Descargar como PDF, PPTX
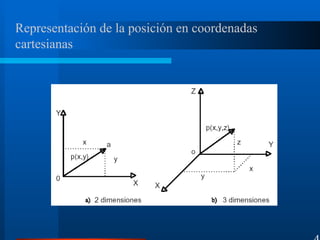
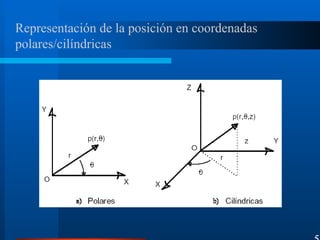
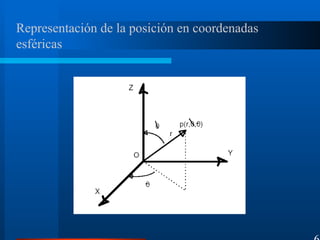

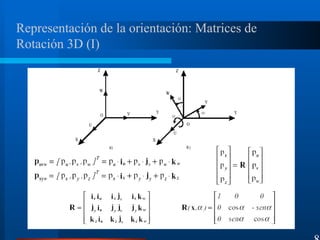
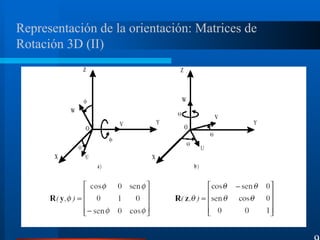
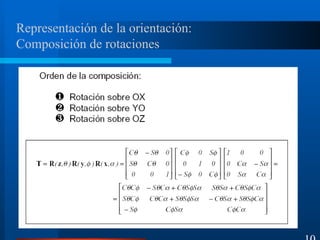
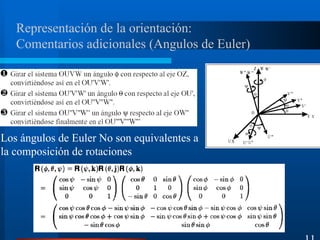
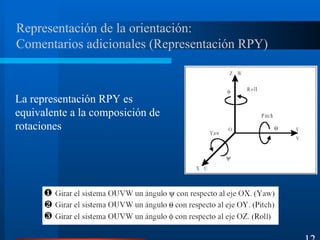
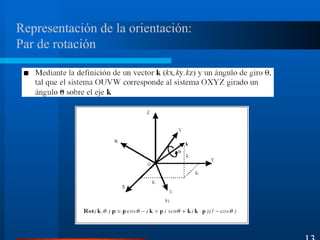
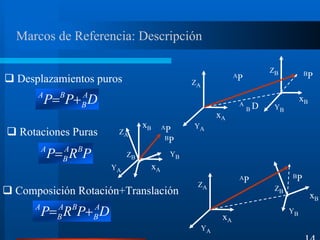
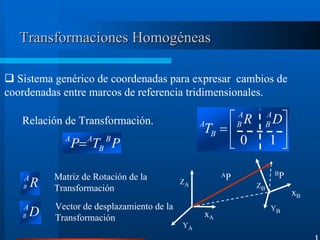
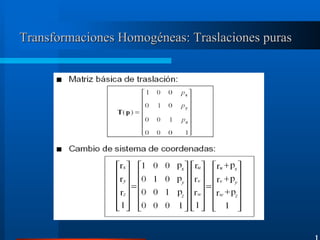
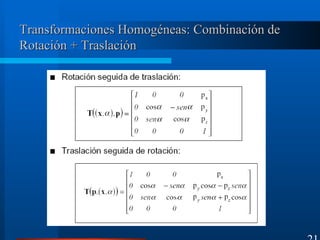
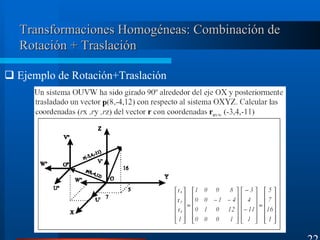
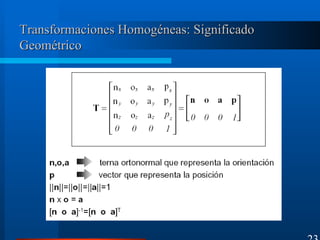
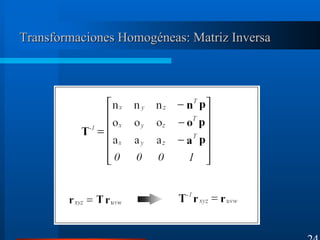
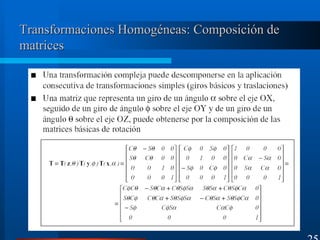
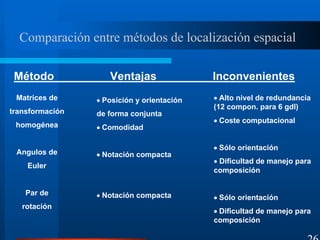

El documento describe diferentes métodos para representar la posición y orientación de objetos en el espacio, incluyendo coordenadas cartesianas, polares y esféricas. También cubre la representación de la orientación a través de matrices de rotación 2D y 3D, ángulos de Euler, y par de rotación. Finalmente, introduce las matrices de transformación homogénea como un sistema genérico para expresar cambios de coordenadas entre marcos de referencia tridimensionales.





















































