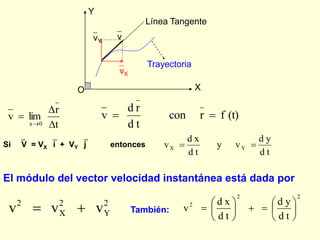
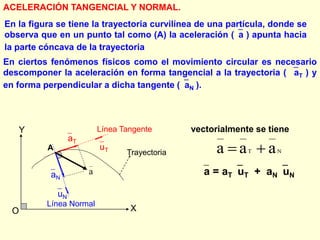
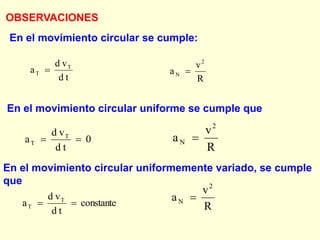
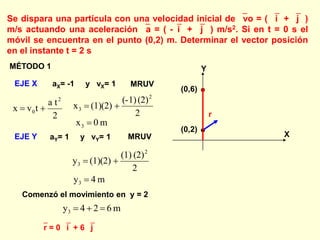
El documento aborda el concepto de movimiento curvilíneo, describiendo aspectos como los vectores de posición, desplazamiento, velocidad media e instantánea, y aceleración. Se incluyen ejemplos de cómo calcular estos vectores y sus derivadas a partir de ecuaciones que definen la trayectoria de partículas en movimiento. También se exploran movimientos compuestos y el movimiento parabólico, resaltando la independencia de los movimientos y sus componentes.