Descargar como PDF, PPTX
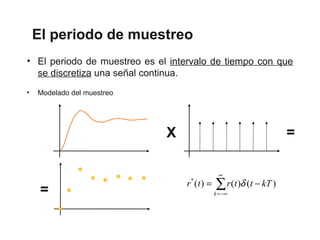




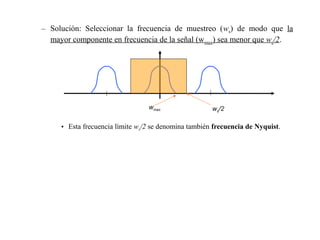














El documento describe el proceso de muestreo de señales continuas, incluyendo la frecuencia de muestreo y el aliasing. Explica que la frecuencia de muestreo debe ser al menos el doble de la frecuencia máxima de la señal para evitar el aliasing y permitir la reconstrucción de la señal original. También cubre consideraciones prácticas para la elección del periodo de muestreo en sistemas de control.






































![Transformada de laplace_1[1]](https://cdn.slidesharecdn.com/ss_thumbnails/transformadadelaplace11-110907232804-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


































