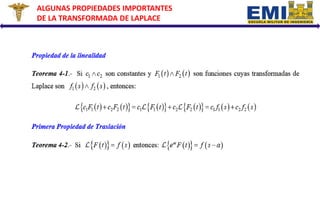
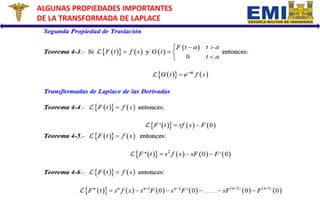
El documento explica la transformada de Laplace, incluyendo su definición, notación, propiedades y aplicaciones a ecuaciones diferenciales. La transformada de Laplace convierte funciones del dominio del tiempo al dominio complejo, lo que permite resolver ecuaciones diferenciales lineales. El documento también cubre la transformada inversa de Laplace y ejemplos numéricos.
















































![Interpolación lagrange[1]](https://cdn.slidesharecdn.com/ss_thumbnails/interpolacin-lagrange1-131220172359-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






















































