Representación 3D y proyecciones en diseño
•Descargar como DOCX, PDF•
1 recomendación•221 vistas

wEFDCXdffvgjasdyjgashkdgbaschkbjhasvxdhascjhvjhasvhkxsjgxk<jz

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Representación 3D y proyecciones en diseño
Similar a Representación 3D y proyecciones en diseño (20)
Representación 3D y proyecciones en diseño
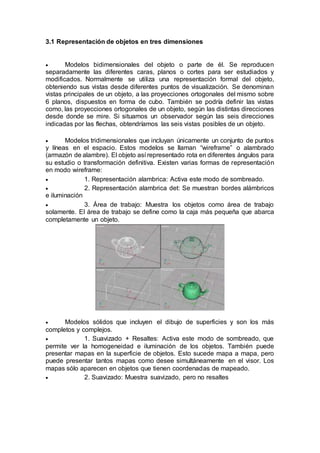
- 1. 3.1 Representación de objetos en tres dimensiones Modelos bidimensionales del objeto o parte de él. Se reproducen separadamente las diferentes caras, planos o cortes para ser estudiados y modificados. Normalmente se utiliza una representación formal del objeto, obteniendo sus vistas desde diferentes puntos de visualización. Se denominan vistas principales de un objeto, a las proyecciones ortogonales del mismo sobre 6 planos, dispuestos en forma de cubo. También se podría definir las vistas como, las proyecciones ortogonales de un objeto, según las distintas direcciones desde donde se mire. Si situamos un observador según las seis direcciones indicadas por las flechas, obtendríamos las seis vistas posibles de un objeto. Modelos tridimensionales que incluyan únicamente un conjunto de puntos y líneas en el espacio. Estos modelos se llaman “wireframe” o alambrado (armazón de alambre). El objeto así representado rota en diferentes ángulos para su estudio o transformación definitiva. Existen varias formas de representación en modo wireframe: 1. Representación alambrica: Activa este modo de sombreado. 2. Representación alambrica det: Se muestran bordes alámbricos e iluminación 3. Área de trabajo: Muestra los objetos como área de trabajo solamente. El área de trabajo se define como la caja más pequeña que abarca completamente un objeto. Modelos sólidos que incluyen el dibujo de superficies y son los más completos y complejos. 1. Suavizado + Resaltes: Activa este modo de sombreado, que permite ver la homogeneidad e iluminación de los objetos. También puede presentar mapas en la superficie de objetos. Esto sucede mapa a mapa, pero puede presentar tantos mapas como desee simultáneamente en el visor. Los mapas sólo aparecen en objetos que tienen coordenadas de mapeado. 2. Suavizado: Muestra suavizado, pero no resaltes
- 2. Espacio tridimensional El espacio3D es un espaciomatemático virtual creado por el programa de diseño 3D. Este espacio está definido por un sistema cartesiano de tres ejes: X, Y, Z. El punto donde salen las líneas virtuales que definen los ejes se llama origen y sus coordenadas son (0, 0, 0). En este espaciovirtual se crean, modifican y disponen los diferentes objetos tridimensionales que van a componer la escena. Fundamentos básicos del modelado en 3D El 3D es una mera representación de coordenadas, que conforman estructuras envueltas por una textura. Por tanto, primero se deben construir un modelo, para ello hay técnicas de modelado comunes, en las cuales se encuentran: 1. Estructuras Predefinidas: Aquellas estructuras ya armadas por el sistema. Existen tres tipos: a). Primitivas: caja, cono, esfera, geo esfera, cilindro, tubo, anillo, pirámide, tetera y plano. b). Primitivas Extendidas: hedra, nudo toroide, caja "redondeada", cilindro "redondeado", tanque de aceite, capsula, sprindle, forma L, gengon, forma c, anillo ondulado, hose, prisma. c). Librerías: son formas armadas, disponibles en 3d Max 7; puertas, ventanas, árboles, escaleras. 2. Box Modeling: Como su nombre lo indica, es el modelado de figuras complejas a través de una caja. 3. NURBS Modeling: Es una técnica para construir mallas de alta complejidad, de aspecto orgánico ó curvado, que emplea como punto de partida splines (figuras 2d) para mediante diversos métodos, crear la malla 3d anidando los splines.
- 3. Renderizado El renderizado es un proceso de cálculo complejo desarrollado por un ordenador destinado a generar una imagen 2D a partir de una escena 3D. Así podría decirse que en el proceso de renderización, la computadora "interpreta" la escena 3D y la plasma en una imagen 2D. Cuando se trabaja en un programa de diseño 3D por computadora, no es posible visualizar en tiempo real el acabado final deseado de una escena 3D compleja ya que esto requiere una potencia de cálculo demasiado elevada. Por lo que se opta por crear el entorno 3D con una forma de visualización más simple y técnica y luego generar el lento proceso de renderización para conseguir los esultados finales deseados. Proyecciones En dos dimensiones, las operaciones de visión transfieren puntos bidimensionales en el plano coordenado mundial a puntos bidimensionales en el plano de coordenadas del dispositivo. Las definiciones de objetos, sujetados contra el marco de una ventana, se delinean en un puerto de visión (viewport). Estas coordenadas de dispositivo normalizadas se convierten después en coordenadas de dispositivo y el objeto se despliega en el dispositivo de salida. En tres dimensiones, la situación es un poco más complicada, ya que ahora tenemos algunas alternativas como la forma en que se van a generar las vistas. Podríamos visualizar una escena desde el frente, desde arriba o bien desde atrás. También podríamos generar una vista de lo que observaríamos si estuviéramos parados en medio de un grupo de objetos. Además, las descripciones tridimensionales de objetos deben proyectarse en la superficie de visión plana del dispositivo de salida. La visualización en nuestro caso significa información del mundo real en la pantalla. La visualización 2D son las operaciones de transferencia de puntos bidimensionales en el plano coordenado del mundo en el plano coordenado del dispositivo. Existen dos métodos básicos para proyectar objetos tridimensionales sobre una superficie de visión bidimensional. Estas dos maneras, dependen de si todos los puntos del objeto pueden proyectarse sobre la superficie a lo largo de líneas paralelas o bien los puntos pueden proyectarse a lo largo de líneas que convergen a una posición denominada centro de proyección. En ambos casos, la intersección de una línea de proyección con la superficie de visión determina las coordenadas del punto proyectado sobre este plano de proyección.
- 4. Proyecciones 3.2 Visualización de objetos La representación tridimensional es conveniente cuando la visualización de una tercera magnitud, típicamente la elevación del terreno, resulta útil para la interpretación de los datos que se quieren mostrar. Se presentan a continuación algunos de los usos más comunes. PROYECCIONES Existen dos métodos básicos para proyectar objetos tridimensionales sobre una superficie de visión bidimensional. Todos los puntos del objeto pueden proyectarse sobre la superficie a lo largo de líneas paralelas o bien los puntos pueden proyectarse a lo largo de las líneas que convergen hacia una posición denominada centro de proyección. Los dos métodos llamados proyección en paralelo y proyección en perspectiva, respectivamente, se ilustran. En ambos casos, la intersección de una línea de proyección con la superficie de visión determinada las coordenadas del punto proyectado sobre este plano de proyección. Por ahora, se supone que el plano de proyección de visión es el plano z = 0 de un sistema de coordenadas del izquierdo.
- 5. PROYECCIÓN EN PARALELO Una proyección en paralelo preserva dimensionar relativas de los objetos y esta es la técnica que se utiliza en dibujo mecánico para producir trazos a escala de los objetos en las dimensiones. Este método sirve para obtener vistas exactas de varios lados de un objeto, pero una proyección en paralelo no ofrece una presentación realista del aspecto de un objeto tridimensional. Las vistas formadas con proyecciones en paralelo se pueden caracterizar de acuerdo con el angulo que la dirección de proyección forma con el plano de proyección. Cuando la dirección de proyección es perpendicular al plano de proyección, se tiene una proyección ortogonal.Una proyección que no es perpendicular al plano se denomina proyección oblicua. PROYECCIÓN ORTOGONAL La Proyección ortogonal es aquella cuyas rectas proyectantes auxiliares son perpendiculares al plano de proyección (o a la recta de proyección), estableciéndose una relación entre todos los puntos del elemento proyectante con los proyectados. Existen diferentes tipos: Vista A: Vista frontal o alzado Vista B: Vista superior o planta Vista C: Vista derecha o lateral derecha Vista D: Vista izquierda o lateral izquierda Vista E: Vista inferior
- 6. Vista F: Vista posterior Las ecuaciones de transformación parea efectuar una proyección paralela ortogonal son directas.Para cualquier punto (x, y, z), el punto de proyección (Xp, Yp, Zp) sobre la superficie de visión se obtiene como Xp=X, Yp=y, Xp=0. PROYECCIÓN OBLICUA. Es aquella cuyas rectas proyectantes auxiliares son oblicuas al plano de proyección, estableciéndose una relación entre todos los puntos del elemento proyectante con los proyectados. Una proyección Oblicua se obtiene proyectando puntos a lo largo de líneas paralelas que no son perpendiculares al plano de proyección. La figura muestra una proyección oblicua de un punto (x, y, z) por una línea de proyección a la posición (xp, Yp).
- 7. PROYECCIONES PERSPECTIVA Para obtener una proyección en perspectiva de un objeto tridimensional, se proyectan puntos a lo largo de líneas de proyección se interceptan en el de centro de proyección. En el centro de proyección está en el eje z negativo a una distancia d detrás del plano de proyección. Puede seleccionarse cualquier posición para el centro de proyección, pero la elección de una posición a lo largo del eje z simplifica los cálculos en las ecuaciones de transformación. Podemos obtener las ecuaciones de transformaciones de una proyección en perspectiva a partir de las ecuaciones paramétricas que describen la línea de proyección de esta línea. X’ = x –xu Y’ = y- yu Z’ = z-(z + d) u El parámetro u toma los valores de 0 a 1 y las coordenadas (x’, y’, z’) representan cualquier posición situada a lo largo de la línea de proyección. Cuando u = 0. Las ecuaciones producen el punto P en las coordenadas (x, y, z). En el otro extremo de la línea u = 1 y se tienen las coordenadas del centro de proyección, (0, 0,-d). Para obtener las coordenadas en el plano de proyección. Se hace z’ = 0 y se resuelven para determinar el parámetro u: Este valor del parámetro u produce la interacción de la línea de proyección con el plano de proyección en (xp, yp, 0). Al sustituir las ecuaciones, se obtienen las ecuaciones de transformación de perspectiva. Mediante una representación en coordenadas homogéneas tridimensionales, podemos escribir la transformación de la perspectiva en forma matricial.
- 8. Las coordenadas de proyección en el plano de proyección se calculan a partir de las coordenadas homogéneas como: [xp yp zp 1] = [xh/w yh/w zh/w 1] Cuando un objeto tridimensional se proyecta sobre un plano mediante ecuaciones de transformaciones de perspectiva, cualquier conjunto de líneas paralelas del objeto que no sean paralelas al plano se proyectan en líneas convergentes. 3.3 Transformaciones tridimensionales
- 9. El escalado, la traslación y la rotación son transformaciones lineales, ya que los nuevos puntos se calculan a partir de combinaciones lineales de las componentes de los puntos originales. Se define TRANSFORMACIÓN AFÍN a una combinación de transformaciones lineales aplicadas a un objeto. Cada transformación vendrá representada por una sola matriz, que se obtendrá multiplicando las matrices de cada una de las transformaciones, y en el mismo orden en el que queremos que se apliquen. Una escena 3D se define por los puntos, planos y líneas que lo componen. Como son 3 dimensiones, se necesita un tercer eje, siendo estos el eje X, Y y Z. El sentido de estos queda definido por la regla de la mano derecha. La regla de la mano derecha determina la dirección positiva del eje Z cuando se conoce la dirección de los ejes X y Y en un sistema de coordenadas 3D. Cualquier punto se describe entonces como una terna de valores (x, y, z)
- 10. Las transformaciones 3D son extensiones de las transformaciones en dos dimensiones, por tanto, en 3-D, aplicando la misma regla, habrá que pasar a matrices 4x4
- 17. 3.4 Lineas y superficies curvas Las ecuaciones de los objetos con límites curvos se pueden expresar en forma paramétrica o en forma no paramétrica. El Apéndice A proporciona un resumen y una comparación de las representaciones paramétricas y no paramétricas. Entre los múltiples objetos son útiles a menudo en las aplicaciones gráficas se pueden incluir las superficies cuadráticas, las supercuádricas, las funciones polinómicas y exponenciales, y las superficies mediante splines. Estas descripciones de objetos de entrada se teselan habitualmente para producir aproximaciones de las superficies con mallas de polígonos.
- 18. La necesidad de representar curvas y superficies proviene de modelar objetos “from scratch” o representar objetos reales. En este último caso, normalmente no existe un modelo matemático previo del objeto, y el objeto se aproxima con “pedazos” de planos, esferas y otras formas simples de modelar, requiriéndose que los puntos del modelo sean cercanos a los correspondientes puntos del objeto real. La representación no paramétrica de una curva (por ejemplo, en dos dimensiones) puede ser implícita, y = f(x) O bien explícita, f(x, y) = 0 La forma implícita no puede ser representada con curvas multivaluadas sobre x (por ejemplo, un círculo), mientras que la forma explícita puede requerir utilizar criterios adicionales para especificar la curva cuando la ecuación tiene más soluciones de las deseadas. Representación paramétrica. Una representación paramétrica (por ejemplo, de una curva bidimensional) tiene la forma P(t) = ( x(t), y(t) )T t1 <= t <= t2 La derivada o vector tangente es P’ (t) = ( x’(t), y’(t) )T El parámetro t puede reemplazarse mediante operaciones de cambio de variable, y frecuente se normaliza de modo que t1 = 0 y t2 = 1. Aunque geométricamente la curva aparece equivalente, una operación de este tipo normalmente modifica el comportamiento de la curva (esto es visible al comparar sus derivadas).