Electroneumática y Neumática: Método de intuitivo a los métodos de diseño: señales, permanentes y diagramas
•
0 recomendaciones•328 vistas

PLC, Neumática y electroneumática

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Electroneumática y Neumática: Método de intuitivo a los métodos de diseño: señales, permanentes y diagramas
Similar a Electroneumática y Neumática: Método de intuitivo a los métodos de diseño: señales, permanentes y diagramas (20)
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
Electroneumática y Neumática: Método de intuitivo a los métodos de diseño: señales, permanentes y diagramas
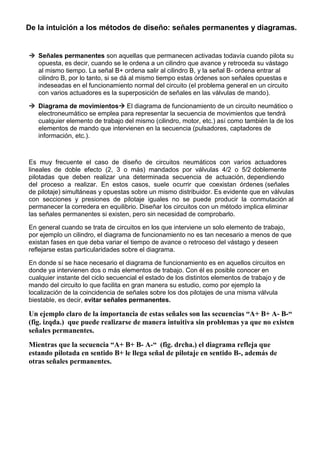
- 1. De la intuición a los métodos de diseño: señales permanentes y diagramas. Señales permanentes son aquellas que permanecen activadas todavía cuando pilota su opuesta, es decir, cuando se le ordena a un cilindro que avance y retroceda su vástago al mismo tiempo. La señal B+ ordena salir al cilindro B, y la señal B- ordena entrar al cilindro B, por lo tanto, si se dá al mismo tiempo estas órdenes son señales opuestas e indeseadas en el funcionamiento normal del circuito (el problema general en un circuito con varios actuadores es la superposición de señales en las válvulas de mando). Diagrama de movimientos El diagrama de funcionamiento de un circuito neumático o electroneumático se emplea para representar la secuencia de movimientos que tendrá cualquier elemento de trabajo del mismo (cilindro, motor, etc.) así como también la de los elementos de mando que intervienen en la secuencia (pulsadores, captadores de información, etc.). Es muy frecuente el caso de diseño de circuitos neumáticos con varios actuadores lineales de doble efecto (2, 3 o más) mandados por válvulas 4/2 o 5/2 doblemente pilotadas que deben realizar una determinada secuencia de actuación, dependiendo del proceso a realizar. En estos casos, suele ocurrir que coexistan órdenes (señales de pilotaje) simultáneas y opuestas sobre un mismo distribuidor. Es evidente que en válvulas con secciones y presiones de pilotaje iguales no se puede producir la conmutación al permanecer la corredera en equilibrio. Diseñar los circuitos con un método implica eliminar las señales permanentes si existen, pero sin necesidad de comprobarlo. En general cuando se trata de circuitos en los que interviene un solo elemento de trabajo, por ejemplo un cilindro, el diagrama de funcionamiento no es tan necesario a menos de que existan fases en que deba variar el tiempo de avance o retroceso del vástago y deseen reflejarse estas particularidades sobre el diagrama. En donde sí se hace necesario el diagrama de funcionamiento es en aquellos circuitos en donde ya intervienen dos o más elementos de trabajo. Con él es posible conocer en cualquier instante del ciclo secuencial el estado de los distintos elementos de trabajo y de mando del circuito lo que facilita en gran manera su estudio, como por ejemplo la localización de la coincidencia de señales sobre los dos pilotajes de una misma válvula biestable, es decir, evitar señales permanentes. Un ejemplo claro de la importancia de estas señales son las secuencias “A+ B+ A- B-“ (fig. izqda.) que puede realizarse de manera intuitiva sin problemas ya que no existen señales permanentes. Mientras que la secuencia “A+ B+ B- A-“ (fig. drcha.) el diagrama refleja que estando pilotada en sentido B+ le llega señal de pilotaje en sentido B-, además de otras señales permanentes.
- 2. SECUENCIAS DE MOVIMIENTOS Una secuencia se define cuando se tienen dos o más accionamientos que deben realizar sus movimientos de forma coordinada según un orden establecido. Generalmente se utilizan los detectores de posición o finales de carrera para determinar la posición exacta del momento en el que se deben ir activando los movimientos. Aunque cada uno de los accionamientos es conectado de forma independiente, la ubicación de los detectores de posición determina la secuencia a seguir ordenadamente. Una secuencia se puede representar: De forma simplificada: A+B+C+B-A-C- Por medio de un diagrama de movimientos. Regla del Método secuencial: la señal del último movimiento genera el siguiente movimiento. Diagrama de movimientos El diagrama de movimientos de un ciclo neumático o electroneumático puede estar formado por uno o ambos de los diagramas expuestos seguidamente: Diagrama espacio-fase. Diagrama espacio-tiempo. Diagrama espacio-fase También se le llama diagrama de proceso y en él se representan los movimientos o estados de los elementos de trabajo en función de las fases o pasos del ciclo o programa, por ejemplo vástago del cilindro saliendo o entrando y vástago del cilindro entrado o salido sin tener en cuenta el tiempo que tarda en efectuar estas operaciones. Para su representación se tendrán en cuenta los siguientes puntos: a) Cada elemento de trabajo tendrá representado su propio ciclo. b) Los ciclos de los distintos elementos de trabajo serán representados uno a continuación de otro y de arriba hacia abajo.
- 3. c) Se dibujan dos líneas horizontales y paralelas para cada elemento de trabajo. La distancia entre ellas se considera como el " Espacio" entre vástago entrado y salido. Esta distancia no se representa a escala sino con una magnitud igual para todos los elementos de trabajo, independientemente de su carrera. d) Para cada cilindro siguiente se dibujan dos nuevas líneas paralelas debajo de las anteriores separadas por una distancia menor a la empleada para los pares de líneas anteriores, pero suficiente para que el diagrama quede claro y legible. e) Las líneas paralelas anteriores se cortan por líneas perpendiculares a las mismas y equidistantes. Cada línea vertical se considera como una "Fase" o " Paso " del ciclo numerándose a partir de 1 desde la izquierda. f) En la fase a partir de la cual el ciclo vuelve a repetirse, por ejemplo en la 5 anterior, se coloca 5 = 1.
- 4. g) En la parte izquierda y entre cada dos líneas paralelas de mayor anchura se indica el código de identificación del elemento de trabajo considerado, por ejemplo "Cilindro 1A", "Cilindro 2A", etc. o simplemente 1A, 2A, etc. También es conveniente colocar junto a lo anterior la función del elemento de trabajo (por ejemplo sujeción, remachado, etc.). h) En la línea superior de las dos que representan a un elemento de trabajo se anota vástago salido o bien 1, mientras que en la línea inferior se indica vástago entrado o bien O.
- 5. i) El desarrollo del ciclo de cada elemento de trabajo se representa por líneas gruesas entre fases, uniendo de forma adecuada los puntos de intersección de las líneas que representan las fases con las dos líneas horizontales paralelas que cortan a las mismas. En el diagrama espacio-fase anterior se puede comprobar que de la fase 1 a la fase 2 el cilindro 1A (sujeción) va desde su posición entrado a su posición salido que alcanza en la fase 2. En ese instante el cilindro 2A (remachado) efectúa la misma operación desde la fase 2 a la fase 3 siguiendo el 1A en la posición salido. En la fase 3 el cilindro 2A va desde la posición salido a la posición entrado que alcanza en la fase 4. En ese instante se inicia la entrada del cilindro 1A que finaliza en la fase 5, en cuyo instante los dos cilindros vuelven a estar en la situación de la fase 1. Si los elementos de trabajo son rotativos puede optarse por realizar el diagrama bajo la configuración que se indica en la figura 1 que muestra el estado de conexión y desconexión de distintos motores neumáticos. Como se ha podido comprobar la relación entre los distintos elementos de trabajo de un ciclo neumático queda perfectamente indicada observando las fases de su diagrama espacio-fase.
- 6. El diagrama espacio-fase es aconsejable emplearlo para representar ciclos secuenciales controlados por el propio proceso en los que normalmente el tiempo no interviene en su desarrollo o bien tiene una importancia secundaria. Diagrama espacio-tiempo En el diagrama espacio-fase comentado en el punto anterior se aprecia el cambio de estado de un elemento de trabajo, pero no se aprecia la velocidad relativa del mismo. En cambio, en el diagrama espacio-tiempo el espacio que recorre el elemento de trabajo es representado en función del tiempo que se indica en el eje de abscisas, por lo que de hecho el diagrama está facilitando la velocidad del elemento de trabajo. El trazado es muy similar al del diagrama espacio-fase. Únicamente las líneas verticales ya no serán equidistantes entre sí al tener que considerar ahora el tiempo que tarda por ejemplo el cilindro en hacer su recorrido de avance o de retroceso. Además de todo lo expuesto para el diagrama espacio-fase, en la parte inferior del diagrama espacio-tiempo debe figurar la escala del tiempo. Con ello se podrán considerar las distintas velocidades de actuación que tendrán los elementos de trabajo en el ciclo. En la figura 2 se representa un diagrama espacio-tiempo para dos cilindros. El cilindro 1A va de la fase 1 a la 2 con una velocidad de avance que puede considerarse normal, tardando 8 segundos en salir su vástago. A continuación de la fase 2 a la 3 sale el vástago del cilindro 2A con una velocidad de avance que se considera lenta, al tardar 12 segundos. De la fase 3 a la 4 entra el vástago de 1A con una velocidad de retroceso que se considera rápida, al tardar 4 segundos en realizar esta operación. Finalmente, de la fase 4 a la 5 entra. el vástago del cilindro 2A con la misma velocidad de retroceso normal considerada, es decir con un tiempo de 8 segundos. El diagrama espacio-tiempo es aconsejable emplearlo para representar ciclos programados en los que la consideración del tiempo es ya importante en su desarrollo.
- 7. Diagrama de mando El diagrama de mando se emplea para representar el estado de actuación o conexión de los distintos elementos de mando o conmutación (válvulas de vías con accionamiento manual, mecánico, con aire, etc.) en función de la fase o del tiempo según se considere uno u otro diagrama anterior. No se acostumbra a tener en cuenta en la representación el tiempo que la válvula necesita para su conmutación, es decir el tiempo que tarda en pasar de abierta a cerrada o viceversa. Por ello se considera que el cambio es instantáneo. Tiene una representación similar a los anteriores diagramas indicándose dos líneas paralelas horizontales para cada elemento con una distancia entre ellas algo menor (aproximadamente la mitad de la considerada para los elementos de trabajo). Son cortadas por las mismas líneas verticales ya indicadas, es decir que el diagrama de mando se traza en combinación con el diagrama espacio-fase o espacio-tiempo. En la figura 3 se indica el diagrama de mando para una válvula 3/2 vías, NC con accionamiento mecánico. En la fase 1 la vía 1 de la válvula está cerrada, y la utilización 2 está conectada al escape 3. En la fase 2 tiene lugar la actuación de la válvula pasando a abierta, es decir que las vías 1 y 2 quedan comunicadas y la vía 3 obturada, estado que se mantiene hasta la fase 5 en que la válvula vuelve a su posición inicial. De hecho, cuando la válvula es de accionamiento mecánico la leva del elemento de trabajo la actúa unos instantes antes de llegar a la correspondiente fase, mientras que en el retroceso la leva deja de actuaria unos instantes más tarde de la correspondiente fase. Esta situación es aconsejable representarla en el diagrama de mando como se indica en la figura 4. Hay aplicaciones en que el elemento de mando, por ejemplo una válvula de accionamiento manual, es actuada sólo durante el pequeño instante de la puesta en marcha. En este caso tal situación vendrá reflejada como se indica en la figura 5.
- 8. En la figura 6 se indica el diagrama de mando para una electroválvula de dos posiciones con dos bobinas que es actuada por un conmutador de tres posiciones. Diagrama de funcionamiento El diagrama de funcionamiento reúne en uno solo a los dos diagramas vistos con anterioridad, es decir el diagrama espacio-fase y/o el diagrama espacio-tiempo con el diagrama de mando. Con él ya es posible ver la situación de cada uno de los elementos que intervienen en el ciclo neumático o electroneumático. Para su representación se indicará en 1º lugar y de arriba hacia abajo el diagrama espacio-fase y/o el diagrama espacio-tiempo correspondiente a los elementos de trabajo. A continuación, y debajo de aquél se representará el diagrama de mando indicando en primer lugar la válvula de puesta en marcha del ciclo y a continuación los captadores de información o válvulas de accionamiento mecánico que son las que establecerán los cambios de fase. Como primer ejemplo en la figura 7 se indica el diagrama de funcionamiento para el accionamiento de un cilindro de doble efecto actuado por una válvula 5/2 vías con accionamiento neumático (biestable). El vástago del cilindro debe salir al actuar una válvula 3/2 vías de accionamiento manual (monoestable) y debe regresar al ser actuada una válvula 3/2 vías de accionamiento mecánico por una leva fijada al vástago.
- 9. Como segundo ejemplo en la figura 8 la representación esquemática y el diagrama espacio-fase de una instalación en la que una pieza es empujada y sujetada por un cilindro 1A mientras que a continuación es estampada por otro cilindro 2A.
- 10. ELIMINACION DE SEÑALES PERMANENTES Los distintos movimientos de una máquina accionada neumáticamente son producidos por sus elementos de trabajo, en general cilindros, quienes a través de unas determinadas órdenes de mando producen una secuencia de trabajo indicada en el diagrama de funcionamiento. La duración del diagrama de funcionamiento depende directamente de la velocidad del vástago de los cilindros que intervienen en el mismo y del número de ellos, y si los desplazamientos no deben ser consecutivos es necesario instalar los temporizadores adecuados y conectarlos en el momento oportuno. Una vez realizado el esquema neumático de forma intuitiva pueden aparecer en ciertos instantes del ciclo una coincidencia de señales sobre los pilotajes opuestos de una misma válvula que impedirían el desarrollo correcto del diagrama de funcionamiento. Dos sistemas pueden considerarse para solucionarlo: Anulación del efecto de la señal permanente. No se trata de anular la señal permanente sino de dominarla por otra señal mayor. Se distinguen: a) Válvula diferencial con accionamiento neumático. b) Reductor de presión. Eliminación de la señal permanente. Para la eliminación de señales completamente se dispone de las siguientes posibilidades A. Con válvula de accionamiento mecánico unidireccional: Consiste en el empleo de válvulas con accionamiento mecánico unidireccional, llamadas también válvulas con rodillo escamoteable. B. Con válvula biestable: Método cascada. C. Con válvula biestable: Método paso a paso. D. Con temporizadores: Método por corte de la señal de mando (implementación de un timer para desactivar la señal que crea el conflicto). Principalmente se usa el diagrama de tiempo- movimiento que nos indican en que elemento y solenoide se encuentra el control doble, permitiendo intercalar un temporizador para esperar a que desaparezca la orden para que entre la siguiente de la secuencia. E. Secuenciadores: bloques “pre programados” por los fabricantes para funciones secuenciales. En la industria se utiliza la neumática para automatizar pequeños procesos, esta es una tecnología muy fácil de usar y en la mayoría de ocasiones se utiliza en líneas de fabricación secuencial. Cuando se diseñan procesos secuenciales con neumática, se debe tener en cuenta la serie de movimientos realizados por los actuadores para cumplir su objetivo, y para diseñar un sistema de ese tipo es necesario recurrir a los métodos explicados para tal fin.
- 11. Válvula diferencial con accionamiento neumático La válvula diferencial tiene los dos pilotajes de distinto diámetro, de forma que con una misma presión aplicada a ambos la fuerza (F = P x S) es mayor en el pilotaje de mayor diámetro. Si la señal permanente se aplica al pilotaje de menor diámetro al presentarse la señal en el otro pilotaje dominará a la señal permanente modificando la posición de la válvula. En la figura obsérvese que si se pulsan 1S3 Y 1S4 al mismo tiempo queda garantizado que el ciclo no se iniciará puesto que el pulsador de paro 1S4 envía la señal al pilotaje 14 de 1V2 que es el preferencial.
- 12. Reductor de presión Otra forma de anular los efectos de la señal permanente es con un reductor de presión. En este caso la válvula principal o de potencia puede ser de pilotajes con accionamiento neumático normal. En la figura se indica la conexión de un reductor de presión al pilotaje 14 de una válvula biestable con accionamiento neumático normal. En este caso el pilotaje 12 correspondería a la señal que desea dominarse.
- 13. Método de Rodillo Abatible. Cuando una secuencia presenta problemas de sincronía una primera opción para resolverlo es por este método. Este método resuelve el problema de bloqueo en las válvulas que controlan los actuadores por medio de rodillo abatible. El rodillo abatible es un activador mecánico de las válvulas neumáticas. Su funcionamiento consiste en solo dar un pulso de presión de aire cuando la cabeza del actuador pasa por primera vez sobre este rodillo, un solo instante se activa esta válvula, para lograr esto la válvula tiene que recorrerse un poco antes del final de la carrera. Las siguientes imágenes muestran el funcionamiento de la válvula 3/2 activada por rodillo abatible cuando pasa la cabeza del vástago, donde se observa que solo se acciona una sola vez.