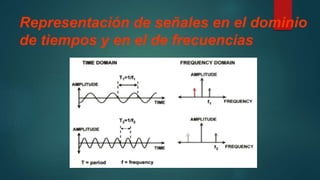
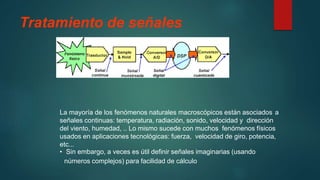
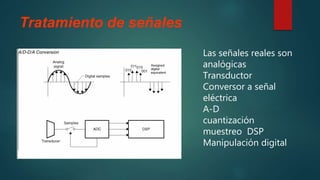
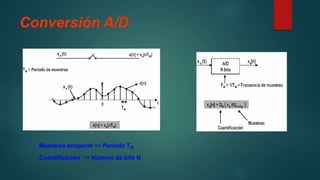
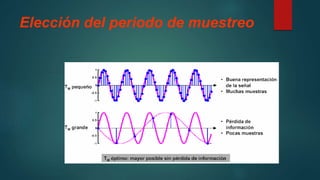
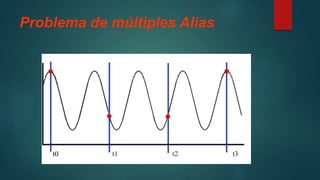
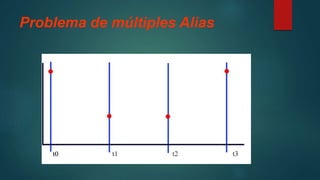
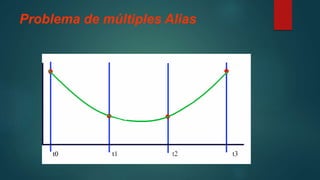
Este documento presenta una introducción al procesamiento digital de señales (DSP). Explica conceptos clave como la conversión analógico-digital, el muestreo y el aliasing. También resume brevemente la historia del DSP y describe las ventajas del procesamiento digital sobre el analógico. Finalmente, introduce conceptos matemáticos fundamentales como la transformada de Fourier y diferentes representaciones de señales en el dominio del tiempo y de las frecuencias.
































![Digital Signal Processing [DSP]](https://cdn.slidesharecdn.com/ss_thumbnails/digitalsignalprocessingdsp-091225003508-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






![Unidad i digitales[1]](https://cdn.slidesharecdn.com/ss_thumbnails/unidadidigitales1-120809220042-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


















