este tipo de transmisión tiene la ventaja de que es muy facil de fabricar, no necesita apenas mantenimiento y no produce ruidos
- 27. Ruedas de fricción exteriores: Tienen forma cilindrica. En ellas, el contacto se produce entre sus superficies exteriores. Estas ruedas giran en sentido inverso una de la otra.
- 28. Ruedas de fricción interiores: forma cilindrica, el contacto se produce entre la superficie interior de la rueda mayor y la exterior de la rueda menor. Ambas giran en el mismo sentido.
- 29. Ruedas de fricción troncocónicas: Tienen forma de tronco de cono y el contacto se produce entre sus superficies laterales. Se utilizan cuando los arboles de transmision no son paralelos. Como en el caso de las ruedas exteriores, tambien producen la inversion de giro
- 35. Transmisión por engranajesTransmisión por engranajes Para que dos ruedas dentadas engranen, el tamaño de losPara que dos ruedas dentadas engranen, el tamaño de los dientes deben ser iguales. Eldientes deben ser iguales. El número de dientesnúmero de dientes sese representa porrepresenta por ZZ y lay la velocidad de girovelocidad de giro concon nn y se mide eny se mide en revoluciones por minuto (revoluciones por minuto (rpmrpm).). Siempre se cumple:Siempre se cumple: Donde:Donde: ZZ11 = número de dientes de la rueda conductora.= número de dientes de la rueda conductora. 11 = velocidad de la rueda conductora (rpm).= velocidad de la rueda conductora (rpm). ZZ22 = número de dientes de la rueda conducida.= número de dientes de la rueda conducida. 22 = velocidad de la rueda conducida (rpm).= velocidad de la rueda conducida (rpm).
- 40. Engranajes de dientes rectos. Son fáciles de fabricar, pero tienen el inconveniente de ser muy ruidosos y producir vibraciones. En un determinado instante solo está engranado un diente en el hueco del otro y alpasar al siguiente se produce un golpeteo Se emplean cuando la potencia que se va a transmitir y el número de revoluciones con que giran no es muy grande. Las características de los engranajes de dientes rectos son:
- 42. - Circunferencia primitiva. Es el conjunto de puntos por donde se produciría el contacto si para la misma relación de transmision se usaran ruedas de fricción (diámetro primitivo Dp) - Circunferencia interior. Es la circunferencia original donde se apoya el diente (Diámetro interior Di) - Circunferencia exterior. Limita los dientes por la parte exterior (Diámetro exterior De)
- 43. Paso circular . Es la distancia entre dos puntos iguales de dos dientes consecutivos, medidas sobre la circunferencia primitiva Altura del diente . Altura de la cabeza del diente =Rext- R primitivo Altura del pie del diente = R p-Rint
- 46. Medidas del diente en función del módulo Altura de la cabeza del diente y del pie se definen a partir del módulo Según como sean los dientes cortos o largos estos valores son Los módulos se encuentran normalizados
- 51. Dientes helicoidales Engranajes entre dientes helicoidales Engranajes entre dientesEngranajes entre dientes helicoidaleshelicoidales Varios dientes están engranados a la vez por lo que el esfuerzo de flexion se reparte entre ellos durante la transmision y posibilidades de rotura son menores. Ademas, asi se disminuye el ruido durante el funcionamiento. Al estar inclinados los dientes se produce una fuerza axial (en el sentido de los ejes) sobre los cojinetes de apoyo del eje.
- 52. Dientes helicoidales Engranajes entre dientes helicoidales Engranajes entre dientesEngranajes entre dientes en Ven V Estos engranajes conservan las ventajas de los anteriores con un diseno que contrarresta las fuerzas axiales.
- 53. Al igual que ocurría con las ruedas de fricción, los engranajes también pueden ser interiores y cónicos:
- 54. Tornillo sin fin y ruedaTornillo sin fin y rueda Transmite el movimiento entre ejes perpendiculares.Transmite el movimiento entre ejes perpendiculares. Con cada vuelta del tornillo la rueda avanza un diente. ElCon cada vuelta del tornillo la rueda avanza un diente. El sistema es irreversible.sistema es irreversible.
- 55. Solo se puede transmitir el movimiento del tornillo a la rueda dentada y nunca al revés Permite la transmisión de esfuerzos muy grandes. Relación de transmisión muy baja. Reduce mucho la velocidad
- 57. Al número de roscas de un tornillo sinfin se le llama número de entradas. Este valor determina la velocidad de giro de la corona de salida.
- 63. Transmisión por correaTransmisión por correa Este mecanismo está basado en dos poleas Se usa cuando la distancia entre ejes el grande. Los ejes de las dos poleas tienen que ser paralelos el sentido de giro de ambas poleas es el mismo pero si cruzamos las correas el sentido cambia.
- 64. Los problemas principales que pueden aparecer en este mecanismo son: Que se produzca deslizamiento, para evitarlo tendremos que disponer de tensores. La rotura de la correa. Entre otras existen los tipos de correas que aparecen en la figura.
- 66. Reductor de velocidad Multiplicador de velocidad
- 70. Transmisión por cadenaTransmisión por cadena EEs un mecanismo compuesto de una cadena y de ruedas dentadas. Se cumple la ecuación de equilibrio de la transmisión por engranajes:
- 72. Una bicicleta tiene dos catalinas de 54 y 42 dientes y 6 piñones de 13, 15, 17, 19,21 Y 25 dientes. Si das siempre 60 pedaladas por minuto y el radio de la rueda de la bicicleta es 40 cm, calcula las velocidades máxima y mínima a las que puedes ir. Resultados: Vmáx=37,6 km/h; Vmín=15,2 km/h
- 74. Mecanismos de transformaciónMecanismos de transformación Son los que cambian el tipo de movimiento. Los más importantes son: Piñón-cremallera. Husillo-tuerca. Biela-manivela. Excéntrica. Cigüeñal. Leva y seguidor..
- 75. Piñón-cremalleraPiñón-cremallera Es un sistema formado por un engranaje llamado piñónEs un sistema formado por un engranaje llamado piñón y una banda dentada llamada cremallera.y una banda dentada llamada cremallera. El movimiento de giro del piñón se transforma en unEl movimiento de giro del piñón se transforma en un movimiento lineal de la cremallera.movimiento lineal de la cremallera.
- 77. Husillo-tuercaHusillo-tuerca Está formado por un eje roscado (husillo) y una tuerca. Transforma el giro de la tuerca en un desplazamiento lineal de la tuerca y viceversa.
- 78. Se denomina avance a la distancia lineal que recorre un elemento rascado cuando se le hace girar una vuelta
- 79. . El trabajo de la fuerza motriz (trabajo = fuerza X trayectoria), cuando el tornillo da una vuelta, es: El trabajo de la fuerza resistente es: WR = R· Avance
- 82. Determina cual es el avance del tornillo si el paso de rosca es de 0,450mm y damos dos vueltas completas a la manivela. (SOL: 0,9mm ) Determina cuantas vueltas deben darse a la manivela del cabezal de un torno para avanzar el tornillo 0,675mm si el paso de la rosca es de 0,450mm. (SOL: 1,5 vueltas)
- 83. Para elevar un coche de 1 500 kg se utiliza un gato basado en el mecanismo tornillo-tuerca, en el que la rosca tiene dos entradas y el paso es 5 mm. Si el brazo de la fuerza es 20 cm y se quiere levantar el coche 20 cm, calcular: al La fuerza que es necesaria para levantar el coche. b] El trabajo realizado. Resultados: a) F = 119,4 N; b) W= 3000 J
- 84. Calcula el tiempo que tardará en desplazarse una tuerca de 2mm de paso sobre un tornillo de dos entradas a lo largo de 16cm, si éste gira a 240rpm. (SOL: 10s)
- 85. ExcéntricaExcéntrica Es una rueda que tiene unaEs una rueda que tiene una barra rígida unida en unbarra rígida unida en un punto de su perímetro.punto de su perímetro. Convierte el movimientoConvierte el movimiento circular en alternativo y a lacircular en alternativo y a la inversa.inversa.
- 86. El cigüeñalEl cigüeñal Transforma simultáneamente un movimiento deTransforma simultáneamente un movimiento de giro en varios movimientos alternativos.giro en varios movimientos alternativos.
- 87. Leva y seguidorLeva y seguidor Transforma el movimiento de giro de la leva en un movimiento lineal alternativo del seguidor. El mecanismo de leva y seguidor se emplea para transformar el movimiento circular en un movimiento rectilíneo alternativo con unas características determinadas que dependen del perfil de la leva. La forma de la leva se diseña según el movimiento que se pretende para el seguidor. Para saber las características del movimiento del seguidor es necesario realizar una gráfica. En los motores de combustión alternativos se emplean levas para efectuar la apertura y cierre de las válvulas que dejan entrar el combustible y salir los gases de la cámara de combustión.
- 88. Las levas pueden tener distintas formas, de disco, cilíndricas y de campana; la más común es la de disco. ENLACE