Ejercicio 4 Respuesta en frecuencia
•Descargar como DOCX, PDF•
0 recomendaciones•724 vistas

Este documento describe el proceso de diseño de control de un sistema de retroalimentación unitaria usando el método de respuesta por frecuencia. Se calcula la ganancia de control inicial K=65 y se mejora a K=374.036 usando el diagrama de Bode. Luego, se aplica un compensador de ganancia Kv=20.6070 para mejorar el margen de fase a 142.26 grados y la frecuencia de corte a 4.16 rad/seg. Finalmente, se calcula la nueva ganancia K=1872 y se verifica el diseño usando diagramas de B

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Ejercicio 4 Respuesta en frecuencia
Similar a Ejercicio 4 Respuesta en frecuencia (20)
Ejercicio 4 Respuesta en frecuencia
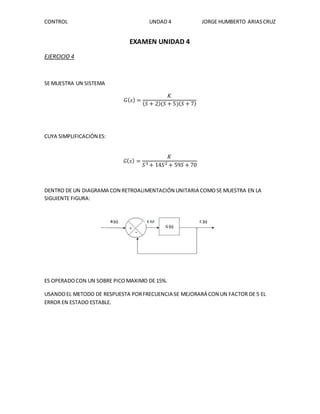
- 1. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ EXAMEN UNIDAD 4 EJERCICIO 4 SE MUESTRA UN SISTEMA 퐺(푠) = 퐾 (푆 + 2)(푆 + 5)(푆 + 7) CUYA SIMPLIFICACIÓN ES: 퐺(푠) = 퐾 푆3 + 14푆2 + 59푆 + 70 DENTRO DE UN DIAGRAMA CON RETROALIMENTACIÓN UNITARIA COMO SE MUESTRA EN LA SIGUIENTE FIGURA: ES OPERADO CON UN SOBRE PICO MAXIMO DE 15%. USANDO EL METODO DE RESPUESTA POR FRECUENCIA SE MEJORARÁ CON UN FACTOR DE 5 EL ERROR EN ESTADO ESTABLE.
- 2. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ DESARROLLO: 1.- proponemos una ganancia K aleatoria para empezar a calcular nuestro margen de ganancia, la K propuesta es de 65 K=180 퐺(푠) = 65 푆3 + 14푆2 + 59푆 + 70 Aplicamos diagrama de bode sobre función de transferencia y nos arroja el siguiente gráfico:
- 3. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ Se procede a calcular la constante de amortiguamiento 휉 y wm: 휉= −ln( %푠 ) 100 √휋2+ln(%푠 100 ) = −ln(15%) %15 100 √휋2 + ln ( ) = 0.5170 푤푚 = 푡푎푛−1 ( 2푐 √−2푐2 + √1 + 4푐 4 ) 푤푚 = 푡푎푛−1 ( 2 ∗ 0.5170 √−2 ∗ 0.51702 + √1 + 4 ∗ 0.5170 4 ) = 37.74° Calculamos el margen de fase= -180+37.74=142.26 Primero buscamos en nuestra gráfica el valor de -142° en la grafica de fase: (error en resolución de cursor, usé el valor más cercano a 180) Como paso siguiente debemos buscar, en la gráfica de magnitud la frecuencia que nos salio de 4.16 y seleccionamos la magnitud resultante.
- 4. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ La wm resultante que nos salio es: Wm=15.2 Los cuales son la ganancia requerida de nuestro sistema. Primero debemos calcular la magnitud, como sabemos, para calcular los db debemos tener un valor de magnitud, de la formula de los db: 푑퐵 = 20푙표푔10|푚| Despejando a M de nuestra función original tenemos que: 푚 = 10 (푤푚 20 ) Calculando: 푚 = 10 (15.2 20 ) m=5.7543 Procedemos a calcular nuestra nueva K. Tenemos que multiplicar el valor de la magnitud(m) junto con el valor de la k aleatoria ingresada en los pasos anteriores(es decir, 65). K=m*k_aleatoria K=5.7543*65 K=5.7543*65=374.036 Nuestra nueva k es de 374.036
- 5. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ Procedemos a analizar nuestra nueva k con la función de transferencia realizando la retroalimentación y excitándola a un estímulo escalón(1/s). 퐺(푠) = 374.036 푆3 + 14푆2 + 59푆 + 70 Aplicando retroalimentación: Excitándola con un estímulo escalón:
- 6. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ Procedemos a calcular KV Kv se obtiene al graficar el diagrama de bode la función y usando el valor de magnitud máximo dentro de la gráfica de magnitudes. Kv=10^(14.6/20) Kv= 4.1215 Kv=4.1215*5 Kv=20.6070 K= 374.4*5=1872 USANDO LA NUEVA K CALCULAMOS DIAGRAMAS DE BODE
- 7. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ WM=37.74 -180+37.74=-142.26°
- 8. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ Wc= 4.16rad/seg
- 9. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ MULTIPLICANDO FUNCION CON EL COMPENSADOR Aplicando RLOCUS:
- 10. CONTROL UNDAD 4 JORGE HUMBERTO ARIAS CRUZ CODIGO USADO >> g=tf([1],[1 14 59 70]) >> g=tf([65],[1 14 59 70]) >> margin(g) >> bode(g) >> g=tf([374.36],[1 14 59 70]) >> t=feedback(g,1) >> step(t) >> margin(g) >> g=tf([1872],[1 14 59 70]) >> margin(g) >> nyquist(g) >> gc=tf([0.0067 0.295],[1 0.295]) >> G=gc*g >> rlocus(G)