
Recomendados
Más contenido relacionado
La actualidad más candente
Destacado
Similar a Laboratorio E2
Similar a Laboratorio E2 (20)
Laboratorio E2
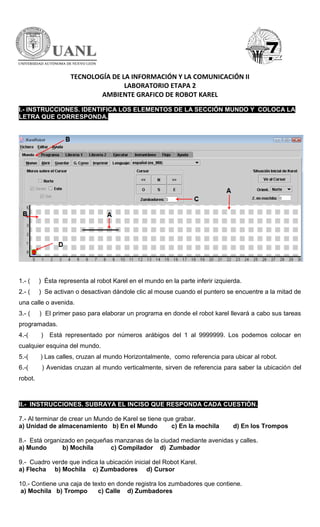
- 1. UANL UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN TECNOLOGÍA DE LA INFORMACIÓN Y LA COMUNICACIÓN II LABORATORIO ETAPA 2 AMBIENTE GRAFICO DE ROBOT KAREL I.- INSTRUCCIONES. IDENTIFICA LOS ELEMENTOS DE LA SECCIÓN MUNDO Y COLOCA LA LETRA QUE CORRESPONDA. 1.- ( ) Ésta representa al robot Karel en el mundo en la parte inferir izquierda. 2.- ( ) Se activan o desactivan dándole clic al mouse cuando el puntero se encuentre a la mitad de una calle o avenida. 3.- ( ) El primer paso para elaborar un programa en donde el robot karel llevará a cabo sus tareas programadas. 4.-( ) Está representado por números arábigos del 1 al 9999999. Los podemos colocar en cualquier esquina del mundo. 5.-( ) Las calles, cruzan al mundo Horizontalmente, como referencia para ubicar al robot. 6.-( ) Avenidas cruzan al mundo verticalmente, sirven de referencia para saber la ubicación del robot. II.- INSTRUCCIONES. SUBRAYA EL INCISO QUE RESPONDA CADA CUESTIÓN. 7.- Al terminar de crear un Mundo de Karel se tiene que grabar. a) Unidad de almacenamiento b) En el Mundo c) En la mochila d) En los Trompos 8.- Está organizado en pequeñas manzanas de la ciudad mediante avenidas y calles. a) Mundo b) Mochila c) Compilador d) Zumbador 9.- Cuadro verde que indica la ubicación inicial del Robot Karel. a) Flecha b) Mochila c) Zumbadores d) Cursor 10.- Contiene una caja de texto en donde registra los zumbadores que contiene. a) Mochila b) Trompo c) Calle d) Zumbadores
- 2. 11.- Se utiliza para grabar por primera vez el mundo de Karel o para cambiarle el nombre que estamos creando. a) Imprimir b) Guarda como c) Guardar d) Abrir 12.- Pide la configuración, después el porcentaje del factor de escala y por último confirma el dispositivo a utilizar y cantidad. a) Guardar b) Abrir c) Guardar como d) Imprimir 13.- Es donde se escribirán las instrucciones que se ejecutarán paso a paso. a) Evaluar b) Sección o pestaña Programa c) Compilar d) Ejecutar 14.- Tipos de lenguaje en que se puede escribir las instrucciones del programa. a) Pascal y Java b) Máquina y Fortran c) Dbase y Cobol d) Lotus y Paint 15.- La dirección que indica la flecha azul. a) Es el lugar en que Karel estará viendo tiene Muros d) Donde se compila b) Es el área de trabajo c) Indica que 16.- Se utiliza para observar la realización de un solo paso o instrucción del robot hacia adelante en el programa. a) Atrás b) Pasos/min c) Saltar paso d) Adelante 17.- Modifica la velocidad de ejecución del programa. a) Saltar obstáculo b) Caminar rápido c) Adelante d) Pasos/min 18.-Son instrucciones que emplean para detectar diferentes condiciones dentro del entorno del robot karel y van incluidas dentro de un comando. a) Mochila b) Atrás c) Sensores d) Distractores 19.- Instrucción inicial de todo programa. a) class program { b) program( ) { c) turn off ( ) ; d) rightlsblocked ( ) 20.- Zona para que escribas las instrucciones de tu programa. a) program( ) { b) class program { c) rightlsblocked ( ) ); 21.- Instrucción para finalizar el programa. a) rightlsblocked ( ) b) class program { c) program( ) { d) turn off ( d) turn off ( ) ; III.- Instrucciones. Relaciona las columnas. A notFacingwest ( ) ( ) 22.- No estoy en dirección sur. B facingSouth ( ) ( ) 23.- No estoy junto a un trompo. C rightlsBlocked ( ) ( ) 24.- No estoy en dirección Oeste D notFacingEast ( ) ( ) 25.- Estoy en dirección Sur. A facingNorth ( ) ( ) 26.- Está bloqueado a mi izquierda. B rightlsClear ( ) ( ) 27.- Está despejado a mi derecha. C notFacingSouth ( ) ( ) 28.- Hay algún trompo en mi mochila de trompos. D noBeepersinBeeperBag ( ) ( ) 29.- Está despejado a mi izquierda. A leftlsBlocked ( ) ( ) 30. Estoy en dirección oeste. B noNextToABeeper ( ) ( ) 31.- No estoy en dirección norte. C anyBeepersinBeeperBag ( ) ( ) 32.- No hay trompos en mi mochila de trompos. D leftlsClear ( ) ( ) 33.- Estoy en dirección norte. A facingWest ( ) ( ) 34.- Está bloqueado a mi derecha.
- 3. IV.- INSTRUCCIONES. IDENTIFICA LOS ELEMENTOS DE LA SECCIÓN PROGRAMA Y DESCRIBE SU FUNCIÓN. 35.36.37.38.39.40.-