APORTES A LA ARQUITECTURA DE WALTER GROPIUS Y FRANK LLOYD WRIGHT
CELOCIA
1. ELECTRÓNICA E INTRUMENTACIÓN
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE LATACUNGA
PROCESAMIENTO DIGITAL DE SEÑALES
INFORME
REPRESENTACIÓN DE SISTEMA DISCRETOS EN CELOSIA
EDWIN PATRICIO LEMA QUINATOA
eplema1@espe.edu.ec
RESUMEN: El usode losfiltrosen celosíaestámuy
extendido en las aplicaciones de tratamiento de voz
yen la implementacióndefiltrosadaptativos se usa
para la representación de polos y ceros por medio
de diagramas de bloques.
PALABRAS CLAVE
Celosía
Estructura celosía
KEYWORDS
Celosía
lattice structure
INTRODUCION
La estructura de celosía se emplea en el
procesado digital de la voz implementación de
filtros adaptativos también en filtros FIR, y en
el tratamiento de señales geofísicas. Para
derivar la estructura de muestreo en
frecuencia, especificamos la respuesta en
frecuencia deseada en un conjunto de
frecuencias.
OBJETIVOS:
Aprenderla representación Celosía
de unsistema.
CalcularloscoeficientesdeCelosía.
TEORIA:
Aplicación:
Procesado digital de la voz.
Implementación de filtrosadaptativos.
Tratamiento de señalesgeofísicas...
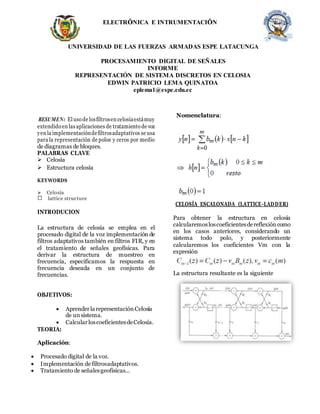
Nomenclatura:
CELOSÍA ESCALONADA (LATTICE-LADDER)
Para obtener la estructura en celosía
calcularemosloscoeficientesdereflexióncomo
en los casos anteriores, considerando un
sistema todo polo, y posteriormente
calcularemos los coeficientes Vm con la
expresión
La estructura resultante es la siguiente
2. ELECTRÓNICA E INTRUMENTACIÓN
La estructura en celosía (lattice), ampliamente
utilizada en el procesado de voz, se caracteriza
por su robustez numérica y modularidad para
su implementación, lo que la hace muy
adecuada para la implementación de filtros.
La realización de sistemas FIR (todo-ceros) en
EJEMPLO 1:
LIBRO DE SORIA.
4.4. Obtenga los coeficientes de la celosía
correspondiente al filtro FIR con función de
transferencia
A(z) 1
3
z 1
1
z 2
1
z 3
celosía se hacea partirde la etapa básica
representada en la Figura4.3.
Resolución
4 2 4
Fig.4.3M-ésima etapadelarealizacióndeun
sistema.
Para esta etapa tenemos que las salidas son,
La estructura encelosía se usa ampliamenteen
procesado digital de la voz y en la realización
de filtros adaptativos. Un sistema en celosía
presenta una serie de etapas en cascada como
la representada en la Figura 4.12 (b), donde el
filtro describe el conjunto de ecuaciones
siguiente
fm (n) fm1 (n) km gm1 (n1) F (z) G (z) X(z) (4.5)
gm (n) km fm1 (n) gm1 (n1)
0 0
Fm (z) Fm1 (z) Kmz 1
Gm1 (z),
LosEjercicios4.4 y 4.5ilustranla obtención de
los coeficientes de la celosía a partir de los
m=1, 2, M– 1 (4.6)
coeficientesde la forma directa deunfiltroFIR.
Cualquier sistema todo-polos H(z) = l/A(z)
puede realizarse en celosía simplemente, a
Gm (z) Km Fm1
(z) z1
G m1(z)
partir de la realización en celosía del sistema
FIR H'(z)=A(z), sin más que intercambiar la
entrada con la salida.
Fig.4.4Etapa básica delacelosía paraun
sistema IIR todo-polos.
En general, un sistema IIR utilizará la misma
etapa básica que un sistema IIR todo-polos,
Figura 4.4,peroeneste casola salida resulta de
una combinación lineal de las secuencias:
gi (n),i 0, N.
3. ELECTRÓNICA E INTRUMENTACIÓN
m=1, 2, M– 1 (4.7)
Donde Km es el parámetrodecelosía de la
etapa m-ésima, también
denominados coeficientes de
reflexión por ser idénticosa los coeficientes
de reflexiónintroducidos en el test
de estabilidad de Schür-Cohn.
Las Ecuaciones (4.6) y (4.7) describen el
comportamientodela etapa m-ésima,donde
las entradas son Fm_1(z) y
Gm_1(z), proporcionándolas salidas Fm(z) y
Gm(z). En conjunto, las Ecuaciones (4.5) a
(4.7) son un conjunto de ecuaciones
recursivas que describen el filtro en celosía.
Como vemos, Figura 4.12(a), en la primera
etapa, la entrada x(n) está conectada a f0(n)
y g0(n), y la salida f(n) de la última etapa se
considera la salida delfiltro.
4. INSTRUMENTOS Y SENSORES
z B
z B
0
Dado que el sistema tiene dos salidas, F (Z) y A (z) 1
3
z1
1
z2
1
z3
M 3
4 2 4
GM(Z), y una única entrada, X(z), podemos
diferenciar dos funciones de transferencia: 3 (0) 3 (1)z1
(2)z2
(3)z3
A (z)
FM (z)
FM (z)
,M
X(z) F (z)
Además,sabemos que los coeficientes del filtro
de salida B(z) son inversos a los de A(z) por lo
que
B(z)
GM (z)
GM (z)
,
1 2 3
X (z) G0 (z) 3 (z) 3 (0) 3 (1)z
1
1
z1
3
z2
z3
3 (2)z 3 (3)z
(a)
4 2 4
y, por tanto
3 (0) 3 (3),
3 (2) 3 (1),
3 (1) 3 (2),
3 (3) 3 (0),
Deseamos determinar los correspondientes
parámetros del filtro de celosía {Ki }. Para ello
sabemos que Ki i (i).Dado que el gradodel
polinomio A(z) es tres, tendremos una celosía
de tres etapas, de la cual podremos obtener
inmediatamente el parámetro
Fig.4.12a) Filtroencelosía deM-1 etapasy b)
estructura de cada etapa. K3 3 (3) 1/ 4 .
porlo quedividiendo lasEcuaciones(4.5) a
(4.7) por X(z),tenemos
Para obtener el parámetro K2 necesitaremos el
polinomio A2(z). La relación recursiva general
se determina fácilmente a partir de las
Ecuaciones (4.9) y (4.10), donde:
A0 (z) B0 (z) 1 (4.8)
Am (z) Am1 (z) Km
1
m1(z)
Am (z) Am1 (z) Km
1
m1
(z), Am1 (z) Km Bm (z) Km
Am1(z)
m=1, 2, M– 1 (4.9)
Donde si conocemos Km , Bm y A(z) podemos
Bm (z) Km Am1 (z) z1
B (z), resolver Am1 (z) :
3 3
5. INSTRUMENTOS Y SENSORES
m
m1
m=1,2, M – 1 (4.10)
ComopartimosdeloscoeficientesdelfiltroFIR
para la realización enforma directa,tenemosel
polinomio A(z) que es:
A (z)
Am (z) Km Bm (z)
1 K
2
(4.11)
m1
6. INSTRUMENTOS Y SENSORES
3
1
La cual es precisamente la recursión
descendente usada en el test de estabilidad de
Schür-Cohn.
Mediantela recursión descendiente, conm = 3,
se obtiene:
A (z)
A3 (z) K3 B3 (z)
1
2
z 1
1
z 2
Resolución
Para aplicarla recursióndescendentemediante
la que se obtendrán los coeficientes en celosía,
también denominados coeficientes de reflexión,
el coeficiente am (0) debe definirse como 1 por
conveniencia matemática, luego tomaremos:
H (z) 2.H '(z)
1 K
2
3 3 Con
H '(z) 1
7
z 1
1
z 2
4 2
Por lo que:
K (2) 1/ 3yB (z)
1
2
z 1
z 2
.
2 2 2
3 3
Al repetir la recursión descendente,
obtenemos:
A (z)
A2 (z) K2 B2 (z)
1
1
z 1
1 K
2
2
Así, obtendremos los coeficientes en celosía de
H'(z) y aplicaremosunfactordeganancia 2a la
salida de la estructura resultante.
Otra peculiaridad que debe tenerse en cuenta
es que, en el caso de que K2 (0) hubiera sido 1,
noshubiéramosencontradoconK2=- 1=α2(2).
Ha de tenerse presente que siempre que un
parámetro de celosía es Km 1 una
por lo que finalmente K1 1 (1) 1/ 2 con lo
que los coeficientes de la estructura celosía
indicación de que el polinomio Am-1 (z) tiene
una raíz en la circunferencia de radio unidad.
Así, siempre que se obtiene un parámetro de
resultan celosía Km 1 se rompe la ecuación recursiva
K1 = 1/2, K2 = 1/3, K3 = 1/4.
La estructura en celosía del sistema FIR
propuesto es la representada en la Figura 4.13.
Fig. 4.13 realización en celosía del sistema FIR
propuesto.
y no se podrá seguir la recursividad
descendente.
Enestos casos,dicha raíz puede ser factorizada
y extraída de Am-1 (z), continuando el proceso
iterativo para el sistema de orden reducido.
Siguiendoconelcasoquenosocupa,dadoH'(z)
tenemos que los polinomios A2(z) y B2(z) se
definen como
A (z) 1
7
z 1
1
z 2
2
4 2
EJEMPLO 2:
LIBRO DE SORIA:
4.5. Obtengaloscoeficientesde reflexión
correspondientes al filtro FIRconfunción
de transferencia
H (z) 2
7
z 1
z 2
2
2
2
7. INSTRUMENTOS Y SENSORES
B (z)
1
7
z 1
z 2 2
2 4
Por tanto, K2 =α2(2) = - 1/2. Siguiendo con
la ecuación recursiva descendente tenemos
que
8. INSTRUMENTOS Y SENSORES
2
24 2 2 4
A (z)
A2 (z) K2 B2 (z)
1
1 K2
1
7
z1
1
z2
1
1
7
z1
z2
diferenciándose únicamente en su
interconexión.
Los algoritmos de conversión de
parámetros entre el sistema en forma
directa bm(k) de un sistema FIR y los
1
7
z1
2
1
1
4
parámetros de la estructura en celosía,
ki, se aplican también a la estructura
sólo polos.
y por lo tanto K1=-7/2. La representación final
del diagrama de bloques de H(z) según una
estructura de celosía se representa en la Figura
4.14. Cabe remarcar en esta realización el
factor de ganancia dos de la salida del mismo.
Fig. 4.14 Realización en celosía resultante.
CONCLUSIONES
Las estructuras en celosía tanto FIR
como IIR se caracterizan por los mismos
coeficientes de reflexión, ki,
El sistema sólo polos será estable si sus
polos se encuentran en el interior de la
circunferencia de radio unidad lo cual
implica que |km|< 1 para todo m.
BIBLIOGRAFÍA:
Tratamiento Digital de Señales- Proakis,
Manolakis. pág. (513-520).
Pdf:tema_5_realizacion_de_sistemas_e
n_tiempo_discreto.pdf
Celosía, pdf.
Estructura de filtrospdf.