Descargado 12 veces



![Para el desplazamiento se coloca un 1 en D/C’ de esta manera se consigue que nunca se activan las
entradas ni PR ni CL, ya que de las puertasNAND siempre saldrá un 1. El desplazamiento se realiza
como en un registro serie-serie.
A continuación se muestra un registro con carga paralelo y salida serie pero en este caso la carga es
síncrono, ya que se carga por las entradas síncronas
Observamos que esto se consigue con un multiplexor de dos canales gobernado por
DESPLAZAMIENTO/ CARGA’. Con esto se consigue que si se quiere cargar los datos, se activan las
entradas en paralelo que van cada una a las entradas S R. Para obtener los datos se tiene que
realizar la entrada serie.
En conclusión, podemos observar que la función del multiplexor es elegir entre la carga en serie o
en paralelo
Registro de entrada y salida en paralelo (PIPO)[editar]](https://image.slidesharecdn.com/contadorasncronobinario-141113175315-conversion-gate02/85/Contador-asincrono-binario-7-320.jpg)


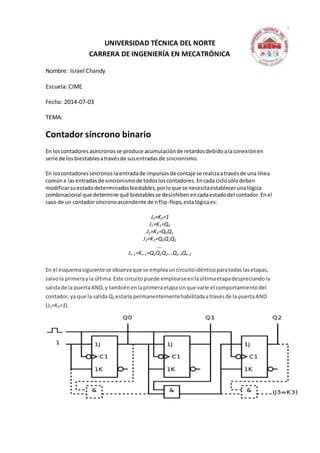
El documento describe diferentes tipos de contadores síncronos y registros de desplazamiento. Explica cómo funcionan los contadores síncronos binarios ascendentes y descendentes utilizando lógica combinacional para determinar qué biestables cambian en cada estado. También describe contadores ascendentes/descendentes que pueden contar en ambas direcciones y cómo implementarlos. Finalmente, explica diferentes tipos de registros de desplazamiento como serie-paralelo, paralelo-serie y sus usos.














































































