1. Introducción a los sistemas digitales de cómputo:
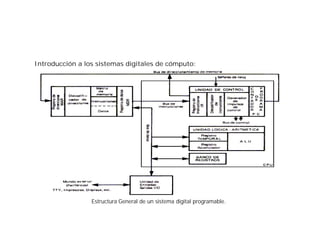
Estructura General de un sistema digital programable.
2. Introducción a los sistemas digitales de cómputo:
Unidad de Memoria.
Dispone de Memoria de Programa donde se almacenan las instrucciones que debe
ejecutar el sistema y Memoria de Datos para guardar datos y resultados de forma
temporal.
Unidad Central de Procesos CPU.
Integrada por la Unidad de Control UC, la Unidad Aritmético Lógica ALU, el Banco de
Registros de trabajo BR y las Señales de Reloj Y Control. La CPU crea y controla el flujo
de datos que maneja el sistema a partir del conjunto de instrucciones que conforman el
programa, además gobierna las unidades de interfase de entrada y salida para
intercambiar información con el mundo exterior.
Unidad de Interfase de Entradas y Salidas.
Es la encargada de adecuar los códigos y/o protocolos de comunicación para
intercambiar información con el mundo exterior, de una manera lógica para el sistema.
3. Introducción a los sistemas digitales de cómputo:
Estructura general de un CPU.
4. Introducción a los sistemas digitales de cómputo:
Unidad de Control UC.
La UC se encarga de la interpretación y ejecución de las instrucciones del programa, así
como de controlar el funcionamiento y operación de todos los elementos del sistema a
través de las señales de control agrupadas en la Palabra de Control.
Unidad aritmético-lógica ALU.
La ALU realiza todas las operaciones aritméticas y lógicas que requieran las
instrucciones. Tiene 2 entradas de las cuales la más importante es el acumulador que
siempre toma el resultado de las operaciones. Luego de cada operación en la ALU se
actualiza el registro de banderas llamado Palabra de Estado.
Banco de Registros BR.
El BR es un grupo de registros de propósito general y algunos de uso especializado,
que permiten el almacenamiento temporal de los datos que requiere la CPU y ayudan a
reducir el tiempo de proceso, ya que de no existir, la CPU tendría que estar accediendo
con mayor frecuencia a la MU.
5. ¿Qué es un microprocesador μP?
Un Microprocesador es un CI VLSI que incorpora en un mismo
encapsulado solo un CPU (UC, ALU, BR) requiriendo así la conexión
externa de todos los otros elementos para completar un sistema de
control programable.
Se requiere agregar varios circuitos integrados solo para el
sistema programable y según la aplicación se añaden otros tantos más.
6. ¿Qué es un microcontrolador μC?
Un Microcontrolador es un CI VLSI que incorpora en un mismo
encapsulado todos los elementos necesarios para implementar un
sistema de control programable.
Solo se requiere agregar los elementos de entrada / salida
que son específicos de cada aplicación.
9. • Microcontrolador:
– Circuito integrado que contiene en si todos los
componentes de un computador (CPU, ROM,
RAM, Puertos, Contadores, PWM, CAD, CDA…)
– Controlan muchos de los aparatos que se
utilizan día a día: carro, teléfono, lavadora,
juguetes… avión, robots, procesos.
13. Los μC PIC
Son Circuitos Integrados Programables (por sus siglas en inglés)
fabricados por Microchip.
- Se basan en la arquitectura Harvard.
- Son RISC.
- Se presentan en 5 gamas principales según la complejidad
- La memoria de programa que manejan es variada: EPROM, FLASH
y OTP.
- Algunos modelos incluyen memoria EEPROM para datos.
- Tienen poderosos módulos de aplicación específica integrados:
Temporizadores, Módulos de Captura, Comparación y PWM, Puerto
Serie Síncrono, Interfaz Serial de Comunicación USART, ADC 8 y 10
bits de 1 a 8 canales, Módulo de manejo de LCD, Puerto paralelo
esclavo, etc.
14. y los PICs???
• Para lograr una compactación de código
óptima y una velocidad superior a la de sus
competidores los microcontroladores PIC
incorporan en su procesador tres
características más avanzadas:
– Procesador tipo RISC
– Procesador segmentado
– Arquitectura Harvard
15. y los PICs???
• Los procesadores RISC son capaces de
ejecutar las instrucciones en solo un ciclo
de máquina (excepto las de salto).
• El juego de instrucciones y los modos de
direccionamiento se reducen al máximo y
consigue una compactación del código muy
grande.
16. y los PICs???
• Con la estructura segmentada (pipe-line),
al mismo tiempo que se desarrolla la fase
de ejecución de una instrucción se realiza
la fase de búsqueda de la siguiente.
• De esta manera puede trabajar con varias
instrucciones a la vez.
17. y los PICs???
La arquitectura Harvard permite acceder de
forma simultánea e independiente a la memoria
de datos y a la de instrucciones.
Este aislamiento y diferenciación permiten que
cada una tenga la longitud y tamaño más
adecuado
24. Microcontroladores PIC de 8 bits, Comparación
Enhanced Mid-Range
Baseline Architecture Mid-Range Architecture PIC18 Architecture
Architecture
Pin Count 6-40 8-64 8-64 18-100
Single interrupt capability
Multiple interrupt
Interrupts No Single interrupt capability with hardware context capability with hardware
save context save
Performance 5 MIPS 5 MIPS 8 MIPS Up to 16 MIPS
Instructions 33, 12-bit 35, 14-bit 49, 14-bit 83, 16-bit
Program Memory Up to 3 KB Up to 14 KB Up to 28 KB Up to 128 KB
Data Memory Up to 138 Bytes Up to 368 Bytes Up to 1,5 KB Up to 4 KB
Hardware Stack 2 level 8 level 16 level 32 level
In addition to In addition to
In addition to Baseline:
Mid-Range: Enhanced Mid-Range:
•SPI/I²C™
•Comparator •Multiple Communication •8x8 Hardware Multiplier
•UART
•8-bit ADC Peripherals •CAN
Features •PWMs
•Data Memory •Linear Programming •CTMU
•LCD
•Internal Oscillator Space •USB
•10-bit ADC
•PWMs with Independent •Ethernet
•Op Amp
Time Base •12-bit ADC
High performance,
Lowest cost in the smallest Optimal cost to Cost effective with more optimized for C
Highlights
form factor performance ratio performance and memory programming, advanced
peripherals
Total Number of Devices 16 58 29 193
Families PIC10, PIC12, PIC16 PIC12, PIC16 PIC12FXXX, PIC16F1XX PIC18
30. Microcontroladores PIC de 16 bits, Comparación
dsPIC33F/E: High Performance DSCs PIC24F: Low Power
•Up to 70 MIPS DSP performance at 3.3V •Low cost 16-bit families
•Up to 32 Ch. high performance 10/12-bit ADCs •eXtreme Low Power (XLP) devices
•Digital Power, Motor Control and Audio Peripherals •16 MIPS performance @ 3.3V
•Integrated Op Amps •Up to 96 KB RAM
•Up to 2 CAN, I²C™, SPI and PMP •Integrated USB-OTG, Graphics, CTMU and RTCC
•Extended and high-temperature(150°C) options •Motor Control Peripherals
dsPIC30F: Versatile 5V DSCs PIC24H/E: Highest Performance
•30 MIPS DSP performance 5V •Up to 70 MIPS performance at 3.3V
•Up to 4 KB EEPROM •High performance 10/12-bit ADC
•Motor Control peripherals •DMA channels for faster data transfer
•Integrated Codec interface •Motor Control peripherals and integrated op amps
•Up to 2 CAN, I²C™, SPI and PMP
•Extended and high-temperature(150°C) options
32. Microcontroladores PIC de 32 bits
MIPS M4K Core
Quick Time to Market
Up to 80 MHz, 1.65 DMIPS/MHz
Free software with source code
5 Stage Pipeline devices
Easy to use Starter Kits
Instruction Trace
Application Development Boards
Temperature Range: -40°C to 105°C
AEC-Q100 qualified
Connected Peripherals with DMA
Full-speed USB Host/Device/OTG
Date and Code
10/100 Ethernet MAC with MII/RMII Interfaces
Up to 512 KB Flash
2x CAN 2.0B Ports
Up to 128 KB SRAM
Up to 6 UART, 5 I²C™, 4 SPI Ports, CTMU and I²S
Prefetch Buffer Cache
Up to 8 Additional Channels of General Purpose DMA
Separate Buses for Instructions
and Data
35. Desarrollo de aplicaciones con μC
Entenderemos por aplicación, la integración de hardware y/o software para la realización de
una tarea especifica.
Fases de una aplicación con μC.
Análisis. Se busca comprender las necesidades a ser cubiertas exactamente.
Diseño. Se debe establecer el uso de los pines y módulos del micro, así como se listan
las variables necesarias y se elabora un algoritmo para el programa. Se deben definir
las necesidades de hardware adicional al micro así como la fuente de alimentación.
Codificación. Se crea un archivo con las instrucciones que se le cargaran al micro. En
cuanto a la codificación se sugiere entre otras cosas que sea estructurada, modular y lo
mas eficiente posible por la limitación de recursos internos que tiene un micro.
Implementación, pruebas y depuración. El archivo codificado debe ser simulado,
compilado, cargado en el micro, puesto en marcha, detectado errores, vuelta a codificar
(o diseñar) hasta que se considere apto para su explotación o entrega al usuario final.
Estas pruebas incluyen tanto protoboard como bakelita.
Documentación. Desde el inicio se debe escribir todo lo concerniente al proyecto
hasta un manual de usuario y mantenimiento.
Explotación. Uso por parte del usuario de la aplicación.
36. PIC 18F452
• Características:
– Memoria de programa (flash): 32 KB
– Memoria de datos (RAM): 1536 B
– Memoria de datos (EEPROM): 256 B
– Frecuencia de operación: hasta 40 MHz
– Fuentes de Interrupciones: 18
– Puertos de I/O: Port A, B, C, D, E
– Temporizadores: 4
– Módulos PWM: 2
– Comunicación serie: MSSP y USART
– Comunicación paralela: PSP
– Convertidores AD: 8 canales de 10 bits
38. PIC 18F452
• Mapa de memoria
– Memoria de programa:
• (Flash) 32K de 16bit
• Vector Reset en 0000h
• Vectores de interrupciones:
• 0008h-0018h
– Aparte:
• Stack de 31 niveles
• Contador de programa de 20bit
39. PIC 18F452
• Mapa de memoria
– Memoria de datos:
• 1536 byte RAM (8bit)
• Divididos en 15 bancos
• Los 14 primeros funcionan como
registros de propósito general
• El 15 contiene los registros de funciones
especiales
– Aparte:
• 256 byte EEPROM (8bit)