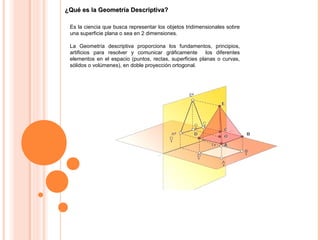
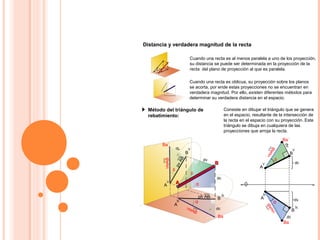
Este documento explica los conceptos básicos de la geometría descriptiva, incluyendo las definiciones de proyección, sistema de proyección, tipos de proyecciones y sistemas de representación. En particular, se describe el sistema diédrico de representación, el cual utiliza dos planos de proyección ortogonales para representar objetos tridimensionales.