
Recomendados
Más contenido relacionado
Similar a PPT DINAMICA DE CUERPO RIGIDO.pptx
Similar a PPT DINAMICA DE CUERPO RIGIDO.pptx (20)
Más de DiegoParraTaipe1
Último
Último (20)
PPT DINAMICA DE CUERPO RIGIDO.pptx
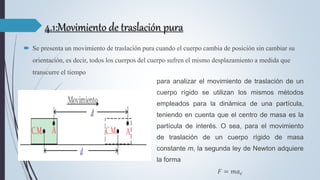
- 1. 4.1:Movimiento de traslación pura Se presenta un movimiento de traslación pura cuando el cuerpo cambia de posición sin cambiar su orientación, es decir, todos los cuerpos del cuerpo sufren el mismo desplazamiento a medida que transcurre el tiempo para analizar el movimiento de traslación de un cuerpo rígido se utilizan los mismos métodos empleados para la dinámica de una partícula, teniendo en cuenta que el centro de masa es la partícula de interés. O sea, para el movimiento de traslación de un cuerpo rígido de masa constante m, la segunda ley de Newton adquiere la forma 𝐹 = 𝑚𝑎𝑐
- 2. Movimiento de rotación pura Un cuerpo rígido posee un movimiento de rotación pura, cuando cambia su orientación mientras se mueve, de tal forma que todas las partículas que lo conforman describen trayectorias circulares con centro en el eje de rotación. En estas condiciones, el centro de rotación permanece fijo respecto a un sistema de referencia fijo en tierra, mientras el cuerpo rota alrededor de un eje fijo que pasa por el punto O, las partículas i y j describen circunferencias concéntricas con centro en el eje que pasa por dicho punto.
- 3. Movimiento combinado de traslación y rotación Un cuerpo rígido puede tener dos movimientos simultáneos uno de traslación y otro de rotación, es decir, el movimiento más general de un cuerpo rígido, se puede considerar como una combinación de traslación y rotación. Como se observa en la figura, el movimiento del cuerpo al pasar de la posición (1) a la posición (2), se puede considerar como una traslación del centro de masa y una rotación alrededor de un eje que pasa a través del centro de masa.
- 4. 4.2: Torque de una fuerza respecto a un punto(ø) Como es sabido, una fuerza F que actúa sobre un cuerpo rígido se puede descomponer en sus componentes rectangulares 𝐹𝑥, 𝐹𝑦 , 𝐹𝑧, que miden la tendencia de la fuerza a desplazar el cuerpo en las direcciones x, y, z, respectivamente. También se sabe que si a un cuerpo rígido se le aplica una fuerza, esta tiende a imprimirle tanto un movimiento de traslación como de rotación, alrededor de un eje que pasa por un punto del cuerpo rígido. Se define el momento o torque t de la fuerza F, respecto al punto O, como el producto cruz o vectorial de los vectores r y F en ese orden, es decir, Como en tres dimensiones el vector posición está dado en componentes rectangulares por 𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧𝑘 y el vector fuerza por 𝑭 = 𝐹𝑥𝑖 + 𝐹𝑦𝑗 + 𝐹𝑧𝑘, se puede determinar el torque de la fuerza, respecto a un eje que pasa por el punto O, mediante el determinante Resolviendo el determinante se obtiene
- 5. Torque de un par de fuerzas o cupla : Son dos fuerzas que actúan simultáneamente sobre un cuerpo rígido y forman un par de fuerzas o cupla si satisfacen simultáneamente las siguientes tres condiciones: Par de fuerzas o cupla. 4.3. Torque de un par de fuerzas o cupla
- 6. 4.3.1. Efectosde traslación de unpardefuerzas Como el efecto de traslación de un par es nulo , ya que son dos fuerzas iguales y de sentido contrario , el único efecto de un par es tender a rotar el cuerpo alrededor de un eje perpendicular al plano definido por las fuerzas . 4.3.2.Efectosde rotaciónde unparde fuerzas Torque de un par de fuerzas o cupla. Al aplicar un par de fuerzas a un cuerpo se produce una rotación o una torsión. La magnitud de la rotación depende del valor de las fuerzas que forman el par y de la distancia entre ambas siguiendo una línea perpendicular, llamada brazo del par.
- 7. 4.4. Descomposición de una fuerza en un sistema fuerza-par En el cuerpo rígido mostrado en la figura ,se desea trasladar el punto de aplicación de la fuerza F del punto A al punto O, sin cambiar los efectos tanto de traslación como de rotación sobre el cuerpo rígido. De acuerdo con el principio de transmisibilidad, se sabe que si la fuerza se desliza a lo largo de su línea de acción, no cambian los efectos de traslación ni de rotación; pero si se desplaza al punto O, por fuera de su línea de acción, se modifican los efectos de rotación sobre el cuerpo rígido, aunque los efectos de traslación permanecen inalterados, ya que no se cambia la magnitud de la fuerza.
- 8. 4.5: RESULTANTE DE UN SISTEMA DE FUERZAS CONCURRENTES
- 9. 1er solución 2 solución ¿Qué valor tiene el momento de la fuerza de 40 kN de la figura respecto al punto A?
- 10. ∑F x = ∑F y = 0 La forma expresa que la suma algebraica de los componentes según los ejes x, y (en el plano de las fuerzas) es cero.
- 11. Ejemplo 4.6: VECTORMOMENTOANGULARDE UN CUERPORÍGIDO
- 12. 4.7: Momentode inercia de un cuerpo rígido Considerando al cuerpo rígido como una distribución continua de masas (dm), la sumatoria se convierte en una integral, así: de donde por ejemplo: 𝝆 = 𝒅𝒎 𝒅𝑽 dm= 𝝆𝒅𝑽
- 13. 4.8: Ejes principales de inercia Los ejes principales de inercia son precisamente las rectas o ejes formadas por vectores propios del tensor de inercia. Tienen la propiedad interesante de que un sólido que gira libremente alrededor de uno de estos ejes no varía su orientación en el espacio. 𝐼𝑥𝑥 𝐼𝑥𝑦 𝐼𝑥𝑧 𝐼𝑦𝑥 𝐼𝑦𝑦 𝐼𝑦𝑧 𝐼𝑧𝑥 𝐼𝑧𝑦 𝐼𝑧𝑧 𝑤𝑥 𝑤𝑦 𝑤𝑧 𝐿= 𝝎 𝑎= 𝑏 => 𝐿=𝜆𝝎 𝜆 ∈ ℝ 𝐿𝑋 𝐿𝑦 𝐿𝑧 𝜆𝟏 𝟎 𝟎 𝟎 𝜆𝟐 𝟎 𝟎 𝟎 𝜆𝟑 𝝎 = 𝑰 𝑎 𝑏 𝜆 = 𝑰 = 𝑰 𝐿 =
- 14. Ejes principales de inercia en un cuerpo esférico En un cuerpo esférico o con simetría esférica, cualquier eje que pase por su centro es un eje principal de inercia. Ejes principales de inercia en un cuerpo cilíndrico Para un cuerpo cilíndrico o con simetría cilíndrica, el eje del cilindro y cualquier eje que sea perpendicular a él, es un eje principal de inercia. Un bloque rectangular tiene tres ejes principales de inercia que son perpendiculares a las caras y pasan a través del centro del bloque Ejes principales de inercia en un cuerpo rectangular 𝑍0 𝑦0 𝑋0 𝑍0 𝑋0 𝑦0 𝑋0 𝑦0
- 15. 4.9: Teorema de Steiner o de los ejes paralelos El teorema de ejes paralelos tiene como principal objetivo que se pueda rotar un objeto con respecto a varios ejes, en las tablas suele expresarse solo el momento de iniciar respecto al eje que puede atravesar el centroide, una de las principales ventajas que da este teorema es la facilidad para poder calcular cuando se necesita hacer girar un cuerpo sobre ejes y estos no pueden coincidir.
- 17. 4.10: Radio de giro de un cuerpo rígido Un radio de giro representa la distancia al eje a la cual una partícula material que tuviese la misma masa que el solido tendría también el mismo momento de inercia, evidentemente el radio de giro determina el momento de inercia y viceversa.
- 18. La rodadura es un caso especial del movimiento de roto-traslación de un cuerpo rígido y se dice que hay rodadura sin deslizamiento si no hay movimiento relativo entre el cuerpo y la superficie en el punto instantáneo de contacto, además establece un vínculo entre los movimiento de traslación y de rotación realizados 4.13 MOVIMIENTO POR RODADURADE UN CUERPORÍGIDO FUERZA DE ROZAMIENTO EN UNA RODADURA
- 19. 4.14: EQUILIBRIODEL CUERPORÍGIDODE ACUERDOCONLA SECCIÓN • Equilibrio de un cuerpo rígido. Para que un cuerpo rígido este en equilibrio estático se deben cumplir dos requisitos simultáneamente, llamados condiciones de equilibrio. 1. Condición de Equilibrio Traslacional : F 0 q uier e de cir q ue F1 F2 2. Condición de Equilibrio Rotacional : 0 q uier e dec ir q ue 1 2