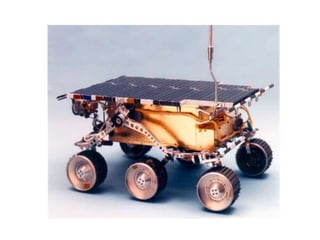
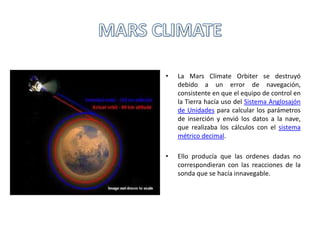
El documento describe el robot Sojourner, el primer vehículo robótico en Marte. Sojourner pesaba 11 kg y tenía seis ruedas que le permitían moverse a 0.6 m/min. También describe la Mars Climate Orbiter, una sonda de la NASA cuyo objetivo era estudiar el clima de Marte pero que se destruyó debido a un error en las unidades de medida entre el equipo de control en la Tierra y la sonda.