1. El documento describe los conceptos básicos de la cinemática, incluyendo el movimiento, trayectorias, magnitudes escalares y vectoriales.
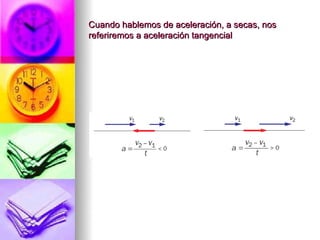
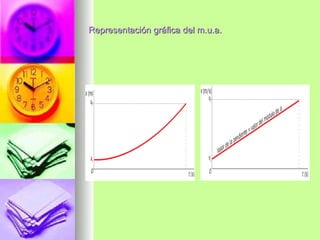
2. Explica los tipos de movimiento como rectilíneo, curvilíneo y sus variaciones. También define la velocidad, rapidez, aceleración y movimientos uniforme y uniformemente acelerado.
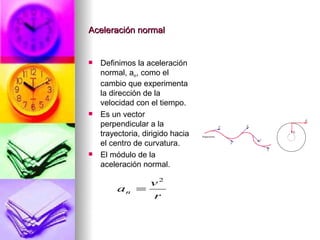
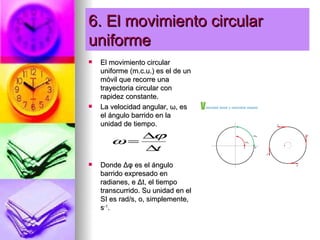
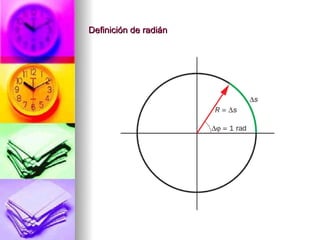
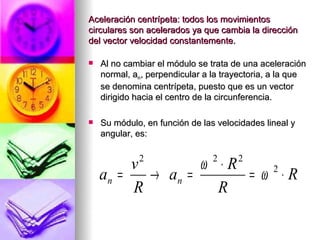
3. Finalmente, analiza el movimiento circular uniforme, definiendo la velocidad angular, radián y aceleración centrípeta.