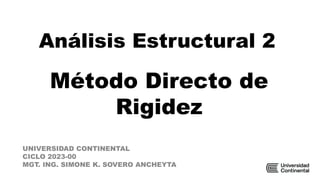
![En el método directo de rigidez, la matriz de rigidez global [K] se
calcula casi de forma directa.
La matriz de rigidez global [K] se va armando barra por barra (en función de su
orientación y de sus grados de libertad)
1 2 3 4 5 6 7 8 9 10
K
9.03 2.37 -2.37 -2.37 -6.66 0.00 0.00 0.00 0.00 0.00
E6
1
2.37 2.37 -2.37 -2.37 0.00 0.00 0.00 0.00 0.00 0.00 2
-2.37 -2.37 9.93 0.45 0.00 0.00 -5.00 0.00 -2.56 1.92 3
-2.37 -2.37 0.45 10.47 0.00 -6.66 0.00 0.00 1.92 -1.44 4
-6.66 0.00 0.00 0.00 14.22 1.92 -2.56 -1.92 -5.00 0.00 5
0.00 0.00 0.00 -6.66 1.92 8.10 -1.92 -1.44 0.00 0.00 6
0.00 0.00 -5.00 0.00 -2.56 -1.92 7.56 1.92 0.00 0.00 7
0.00 0.00 0.00 0.00 -1.92 -1.44 1.92 1.44 0.00 0.00 8
0.00 0.00 -2.56 1.92 -5.00 0.00 0.00 0.00 7.56 -1.92 9
0.00 0.00 1.92 -1.44 0.00 0.00 0.00 0.00 -1.92 1.44 10
𝑘𝑔/𝑐𝑚](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a 05 Analisis Estructural 2_Metodo Directo de Rigidez.pdf
Similar a 05 Analisis Estructural 2_Metodo Directo de Rigidez.pdf (20)
Último
Último (20)
05 Analisis Estructural 2_Metodo Directo de Rigidez.pdf
- 1. Análisis Estructural 2 UNIVERSIDAD CONTINENTAL CICLO 2023-00 MGT. ING. SIMONE K. SOVERO ANCHEYTA Método Directo de Rigidez
- 2. En el método directo de rigidez, la matriz de rigidez global [K] se calcula casi de forma directa. La matriz de rigidez global [K] se va armando barra por barra (en función de su orientación y de sus grados de libertad) 1 2 3 4 5 6 7 8 9 10 K 9.03 2.37 -2.37 -2.37 -6.66 0.00 0.00 0.00 0.00 0.00 E6 1 2.37 2.37 -2.37 -2.37 0.00 0.00 0.00 0.00 0.00 0.00 2 -2.37 -2.37 9.93 0.45 0.00 0.00 -5.00 0.00 -2.56 1.92 3 -2.37 -2.37 0.45 10.47 0.00 -6.66 0.00 0.00 1.92 -1.44 4 -6.66 0.00 0.00 0.00 14.22 1.92 -2.56 -1.92 -5.00 0.00 5 0.00 0.00 0.00 -6.66 1.92 8.10 -1.92 -1.44 0.00 0.00 6 0.00 0.00 -5.00 0.00 -2.56 -1.92 7.56 1.92 0.00 0.00 7 0.00 0.00 0.00 0.00 -1.92 -1.44 1.92 1.44 0.00 0.00 8 0.00 0.00 -2.56 1.92 -5.00 0.00 0.00 0.00 7.56 -1.92 9 0.00 0.00 1.92 -1.44 0.00 0.00 0.00 0.00 -1.92 1.44 10 𝑘𝑔/𝑐𝑚
- 3. El procedimiento empieza por identificar, de forma matricial los componentes de una estructura. • Definir un sistema de ejes globales para la estructura. Las coordenadas de los nudos se refieren a dicho sistema. • Conectividad de los elementos, identificando para cada barra el nudo inicial y el final. Cada barra está asociada a un sistema de ejes locales al cual se refieren todas las dimensiones y características de la barra. El SCL queda definido automáticamente por la orientación establecida para cada barra. • El eje “x” local coincide con el eje longitudinal geométrico de la barra, siendo el sentido positivo el que va del nudo inicial (nudo de menor numeración) al final (nudo de mayor numeración). Los otros ejes locales deberán coincidir con los ejes principales de Inercia de la sección transversal de la barra formando un triedro directo.
- 4. P1 P2 L H Para organizar la geometría de la estructura es necesario posicionar el sistema coordenado de referencia Adicionalmente, se deberá identificar el tipo de estructura y los grados de libertad de cada nudo 1 𝐸1, 𝐼1, 𝐴1 𝐸2, 𝐼2, 𝐴2 𝐸3, 𝐼3, 𝐴3 Es importante darle una orientación a cada barra: punto de inicio “i” y punto final “j” Coordenadas: Nudos Barras (conectividad) Barra ix iy jx jy 1 0 0 0 H 2 0 H L H 3 L 0 L H X Y 1 0 0 2 0 H 3 L H 4 L 0 X Y 2 3 𝐸1 𝐼1 𝐴1 𝐸2 𝐼2 𝐴2 𝐸3 𝐼3 𝐴3 1 2 3 4 nb: número de barras nn: número de nudos 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥
- 5. El procedimiento empieza por identificar, de forma matricial los componentes de una estructura. • Propiedades de la sección transversal de cada barra. Dependiendo del tipo de estructura (reticulado, pórtico plano, pórtico espacial, emparrillado) se debe dar el área de la sección transversal, los momentos de inercia en relación a los ejes principales y la inercia a la torsión. • Propiedades del material. Se debe indicar, para cada barra, el módulo de elasticidad longitudinal y/o el módulo de elasticidad transversal. • Especificación de los vínculos: se debe indicar el nombre del nudo que tiene una o más restricciones y cuales son las mismas. • Descripción de la carga: se da el nombre del nudo y los componentes globales de las cargas externas y las fuerzas de empotramiento perfecto en relación a los ejes locales de la barra, si hay cargas en el tramo. Isotrópico: mismas propiedades mecánicas en todas las direcciones. Ortotrópico: diferentes propiedades mecánicas en las direcciones ortogonales Anisotrópico: diferentes propiedades mecánicas todas las direcciones
- 6. Seguidamente se identifican los grados de libertad asociados a cada nudo y que dependen del tipo de estructura. P1 P2 L H 1 Y 2 3 1 2 3 4 1 2 3 4 5 6 7 8 9 10 11 12 Grados de libertad: Nudo gdl 1 1 2 3 2 4 5 6 3 7 8 9 4 10 11 12 Grados de libertad libres: Grados de libertad restringidos: 4 5 6 7 8 9 12 1 2 3 10 11
- 7. Luego, se plantea la matriz de rigidez de cada barra, ya sea en el sistema coordenado local o sistema coordenado global. P1 P2 L H 1 Y 2 3 1 2 3 4 1 2 3 4 5 6 7 8 9 10 11 12 [k1]= [k2]= [k3]= Están en el SCL 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 𝑦 𝑧 𝑥 Matriz de rigidez de barra 𝑘11 𝑘12 𝑘13 𝑘21 𝑘41
- 8. Es importante entender que para ensamblar la matriz de rigidez global es necesario transformar las [k] al SCG. [k1]= Matriz de rotación SCG SCL [K1] [r1] 𝐾1 = 𝑟1 𝑡 𝑘1 𝑟1 𝐾2 = 𝑟2 𝑡 𝑘2 𝑟2 𝐾3 = 𝑟3 𝑡 𝑘3 𝑟3 *Rotación de matrices o rotación de coordenadas
- 9. Una vez se tengan todas las matrices de barra expresadas en el SCG se procede a ensamblar la matriz de rigidez global [K]. [K1]= 1 2 3 4 5 6 1 2 3 4 5 6 [KT]= 1 2 3 4 5 6 7 8 9 10 11 12 1 2 3 4 5 6 7 8 9 10 11 12 [K2]= 4 5 6 7 8 9 4 5 6 7 8 9 [K3]= 10 11 12 7 8 9 10 11 12 7 8 9 ngdl x ngdl
- 10. Después, se ordena la matriz [K] en función de los gdll y los gdlr [KT]= 4 5 6 7 8 9 1 2 3 10 11 12 4 5 6 7 8 9 1 2 3 10 11 12 𝑄 = 𝐾 𝐷 KLL KLR KRL KRR KLL KLR KRL KRR QL QR DL 0 = 𝑄𝐿 = 𝐾𝐿𝐿 𝐷𝐿 ………..(1) 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 ………...(2) 𝐷𝑒 𝑙𝑎 𝑒𝑐𝑢𝑎𝑐𝑖ó𝑛 1: 𝐷𝐿 = 𝐾𝐿𝐿 −1 𝑄𝐿 … … … … (3) 𝑅𝑒𝑒𝑚𝑝𝑙𝑎𝑧𝑎𝑛𝑑𝑜 3 𝑒𝑛 (2) 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 DR=0
- 11. Una vez resueltas los desplazamientos DL y las reacciones QR se procede a calcular las fuerzas internas en la barra rij Di rij Dj dij = 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 Identificar los desplazamientos en los nudos de cada barra D1 Di D1 D2 D3 Dj D4 D5 D6 Barra 1 SCG SCL 𝑦 𝑧 𝑥 D1 Di 0 0 0 Dj D4 D5 D6
- 12. Método Directo de Rigidez en Armaduras
- 13. Para realizar el análisis de armaduras se hacen ciertas suposiciones, que no siempre se dan en las estructuras reales. 1. Uniones entre barras perfectamente articuladas (no existe fricción). 2. Cargas actúan solo sobre los nudos. 3. Peso propio de las barras se desestima, o se transmite hacia los nudos 4. Eje centroidal de las barras es recto. 1 2 3 4 5
- 14. Debido a esas suposiciones, al hacer un corte en cualquiera de las barras solo se encuentran fuerzas axiales (tracción o compresión). qED qEB qAD qED qEB qAD RAy RAx RCy En cada barra solo existen deformaciones axiales (alargamiento o acortamiento)
- 15. La rigidez se define como la fuerza necesaria en un punto para que se genere un desplazamiento unitario en algún otro punto 1 2 3 1 2 3 𝑃11 ∆1= 1 𝑘𝑖𝑗 𝑘11 𝑘21 𝑘31 Suponemos que cada punto tiene solo 1 gdl 𝑃21 𝑃31 𝑘11 𝑘21 𝑘31 ∆2= 0 ∆3= 0
- 16. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑖 𝑗 𝑥 𝑦 𝜃 1 2 [kij] = k11 k12 k21 k22 2 ∗ 2 k11: la fuerza necesaria en el gdl 1, para producir un desplazamiento unitario en el gdl 1 k21: la fuerza necesaria en el gdl 2, para producir un desplazamiento unitario en el gdl 1 k12: la fuerza necesaria en el gdl 1, para producir un desplazamiento unitario en el gdl 2 k22: la fuerza necesaria en el gdl 2, para producir un desplazamiento unitario en el gdl 2 𝑑1 = 1 𝑑2 = 1
- 17. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 𝑖 𝑗 𝑥 𝑦 𝜃 1 2 [kij] = k11 k21 2 ∗ 2 𝑑1 = 1 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎 𝑑𝑒 𝑘𝑖𝑗 : 𝑑1 = 1; 𝑑2 = 0 𝑑2 = 0 𝑑1 = 1 𝑞11
- 18. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 1 2 𝑋 𝑌 𝐸, 𝐴 𝐿 𝑖 𝑗 𝑒 𝑗𝑥 𝑗Y 𝑗′ 𝑗′𝑥 𝑗′𝑌 (𝑗′𝑋, 𝑗′𝑌) 𝐸, 𝐴 𝐿 𝑥 𝑦 𝑖 𝑗 𝑗′ 𝑒 𝑗𝑥 𝑗′𝑥 𝐸, 𝐴 𝐿 𝑥 𝑦 𝑖 𝑗 𝑒 𝑋 𝑌 𝐸, 𝐴 𝐿 𝑖 𝑗 𝑗𝑥 𝑗y 1 2 3 4 ∆𝑗𝑋 ∆𝑗𝑌 𝑆𝐶𝐿 𝑆𝐶𝐺
- 19. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘𝑖𝑗 = 𝐸𝐴/𝐿 𝑘12 𝑘21 𝑘22 𝑑1 = 1 𝑑2 = 1 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝑑1 = 1 𝑑1 = 1 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑜𝑠 𝑒𝑙 𝑔𝑑𝑙 1, 𝑦 𝑑𝑒𝑗𝑎𝑚𝑜𝑠 𝑓𝑖𝑗𝑜 𝑒𝑙 𝑔𝑑𝑙 2 𝑞11 𝑑 = 𝑞𝐿 𝐸𝐴 Ley de Hooke: 𝑞11 = 𝑑1 𝐸𝐴 𝐿 𝑞11 = 𝐸𝐴 𝐿 ∗ 1 𝑘11 𝑞11 = 𝐸𝐴 𝐿
- 20. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘𝑖𝑗 = 𝐸𝐴/𝐿 𝑘12 −𝐸𝐴/𝐿 𝑘22 𝑑1 = 1 𝑑2 = 1 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝑑1 = 1 𝑑1 = 1 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑜𝑠 𝑒𝑙 𝑔𝑑𝑙 1, 𝑦 𝑑𝑒𝑗𝑎𝑚𝑜𝑠 𝑓𝑖𝑗𝑜 𝑒𝑙 𝑔𝑑𝑙 2 𝑞21 𝑑 = 𝑞𝐿 𝐸𝐴 Ley de Hooke: 𝑞21 = −𝑑1 𝐸𝐴 𝐿 𝑞21 = − 𝐸𝐴 𝐿 ∗ 1 𝑘21 𝑞21 = − 𝐸𝐴 𝐿
- 21. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘𝑖𝑗 = 𝐸𝐴/𝐿 −𝐸𝐴/𝐿 −𝐸𝐴/𝐿 𝑘22 𝑑1 = 1 𝑑2 = 1 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑠𝑒𝑔𝑢𝑛𝑑𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝑑2 = 1 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑜𝑠 𝑒𝑙 𝑔𝑑𝑙 2, 𝑦 𝑑𝑒𝑗𝑎𝑚𝑜𝑠 𝑓𝑖𝑗𝑜 𝑒𝑙 𝑔𝑑𝑙 1 𝑑 = 𝑞𝐿 𝐸𝐴 Ley de Hooke: 𝑞12 = −𝑑2 𝐸𝐴 𝐿 𝑞12 = − 𝐸𝐴 𝐿 ∗ 1 𝑘12 𝑞12 = − 𝐸𝐴 𝐿 𝑑2 = 1 𝑞12
- 22. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘𝑖𝑗 = 𝐸𝐴/𝐿 −𝐸𝐴/𝐿 −𝐸𝐴/𝐿 𝐸𝐴/𝐿 𝑑1 = 1 𝑑2 = 1 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑠𝑒𝑔𝑢𝑛𝑑𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝑑2 = 1 𝐷𝑒𝑠𝑝𝑙𝑎𝑧𝑎𝑚𝑜𝑠 𝑒𝑙 𝑔𝑑𝑙 2, 𝑦 𝑑𝑒𝑗𝑎𝑚𝑜𝑠 𝑓𝑖𝑗𝑜 𝑒𝑙 𝑔𝑑𝑙 1 𝑑 = 𝑞𝐿 𝐸𝐴 Ley de Hooke: 𝑞22 = 𝑑2 𝐸𝐴 𝐿 𝑞22 = 𝐸𝐴 𝐿 ∗ 1 𝑘22 𝑞22 = 𝐸𝐴 𝐿 𝑑2 = 1 𝑞22
- 23. La matriz de rigidez de barra de una armadura en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘𝑖𝑗 = 𝐸𝐴/𝐿 −𝐸𝐴/𝐿 −𝐸𝐴/𝐿 𝐸𝐴/𝐿 𝑑1 = 1 𝑑2 = 1 𝑘𝑖𝑗 = 1 −1 ∗ 𝐸𝐴/𝐿 −1 1
- 24. La matriz de rigidez de barra en el SCL está en función de sus grados de libertad en el SCL 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑘1 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑘2 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 𝑘3 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 𝑘4 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿
- 25. Para calcular la matriz de rotación [r] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 𝑟𝑖𝑗 𝑟11 𝑟12 𝑟13 𝑟14 𝑟21 𝑟22 𝑟23 𝑟24
- 26. Para calcular la matriz de rotación [R] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 0 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 La matriz de rotación se plantea dando un desplazamiento unitario en el sistema nuevo y ver que sucede en el sistema antiguo 𝜃 𝐷𝑋 = 1 𝑐𝑜𝑠𝜃 = 𝑑1 𝐷𝑥 𝑑1 = 𝑐𝑜𝑠𝜃 ∗ 𝐷𝑥 𝑑1 = 𝑐𝑜𝑠𝜃 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝑑1
- 27. Para calcular la matriz de rotación [R] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 La matriz de rotación se plantea dando un desplazamiento unitario en el sistema nuevo y ver que sucede en el sistema antiguo 𝜃 𝐷𝑌 = 1 𝑠𝑒𝑛𝜃 = 𝑑1 𝐷𝑌 𝑑1 = 𝑠𝑒𝑛𝜃 ∗ 𝐷𝑌 𝑑1 = 𝑠𝑒𝑛𝜃 𝜃 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑠𝑒𝑔𝑢𝑛𝑑𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎:
- 28. Para calcular la matriz de rotación [R] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 La matriz de rotación se plantea dando un desplazamiento unitario en el sistema nuevo y ver que sucede en el sistema antiguo
- 29. Para calcular la matriz de rotación [R] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 𝑐𝑜𝑠𝜃 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 La matriz de rotación se plantea dando un desplazamiento unitario en el sistema nuevo y ver que sucede en el sistema antiguo 𝐷𝑋 = 1 𝜃 𝑐𝑜𝑠𝜃 = 𝑑2 1 𝑑2 = 𝑐𝑜𝑠𝜃
- 30. Para calcular la matriz de rotación [R] se da un desplazamiento unitario en c/u de los gdl del SCG y se observa que pasa en el SCL SCG: sistema nuevo SCL: sistema antiguo 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝑥 𝑦 𝑖 𝑗 1 2 𝜃 𝑋 𝑌 La matriz de rotación se plantea dando un desplazamiento unitario en el sistema nuevo y ver que sucede en el sistema antiguo 𝐷𝑌 = 1 𝑑2 =? 𝜃 𝑠𝑒𝑛𝜃 = 𝑑2 1 𝑑2 = 𝑠𝑒𝑛𝜃
- 31. Para convertir la matriz de barra [k1] del SCL al SCG 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 0 𝑠𝑒𝑛𝜃 0 0 𝑐𝑜𝑠𝜃 0 𝑠𝑒𝑛𝜃 2 x 4 2 x 2 4 x 2 𝐾𝑖𝑗 = 𝐸𝐴 𝐿 ∗ 𝑐𝑜𝑠2𝜃 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 −𝑐𝑜𝑠2𝜃 −𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 𝑠𝑒𝑛2𝜃 −𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 −𝑠𝑒𝑛2𝜃 −𝑐𝑜𝑠2𝜃 −𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠2𝜃 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 −𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛 𝜃 𝑠𝑒𝑛2𝜃 4 x 4 𝑆𝐶𝐿 𝑆𝐶𝐺
- 32. Ejemplo 1: Resolver la siguiente armadura: 3 𝑚 3 𝑚 30 𝑡 15 𝑡 30 𝑡 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1200 𝑚𝑚2 𝑁𝑜 𝑒𝑥𝑖𝑠𝑡𝑒 𝑛𝑢𝑑𝑜
- 33. Ejemplo 1: Resolver la siguiente armadura: 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1200 𝑚𝑚2 3 𝑚 3 𝑚 1 1 30 𝑡 15 𝑡 30 𝑡 2 3 4 2 3 1 2 3 4 5 6 7 8 𝑋 𝑌 1. Definir matricialmente la estructura: nudos, barras, gdl, SC, orientación
- 34. Ejemplo 1: Resolver la siguiente armadura: 3 𝑚 3 𝑚 1 1 30 𝑡 15 𝑡 30 𝑡 2 3 4 2 3 1 2 3 4 5 6 7 8 𝑋 𝑌 2. Plantear la matriz de rigidez [kij] de cada barra 𝑘𝑖𝑗 = 1 −1 ∗ 𝐸𝐴/𝐿 −1 1 𝐸 = 200 𝐺𝑃𝑎 = 2 ∗ 106 𝑘𝑔/𝑐𝑚2 𝐴 = 1200 𝑚𝑚2 = 12 𝑐𝑚2 𝐵𝑎𝑟𝑟𝑎 1 = 𝐵𝑎𝑟𝑟𝑎 2 = 𝐵𝑎𝑟𝑟𝑎 3: 𝑘1 = 𝑘2 = 𝑘3 = 1 −1 8 ∗ 104 −1 1 𝑘𝑔/𝑐𝑚 𝐵𝑎𝑟𝑟𝑎 4 = 𝐵𝑎𝑟𝑟𝑎 5 𝑘4 = [𝑘5] 1 −1 5.6 ∗ 104 −1 1 𝑘𝑔/𝑐𝑚
- 35. Ejemplo 1: Resolver la siguiente armadura: 3 𝑚 3 𝑚 1 1 30 𝑡 15 𝑡 30 𝑡 2 3 4 2 3 1 2 3 4 5 6 7 8 𝑋 𝑌 3. Cálculo de la matriz de rotación para cada barra rij 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝐵𝑎𝑟𝑟𝑎 1 = 𝐵𝑎𝑟𝑟𝑎 3: 𝜃 = 0° 𝑥 𝑦 𝑟1 1 0 0 0 0 0 1 0
- 36. Ejemplo 1: Resolver la siguiente armadura: 3 𝑚 3 𝑚 1 1 30 𝑡 15 𝑡 30 𝑡 2 3 4 2 3 1 2 3 4 5 6 7 8 𝑋 𝑌 3. Cálculo de la matriz de rotación para cada barra rij 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝑟2 0 1 0 0 0 0 0 1 𝑟4 0.71 0.71 0 0 0 0 0.71 0.71 𝑟5 0.71 −0.71 0 0 0 0 0.71 −0.71 𝜃 = 90° 𝜃 = 45° 𝜃 = 315°
- 37. Ejemplo 1: Resolver la siguiente armadura: 4. Rotación de matrices de barra Barra 1 8 ∗ 104 1 −1 −1 1 1 0 0 0 0 0 1 0 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 1 0 0 0 0 1 0 0 𝐾1 = 8 ∗ 104 3 4 1 2 1 0 -1 0 3 0 0 0 0 4 -1 0 1 0 1 0 0 0 0 2 Barra 2 8 ∗ 104 1 −1 −1 1 0 1 0 0 0 0 0 1 0 0 1 0 0 0 0 1 𝐾2 = 8 ∗ 104 3 4 5 6 0 0 0 0 3 0 1 0 -1 4 0 0 0 0 5 0 -1 0 1 6
- 38. Ejemplo 1: Resolver la siguiente armadura: 4. Rotación de matrices Barra 3 8 ∗ 104 1 −1 −1 1 1 0 0 0 0 0 1 0 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 1 0 0 0 0 1 0 0 𝐾3 = 8 ∗ 104 5 6 7 8 1 0 -1 0 5 0 0 0 0 6 -1 0 1 0 7 0 0 0 0 8 Barra 4 5.65 ∗ 104 1 −1 −1 1 0.71 0.71 0 0 0 0 0.71 0.71 0.71 0 0.71 0 0 0.71 0 0.71 𝐾4 = 5.65 ∗ 104 3 4 7 8 0.504 0.504 -0.504 -0.504 0.504 0.504 -0.504 -0.504 -0.504 -0.504 0.504 0.504 -0.504 -0.504 0.504 0.504
- 39. Ejemplo 1: Resolver la siguiente armadura: 4. Rotación de matrices 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 Barra 5 5.65 ∗ 104 1 −1 −1 1 0.71 -0.71 0 0 0 0 0.71 -0.71 0.71 0 −0.71 0 0 0.71 0 −0.71 𝐾5 = 5.65 ∗ 104 5 6 1 2 0.504 -0.504 -0.504 0.504 5 -0.504 0.504 0.504 -0.504 6 -0.504 0.504 0.504 -0.504 1 0.504 -0.504 -0.504 0.504 2
- 40. Ejemplo 1: Resolver la siguiente armadura: 5. Ensamblar la matriz de rigidez global [K]= 1 2 3 4 5 6 7 8 ∗ 104 10.85 1 2 2.85 3 4 -8.00 5 6 7 8
- 41. Ejemplo 1: Resolver la siguiente armadura: 5. Ensamblar la matriz de rigidez global K 1 2 3 4 5 6 7 8 10.85 -2.85 -8.00 0 -2.85 2.85 0 0 ∗ 104 1 -2.85 2.85 0 0 2.85 -2.85 0 0 2 -8.00 0 10.85 2.85 0 0 -2.85 -2.85 3 0 0 2.85 10.85 0 -8.00 -2.85 -2.85 4 -2.85 2.85 0 0 10.85 -2.85 -8.00 0 5 2.85 -2.85 0 -8.00 -2.85 10.85 0 0 6 0 0 -2.85 -2.85 -8.00 0 10.85 2.85 7 0 0 -2.85 -2.85 0 0 2.85 2.85 8 𝑘𝑔/𝑐𝑚
- 42. Ejemplo 1: Resolver la siguiente armadura: 6. Ordenar la matriz de rigidez global 𝑘𝑔/𝑐𝑚 𝑔𝑑𝑙𝑙: 3,4,5,6 𝑔𝑑𝑙𝑟: 1, 2,7,8 K = 3 4 5 6 1 2 7 8 10.85 2.85 0.00 0.00 -8.00 0.00 -2.85 -2.85 3 2.85 10.85 0.00 -8.00 0.00 0.00 -2.85 -2.85 4 0.00 0.00 10.85 -2.85 -2.85 2.85 -8.00 0.00 5 0.00 -8.00 -2.85 10.85 2.85 -2.85 0.00 0.00 6 -8.00 0.00 -2.85 2.85 10.85 -2.85 0.00 0.00 1 0.00 0.00 2.85 -2.85 -2.85 2.85 0.00 0.00 2 -2.85 -2.85 -8.00 0.00 0.00 0.00 10.85 2.85 7 -2.85 -2.85 0.00 0.00 0.00 0.00 2.85 2.85 8
- 43. Ejemplo 1: Resolver la siguiente armadura: 6. Ordenar la matriz de rigidez global 𝑘𝑔/𝑐𝑚 𝑔𝑑𝑙𝑙: 3,4,5,6 𝑔𝑑𝑙𝑟: 1, 2,7,8 KRL = 3 4 5 6 -8.00 0.00 -2.85 2.85 1 0.00 0.00 2.85 -2.85 2 -2.85 -2.85 -8.00 0.00 7 -2.85 -2.85 0.00 0.00 8 KLL = 3 4 5 6 10.85 2.85 0.00 0.00 3 2.85 10.85 0.00 -8.00 4 0.00 0.00 10.85 -2.85 5 0.00 -8.00 -2.85 10.85 6 𝑘𝑔/𝑐𝑚 3 30 ∗ 103 4 0 5 15 6 -30 1 R1x 2 R1y 7 R4x 8 R4y QL QR 𝐷𝐿 = 𝐾𝐿𝐿 −1 𝑄𝐿 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚 QR -60.00 ∗ 103 1 21.97 2 15.00 7 8.03 8 𝑘𝑔 𝑘𝑔
- 44. Ejemplo 1: Resolver la siguiente armadura: 7. Verificando el equilibrio externo: QR -60.00 ∗ 103 1 21.97 2 15.00 7 8.03 8 𝑘𝑔 𝑅4𝑥 = 15 𝑡 𝑅4𝑦 = 8.03 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97t 𝐹𝑥 = 0 → 15 + 30 − 60 𝑡 + 15 𝑡 = 0 → 𝐻𝑎𝑦 𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜 𝐹𝑦 = 0 → −30 + 8.03 + 21.97 = 0 → 𝐻𝑎𝑦 𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑜
- 45. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver fuerzas internas en las barras: 𝑅4𝑥 = 15 𝑡 𝑅4𝑦 = 8.03 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97t 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑏𝑎𝑟𝑟𝑎 1: 𝐷1 = 𝑟1 = 1 0 0 0 0 0 1 0 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚 𝐷𝑖 0.48 3 -0.76 4 𝐷j 0 1 0 2 rij Di rij Dj dij = SCG SCL 𝑑𝑖𝑗 = 0.48 −0.76 0 0 1 0 0 0 0 0 1 0 2 x 4 4 x 1 0.48 0 𝑐𝑚
- 46. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver fuerzas internas en las barras: 𝑅4𝑥 = 15 𝑡 𝑅4𝑦 = 8.03 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97t 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚 𝑑𝑖 0.48 𝑑𝑗 0 𝑐𝑚 𝑖 𝑗 𝑖′ 0.48 𝑐𝑚 𝑞1 = 8 ∗ 104 1 −1 −1 1 0.48 0 2 x 2 2 x 1 38034.6 -38034.6 2 x 1 𝑘𝑔 𝑖 𝑗 1′ 2′ 38.03𝑡 38.03𝑡 𝐶𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑏𝑎𝑟𝑟𝑎 1:
- 47. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver fuerzas internas en las barras: 𝑅4𝑥 = 15 𝑡 𝑅4𝑦 = 8.03 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97t 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑏𝑎𝑟𝑟𝑎 2: 𝐷2 = 𝑟2 = 0 1 0 0 0 0 0 1 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚 𝐷𝑖 0.48 3 -0.76 4 𝐷j -0.09 5 -0.86 6 𝑑𝑖𝑗 = 0.48 -0.76 -0.09 -0.86 0 1 0 0 0 0 0 1 2 x 4 4 x 1 -0.76 -0.86 𝑐𝑚
- 48. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver fuerzas internas en las barras: 𝑅4𝑥 = 15 𝑡 𝑅4𝑦 = 8.03 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97t 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚 𝑑𝑖 -0.76 𝑑𝑗 -0.86 𝑐𝑚 𝑞2 = 8 ∗ 104 1 −1 −1 1 -0.76 -0.86 2 x 2 2 x 1 8034.64 -8034.64 2 x 1 𝑘𝑔 𝑖 𝑗 1′ 2′ 8.03𝑡 8.03𝑡 𝐶𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑏𝑎𝑟𝑟𝑎 2: 𝐶𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛
- 49. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver las fuerzas internas de barra Db3 Di -0.087067 5 -0.857782 6 Dj 0 7 0 8 Barra 3 𝑐𝑚 dij = 𝑟3 1 0 0 0 0 0 1 0 -0.087067 -0.857782 0 0 1 0 0 0 0 0 1 0 dij 2 x 4 4 x 1 -0.087067 1’ 0 2’ = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘3 = 8 ∗ 104 1 −1 −1 1 𝑞3 8 ∗ 104 1 −1 −1 1 -0.087 0 = = -6965.36 1’ 6965.36 2’ 𝑘𝑔 −6.97𝑡 6.97𝑡 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛 1′ 2′
- 50. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver las fuerzas internas de barra Db4 Di 0.475434 3 -0.757349 4 Dj 0 7 0 8 Barra 4 𝑐𝑚 dij = 𝑟4 0.71 0.71 0 0 0 0 0.71 0.71 0.475434 -0.757349 0 0 0.71 0.71 0 0 0 0 0.71 0.71 dij 2 x 4 4 x 1 -0.20016 1’ 0 2’ = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘4 = 5.65 ∗ 104 1 −1 −1 1 𝑞4 5.65 ∗ 104 1 −1 −1 1 -0.20016 0 = = -11309.04 1’ 11309.04 2’ 𝑘𝑔 11.31𝑡 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛 11.31𝑡
- 51. Ejemplo 1: Resolver la siguiente armadura: 8. Resolver las fuerzas internas de barra Db5 Di -0.087067 5 -0.857782 6 Dj 0 1 0 2 Barra 5 𝑐𝑚 dij = 𝑟5 0.71 -0.71 0 0 0 0 0.71 -0.71 -0.087067 -0.857782 0 0 0.71 -0.71 0 0 0 0 0.71 -0.71 dij 2 x 4 4 x 1 0.54720765 1’ 0 2’ = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘5 = 5.65 ∗ 104 1 −1 −1 1 𝑞5 5.65 ∗ 104 1 −1 −1 1 0.547207 0 = = 30917.23 1’ -30917.23 2’ 𝑘𝑔 30.92𝑡 𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛 11.31𝑡 30.92𝑡
- 52. Ejemplo 1: Resolver la siguiente armadura: 9. Resultados finales 3 𝑚 3 𝑚 1 1 30 𝑡 15 𝑡 30 𝑡 2 3 4 2 3 1 2 3 4 5 6 7 8 𝑋 𝑌 𝑅4𝑥 = 15 t 𝑅4𝑦 = 8.03 𝑡 QR -60.00 1 21.97 2 15.00 7 8.03 8 𝑡 𝑅1𝑥 = −60 t 𝑅1𝑦 = 21.97 𝑡 −38.03 𝑡 −8.034 𝑡 6.97 𝑡 DL 0.475433 3 -0.757349 4 -0.087067 5 -0.857782 6 𝑐𝑚
- 53. Ejemplo 1: Resolver la siguiente armadura: 10. Revisando a través de un DCL en el nudo 1 𝑅1𝑦 = 21.97 𝑡 𝑅1𝑥 = −60 𝑡 𝑞1 = −38.03 𝑞5 = −30.92 𝐹𝑦 = 0: 𝑞5 𝑠𝑒𝑛 45 + 21.97 = 0 −𝑞1 − 𝑞5 cos 45 − 60 = 0 𝐹𝑥 = 0: 𝑞5 = −21.97 2 𝑞1 = − −21.97 − 60 𝑞1 = −38.03 𝑡
- 54. Ejemplo 1: Resolver la siguiente armadura: 9. Revisando a través de un DCL en el nudo 3 15 𝑡 30 𝑡 𝑞2 = −8.034 𝑡 𝑞3 = 6.97 𝑡 𝐹𝑦 = 0: −30 − −8.034 − −30.92 ∗ 𝑠𝑒𝑛 45° = 0 6.97 + 15 + (−30.92 ∗ 𝑐𝑜𝑠45°) = 0 𝐹𝑥 = 0: 𝑞5 = −30.92 𝑡 6.97 + 15 + (−30.92 ∗ 0.71) = 0 6.97 + 15 − 21.95 = 0 0 = 0 −30 − −8.034 − −21.95 = 0 −30 + 8.034 + 21.95 = 0 0 = 0
- 55. Ejemplo 2: Resolver la siguiente armadura: 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1500 𝑚𝑚2
- 56. Ejemplo 2: Resolver la siguiente armadura: 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1500 𝑚𝑚2 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝑘𝑖𝑗 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝐷𝐿 = 𝐾𝐿𝐿 −1 𝑄𝐿 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑑𝑖𝑗 = 𝑟𝑖𝑗 𝐷𝑖𝑗
- 57. Ejemplo 2: Resolver la siguiente armadura: 𝐸 = 200 𝐺𝑃𝑎 = 2 ∗ 106𝑘𝑔/𝑐𝑚2 𝐴 = 1500 𝑚𝑚2 = 15 𝑐𝑚2 𝑘𝑖𝑗 = 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 − 𝐸𝐴 𝐿 𝐸𝐴 𝐿 1. 𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑏𝑎𝑟𝑟𝑎 𝑒𝑛 𝑒𝑙 𝑆𝐶𝐿 𝑘1 = 7.07 −7.07 𝐸6 −7.07 7.07 𝑘2 = 𝑘7 = 7.5 −7.5 𝐸6 −7.5 7.5 𝑘3 = 10 −10 𝐸6 −10 10 𝑘4 = 10 −10 𝐸6 −10 10 𝑘5 = 𝑘6 = 6.0 −6.0 𝐸6 −6.0 6.0
- 58. Ejemplo 2: Resolver la siguiente armadura: 2. 𝑀𝑎𝑡𝑟𝑖𝑧 𝑑𝑒 𝑟𝑜𝑡𝑎𝑐𝑖ó𝑛 𝑑𝑒 𝑐𝑎𝑑𝑎 𝑏𝑎𝑟𝑟𝑎 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 [𝑟1] = 0.71 0.71 0 0 0 0 0.71 0.71 𝜃1 = 45° [𝑟4] = 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝜃4 = 90° [𝑟2] = [𝑟7] = [𝑟3] = 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝜃2 = 𝜃3 = 𝜃7 = 0° [𝑟5] = 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝜃5 = 53° [𝑟6] = 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝜃6 = 323°
- 59. Ejemplo 2: Resolver la siguiente armadura: 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1500 𝑚𝑚2 𝑘𝑖𝑗 = 𝐸𝐴 𝐿 1 −1 −1 1 𝑘1 = 7.075 ∗ 104 1 −1 −1 1 𝑘2 = 7.5 ∗ 104 1 −1 −1 1 𝑘3 = 10 ∗ 104 1 −1 −1 1 = 𝑘7 = 𝑘4 𝑘5 = 6 ∗ 104 1 −1 −1 1 = 𝑘6 1. Plantear la matriz de rigidez [kij] de cada barra (SCL) 𝑘𝑔/𝑐𝑚
- 60. Ejemplo 2: Resolver la siguiente armadura: 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐸 = 200 𝐺𝑃𝑎 𝐴 = 1500 𝑚𝑚2 2. Plantear la matriz de rotación [rij] de cada barra 𝑟𝑖𝑗 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 𝑟6 0.80 0.60 0 0 0 0 0.80 0.60 𝑟2 = 𝑟3 = 𝑟7 1 0 0 0 0 0 1 0 𝑟1 0.71 0.71 0 0 0 0 0.71 0.71 𝑟4 0 1 0 0 0 0 0 1 𝑟5 0.80 −0.60 0 0 0 0 0.80 −0.60
- 61. Ejemplo 2: Resolver la siguiente armadura: 3. Rotar las matrices de barra [kij] del SCL al SCG 𝑟1= 0.71 0.71 0 0 0 0 0.71 0.71 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝑘1 = 7.075 ∗ 104 1 −1 −1 1 𝑟1𝑡 = 0.71 0 0.71 0 0 0.71 0 0.71 1 2 3 4 𝐾1 = 3.56 3.56 -3.56 -3.56 ∗ 104 1 3.56 3.56 -3.56 -3.56 2 -3.56 -3.56 3.56 3.56 3 -3.56 -3.56 3.56 3.56 4 𝑟2 = 1 0 0 0 0 0 1 0 𝑘2 = 7.5 ∗ 104 1 −1 −1 1 𝑟2𝑡 = 1 0 0 0 0 1 0 0 3 4 7 8 𝐾2 = 7.5 0 -7.5 0 ∗ 104 3 0 0 0 0 4 -7.5 0 7.5 0 7 0 0 0 0 8 𝑟3 = 1 0 0 0 0 0 1 0 𝑘3 = 10 ∗ 104 1 −1 −1 1 𝑟3𝑡 = 1 0 0 0 0 1 0 0 1 2 5 6 𝐾3 = 10 0 -10 0 ∗ 104 1 0 0 0 0 2 -10 0 10 0 5 0 0 0 0 6
- 62. Ejemplo 2: Resolver la siguiente armadura: 3. Rotar las matrices de barra [kij] del SCL al SCG 𝑟4= 0 1 0 0 0 0 0 1 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝑘4 = 10 ∗ 104 1 −1 −1 1 𝑟4𝑡 = 0 0 1 0 0 0 0 1 5 6 3 4 𝐾4 = 0 0 0 0 ∗ 104 5 0 10 0 -10 6 0 0 0 0 3 0 -10 0 10 4 𝑟5 = 0.80 −0.60 0 0 0 0 0.80 −0.60 𝑘5 = 6 ∗ 104 1 −1 −1 1 𝑟5𝑡 = 0.80 0 −0.60 0 0 0.80 0 −0.60 3 4 9 10 𝐾5 = 3.84 -2.88 -3.84 2.88 ∗ 104 3 -2.88 2.16 2.88 -2.16 4 -3.84 2.88 3.84 -2.88 9 2.88 -2.16 -2.88 2.16 10 𝑟6 = 0.80 0.60 0 0 0 0 0.80 −0.60 𝑘6 = 6 ∗ 104 1 −1 −1 1 𝑟6𝑡 = 0.80 0 0.60 0 0 0.80 0 0.60 5 6 7 8 𝐾6 = 3.84 2.88 -3.84 -2.88 ∗ 104 5 2.88 2.16 -2.88 -2.16 6 -3.84 -2.88 3.84 2.88 7 -2.88 -2.16 2.88 2.16 8
- 63. Ejemplo 2: Resolver la siguiente armadura: 3. Rotar las matrices de barra [kij] del SCL al SCG 𝑟7= 1 0 0 0 0 0 1 0 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝑘7 = 7.5 ∗ 104 1 −1 −1 1 𝑟7𝑡 = 1 0 0 0 0 1 0 0 5 6 9 10 𝐾7 = 7.5 0 -7.5 0 ∗ 104 5 0 0 0 0 6 -7.5 0 7.5 0 9 0 0 0 0 10
- 64. Ejemplo 2: Resolver la siguiente armadura: 4. Ensamblar la matriz de rigidez 1 2 3 4 5 6 7 8 9 10 𝐾 13.56 3.56 -3.56 -3.56 -10 0 0 0 0 0 ∗ 104 1 3.56 3.56 -3.56 -3.56 0 0 0 0 0 0 2 -3.56 -3.56 14.90 0.68 0 0 -7.5 0 -3.84 2.88 3 -3.56 -3.56 0.68 15.72 0 -10 0 0 2.88 -2.16 4 -10 0 0 0 21.34 2.88 -3.84 -2.88 -7.5 0 5 0 0 0 -10 2.88 12.16 -2.88 -2.16 0 0 6 0 0 -7.5 0 -3.84 -2.88 11.34 2.88 0 0 7 0 0 0 0 -2.88 -2.16 2.88 2.16 0 0 8 0 0 -3.84 2.88 -7.5 0 0 0 11.34 -2.88 9 0 0 2.88 -2.16 0 0 0 0 -2.88 2.16 10
- 65. Ejemplo 2: Resolver la siguiente armadura: 5. Resolver el sistema 13.56 3.56 -3.56 -3.56 -10 0 104 3.56 3.56 -3.56 -3.56 0 0 -3.56 -3.56 14.90 0.68 0 0 -3.56 -3.56 0.68 15.72 0 -10 -10 0 0 0 21.34 2.88 0 0 0 -10 2.88 12.16 D1x D1y D2x D2y D3x D3y 0 103 0 0 0 0 -30 𝑄𝐿 = 𝐾𝐿𝐿 𝐷𝐿 𝐷𝐿 = 𝐾𝐿𝐿 −1 𝑄𝐿 DL 0.28444 1 -1.51333 2 -0.24889 3 -0.98000 4 0.28444 5 -1.12000 6 𝑐𝑚 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 0 0 -7.5 0 -3.84 -2.88 104 0 0 0 0 -2.88 -2.16 0 0 -3.84 2.88 -7.5 0 0 0 2.88 -2.16 0 0 R4x R4y R5x R5y QR 4.0000254 1.6000128 -3.9999624 1.3999968 104 𝑘𝑔 QR 40.00 16.00 -39.99 13.99 𝑡 0.28444 -1.51333 -0.24889 -0.98000 0.28444 -1.12000 4 x 6 6 x 1
- 66. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db1 Di 0.28444 1 -1.51333 2 Dj -0.24889 3 -0.98000 4 Barra 1 𝑐𝑚 dij = 𝑟1 0.71 0.71 0 0 0 0 0.71 0.71 0.28444 -1.51333 -0.24889 -0.98000 0.71 0.71 0 0 0 0 0.71 0.71 dij 2 x 4 4 x 1 0 0 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘1 = 7.075 ∗ 104 1 −1 −1 1 𝑞1 7.075 ∗ 104 1 −1 −1 1 0 0 = = 0 0 𝑘𝑔 38.03𝑡 38.03𝑡 𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛 1′ 2′
- 67. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db1 Di 0.28444 1 -1.51333 2 Dj -0.24889 3 -0.98000 4 Barra 1 𝑐𝑚 dij = 𝑟1 0.71 0.71 0 0 0 0 0.71 0.71 0.28444 -1.51333 -0.24889 -0.98000 0.71 0.71 0 0 0 0 0.71 0.71 dij 2 x 4 4 x 1 -0.87251 -0.87251 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘1 = 7.075 ∗ 104 1 −1 −1 1 𝑞1 7.075 ∗ 104 1 −1 −1 1 -0.87251 -0.87251 = = 0 0 𝑘𝑔
- 68. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db2 Di -0.24889 3 -0.98000 4 Dj 0 7 0 8 Barra 2 𝑐𝑚 dij = 𝑟2 1 0 0 0 0 0 1 0 -0.24889 -0.98000 0 0 1 0 0 0 0 0 1 0 dij 2 x 4 4 x 1 -0.2489 0 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘2 = 7.5 ∗ 104 1 −1 −1 1 𝑞2 7.075 ∗ 104 1 −1 −1 1 -0.2489 0 = = -18666.67 18666.67 𝑘𝑔 18.67𝑡 18.67𝑡 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛 1′ 2′
- 69. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db3 Di 0.28444 1 -1.51333 2 Dj 0.28444 5 -1.12000 6 Barra 3 𝑐𝑚 dij = 𝑟3 1 0 0 0 0 0 1 0 0.28444 -1.51333 0.28444 -1.12000 1 0 0 0 0 0 1 0 dij 2 x 4 4 x 1 0.28444 0.28444 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘3 = 10 ∗ 104 1 −1 −1 1 𝑞3 10 ∗ 104 1 −1 −1 1 0.28444 0.28444 = = 0 0 𝑘𝑔 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛
- 70. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db4 Di 0.28444 5 -1.12000 6 Dj -0.24889 3 -0.98000 4 Barra 4 𝑐𝑚 dij = 𝑟4 0 1 0 0 0 0 0 1 0.28444 -1.12000 -0.24889 -0.98000 0 1 0 0 0 0 0 1 dij 2 x 4 4 x 1 -1.12 -0.98 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘4 = 10 ∗ 104 1 −1 −1 1 𝑞4 10 ∗ 104 1 −1 −1 1 -1.12 -0.98 = = -14000 14000 𝑘𝑔 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛
- 71. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db5 Di -0.24889 3 -0.98000 4 Dj 0 9 0 10 Barra 5 𝑐𝑚 dij = 𝑟5 0.80 −0.60 0 0 0 0 0.80 −0.60 -0.24889 -0.98000 0 0 0.80 −0.60 0 0 0 0 0.80 −0.60 dij 2 x 4 4 x 1 0.38888 0 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘5 = 6 ∗ 104 1 −1 −1 1 𝑞5 6 ∗ 104 1 −1 −1 1 0.38888 0 = = 23333.28 -23333.28 𝑘𝑔 𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛
- 72. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db6 Di 0.28444 5 -1.12000 6 Dj 0 7 0 8 Barra 6 𝑐𝑚 dij = 𝑟6 0.80 0.60 0 0 0 0 0.80 −0.60 0.28444 -1.12000 0 0 0.80 0.60 0 0 0 0 0.80 −0.60 dij 2 x 4 4 x 1 -0.444448 0 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘6 = 6 ∗ 104 1 −1 −1 1 𝑞6 6 ∗ 104 1 −1 −1 1 -0.444448 0 = = -26666.88 26666.88 𝑘𝑔 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛
- 73. Ejemplo 2: Resolver la siguiente armadura: 6. Resolver las fuerzas internas de barra Db7 Di 0.28444 5 -1.12000 6 Dj 0 7 0 8 Barra 7 𝑐𝑚 dij = 𝑟7 1 0 0 0 0 0 1 0 0.28444 -1.12000 0 0 1 0 0 0 0 0 1 0 dij 2 x 4 4 x 1 0.28444 0 = 𝑐𝑚 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗 𝑘7 = 7.5 ∗ 104 1 −1 −1 1 𝑞7 7.5 ∗ 104 1 −1 −1 1 -0.444448 0 = = 21 333 -21333 𝑘𝑔 𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛
- 74. Ejemplo 2: Resolver la siguiente armadura: 7. Resultados finales 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐴 = 1500 𝑚𝑚2 𝐸 = 200 𝐺𝑃𝑎 𝑅4𝑥 = 40 t 𝑅4𝑦 = 16 𝑡 𝑅5𝑥 = −39.99 t 𝑅5𝑦 = 13.99 𝑡 QR 40.00 16.00 -39.99 13.99 DL 0.28444 1 -1.51333 2 -0.24889 3 -0.98000 4 0.28444 5 -1.12000 6 𝐹 𝑎𝑐𝑡 = 26.67 𝑡 𝐹 𝑟𝑒𝑠𝑖𝑠𝑡 = 𝐴𝑠 ∗ 𝑓𝑦 = 15 ∗ 2500 = 37.5 𝑡 𝐹 𝑎𝑐𝑡 < 𝐹 𝑟𝑒𝑠𝑖𝑠𝑡 → 𝑜𝑘
- 75. Ejemplo 2: Resolver la siguiente armadura: 8. Deformada de la estructura 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐴 = 1500 𝑚𝑚2 𝐸 = 200 𝐺𝑃𝑎 DL 2.8444 1 -15.1333 2 -2.4889 3 -9.8000 4 2.8444 5 -11.2000 6 𝑚𝑚 1′ 2′ 3′
- 76. Normas del RNE E.010: Madera E.020: Cargas E.030: Diseño sino resistente E.040: Vidrio E.050: Suelos y Cimentaciones E.060: Concreto Armado E.070: Albañilería E.080: Diseño y Construcción con tierra reforzada E.090: Estructuras Metálicas E.100: Bambú E.101: Aisladores y Disipadores sísmicos (en proyecto)
- 77. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 𝐸, 𝐴 𝐿 En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑋 𝑌 𝑖 𝑗 𝜃 1 2 3 4 1 2 3 4 [Kij] K11 K12 K13 K14 1 K21 K22 K23 K24 2 K31 K32 K33 K34 3 K41 K42 K43 K44 4 Desplazamiento unitario en el gdl 1 Desplazamiento unitario en el gdl 2 Desplazamiento unitario en el gdl 3 Desplazamiento unitario en el gdl 4 𝑑 = 𝑞𝐿 𝐸𝐴 Ley de Hooke: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 𝐶𝑎𝑙𝑐𝑢𝑙𝑎𝑛𝑑𝑜 𝑘𝑖𝑗 𝑒𝑛 𝑒𝑙 𝑆𝐶𝐿
- 78. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷1 = 1 𝜃 𝑞𝑖𝑋 = 𝑄11 𝜃 𝑞𝑖 𝑞𝑖𝑌 = 𝑄21 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑞𝑖 = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 𝑞𝑖𝑋 = 𝑄11 = 𝑞𝑖 ∗ cosθ = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑖𝑌 = 𝑄21 = 𝑞𝑖 ∗ senθ = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 2 3 4
- 79. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑝𝑟𝑖𝑚𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷1 = 1 𝜃 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑞𝑗 = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 𝑞𝑗𝑋 = 𝑄31 = 𝑞𝑗 ∗ cosθ = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑗𝑌 = 𝑄41 = 𝑞𝑗 ∗ senθ = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 2 −𝑐𝑜𝑠2𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 4 𝑞𝑗 𝑞𝑗𝑋 = 𝑄31 𝜃 𝑞𝑗𝑌 = 𝑄41
- 80. La matriz de rigidez de barra de una armadura en el SGL se puede plantear de forma directa En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑖 𝑗 1 2 3 4 [Kij] 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2 𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 4 𝐷2 = 1 𝑞𝑖𝑋 = 𝐸𝐴 𝐿 𝑠𝑒𝑛 𝜃 ∗ 𝑐𝑜𝑠𝜃 = 𝑄12 𝑞𝑖𝑌 = 𝐸𝐴 𝐿 𝑠𝑒𝑛 𝜃 ∗ 𝑠𝑒𝑛 𝜃 = 𝑄2 La fuerza necesaria en “1” para producir un desplazamiento unitario en “2” es q*cosθ La fuerza necesaria en “2” para producir un desplazamiento unitario en “2” es q*senθ 𝑄12 = 𝐸𝐴 𝐿 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑄22 = 𝐸𝐴 𝐿 𝑠𝑒𝑛2𝜃 𝑞𝑖 𝑞𝑖𝑋 = 𝑄12 𝐻𝑜𝑜𝑘𝑒 𝜃 𝑞𝑖 𝑞𝑖𝑌 = 𝑄22 𝑞𝑖 = 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 𝜃
- 81. La matriz de rigidez de barra de una armadura en el SGL se puede plantear de forma directa En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 𝑖 𝑗 1 2 3 4 [Kij] 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2 𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 4 𝐷2 = 1 𝑄12 = 𝐸𝐴 𝐿 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑄22 = 𝐸𝐴 𝐿 𝑠𝑒𝑛2𝜃 𝑞𝑗 𝑞𝑗𝑋 = 𝑄42 𝜃 𝑞𝑗 𝑞𝑗𝑌 = 𝑄32 𝑞𝑗 = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 𝑞𝑗𝑋 = 𝑄32 = 𝑞𝑗 ∗ cosθ = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑗𝑌 = 𝑄42 = 𝑞𝑗 ∗ senθ = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑠𝑒𝑛𝜃 𝜃
- 82. La matriz de rigidez de barra de una armadura en el SGL se puede plantear de forma directa En general, cada elemento kij de la matriz de rigidez de cada barra es “la fuerza necesaria en el punto i para producir un desplazamiento unitario en j” 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2𝜃 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑠𝑒𝑛2𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 4 SGL
- 83. Ejemplo 3: Plantear la matriz de rigidez de barra directamente en el SCG 1 1 30 𝑡 3 𝑚 4 𝑚 3 𝑚 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 7 𝐸 = 200 𝐺𝑃𝑎 = 2 ∗ 106 𝑘𝑔/𝑐𝑚2 𝐴 = 1500 𝑚𝑚2 = 15 𝑐𝑚2 𝐷𝑒𝑙 𝑒𝑗𝑒𝑟𝑐𝑖𝑐𝑖𝑜 𝑎𝑛𝑡𝑒𝑟𝑖𝑜𝑟: 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 1 2 3 4 𝐾1 = 3.56 3.56 -3.56 -3.56 ∗ 104 1 3.56 3.56 -3.56 -3.56 2 -3.56 -3.56 3.56 3.56 3 -3.56 -3.56 3.56 3.56 4 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2 𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2 𝜃 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑠𝑒𝑛2𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 4 1 2 3 4 𝐾1 = 3.54 ∗ 104 1 2 3 4
- 84. Ejemplo 4: Resolver la siguiente armadura: 𝐸 = 90 000 𝑘𝑔/𝑐𝑚2 1 2 3 4 7 5 6 3 m 1 2 3 4 5 4 m 4 m 3 m 6 t 10 t 6 7 8 9 10 11 12 6" 8"
- 85. Ejemplo 4: Resolver la siguiente armadura: 1. Establecer el Sistema Coordenado de Referencia en el SCG” 2. Enumerar nudos, barras y grados de libertad. Identificar gdll y gdlr 1 2 3 4 7 5 6 3 m 1 2 3 4 5 4 m 4 m 3 m 6 t 10 t 6 7 8 9 10 11 12 1 2 3. Darle orientación a las barras (punto de inicio, punto final) 4. Plantear la matriz de rigidez de cada barra en el SCL 𝑘𝑖𝑗 = 𝐸𝐴 𝐿 1 −1 −1 1
- 86. Ejemplo 3: Resolver la siguiente armadura: 5. Plantear la matriz de rotación de cada barra 𝑟𝑖𝑗 = 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 0 0 0 0 𝑐𝑜𝑠𝜃 𝑠𝑒𝑛𝜃 6. Rotar las matrices de rigidez de cada barra: SCL al SCG 𝐾𝑖𝑗 = 𝑟𝑖𝑗 𝑡 𝑘𝑖𝑗 𝑟𝑖𝑗 7. O plantear de la matriz de rigidez de cada barra directamente en el SCG 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2𝜃 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑠𝑒𝑛2𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 4
- 87. Ejemplo 3: Resolver la siguiente armadura: 8. Ensamblar la matriz de rigidez global
- 88. Ejemplo 3: Resolver la siguiente armadura: 9. Ordenar la matriz de rigidez global KLL KLR KRL KRR 10. Resolver el sistema 𝑄𝐿 = 𝐾𝐿𝐿 𝐷𝐿 𝑄𝑅 = 𝐾𝑅𝐿 𝐷𝐿 𝐷𝐿 = 𝐾𝐿𝐿 −1 𝑄𝐿 11. Resolver las fuerzas internas en las barras rij Di rij Dj dij = 𝑞 = 𝑘𝑖𝑗 𝑑𝑖𝑗
- 89. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑡𝑒𝑟𝑐𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷3 = 1 𝜃 𝑞𝑖𝑋 = 𝑄13 𝜃 𝑞𝑖 𝑞𝑖𝑌 = 𝑄23 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑞𝑖 = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 𝑞𝑖𝑋 = 𝑄13 = 𝑞𝑖 ∗ cosθ = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑖𝑌 = 𝑄23 = 𝑞𝑖 ∗ senθ = − 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2 𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2 𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 4
- 90. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑡𝑒𝑟𝑐𝑒𝑟𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷3 = 1 𝜃 𝑞𝑗𝑋 = 𝑄33 𝑞𝑗 𝑞𝑗𝑌 = 𝑄43 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑞𝑗 = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 𝑞𝑗𝑋 = 𝑄33 = 𝑞𝑗 ∗ cosθ = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑗𝑌 = 𝑄43 = 𝑞𝑖 ∗ senθ = 𝐸𝐴 𝐿 𝑐𝑜𝑠𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2 𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2 𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 4
- 91. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑐𝑢𝑎𝑟𝑡𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷4 = 1 𝜃 𝑞𝑖𝑋 = 𝑄14 𝜃 𝑞𝑖 𝑞𝑖𝑌 = 𝑄24 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑞𝑖 = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 𝑞𝑖𝑋 = 𝑄14 = 𝑞𝑖 ∗ cosθ = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑖𝑌 = 𝑄24 = 𝑞𝑖 ∗ senθ = − 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2 𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2 𝜃 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑠𝑒𝑛2𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 4
- 92. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 𝑃𝑎𝑟𝑎 𝑙𝑎 𝑐𝑢𝑎𝑟𝑡𝑎 𝑐𝑜𝑙𝑢𝑚𝑛𝑎: 𝐷4 = 1 𝜃 𝐴𝑑𝑒𝑚á𝑠: 𝑞 = 𝐸𝐴 𝐿 𝑑 𝑗 = 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 𝑞𝑗𝑋 = 𝑄34 = 𝑞𝑗 ∗ cosθ = 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑐𝑜𝑠𝜃 𝑞𝑗𝑌 = 𝑄44 = 𝑞𝑗 ∗ senθ = 𝐸𝐴 𝐿 𝑠𝑒𝑛𝜃 ∗ 𝑠𝑒𝑛𝜃 1 2 3 4 [Kij] = 𝐸𝐴 𝐿 𝑐𝑜𝑠2 𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑐𝑜𝑠2 𝜃 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 1 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 −𝑠𝑒𝑛2𝜃 2 −𝑐𝑜𝑠2𝜃 −𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 𝑐𝑜𝑠2𝜃 𝑠𝑒𝑛 𝜃 𝑐𝑜𝑠𝜃 3 −𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 −𝑠𝑒𝑛2𝜃 𝑐𝑜𝑠𝜃𝑠𝑒𝑛𝜃 𝑠𝑒𝑛2𝜃 4 𝑞𝑗𝑋 = 𝑄34 𝑞𝑗 𝑞𝑗𝑌 = 𝑄44
- 93. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa 1 1 2 3 4 5 2 3 4 1 2 3 4 5 6 7 8 9 10 11 12 6 5 7 Barra ϴ 1 0 2 0 3 90 4 0 5 0 6 45 7 90 8 315
- 94. La matriz de rigidez de barra de una armadura en el SCG se puede plantear de forma directa