Descargado 195 veces

![MODULACIÓN DELTA m(n) = m(nT s ) ; n = 0, ±1, ±2,… T s : Período de muestra m(nT s ): Muestra de la señal m(t) en t= nT s Set de relaciones discretas en el tiempo e[n]: Señal de error, representa la diferencia entre la señal muestreada m[n] y la última aproximación m q [n-1] e q [n]: Versión cuantificada de e[n] Sgn: Función signo](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-6-2048.jpg)
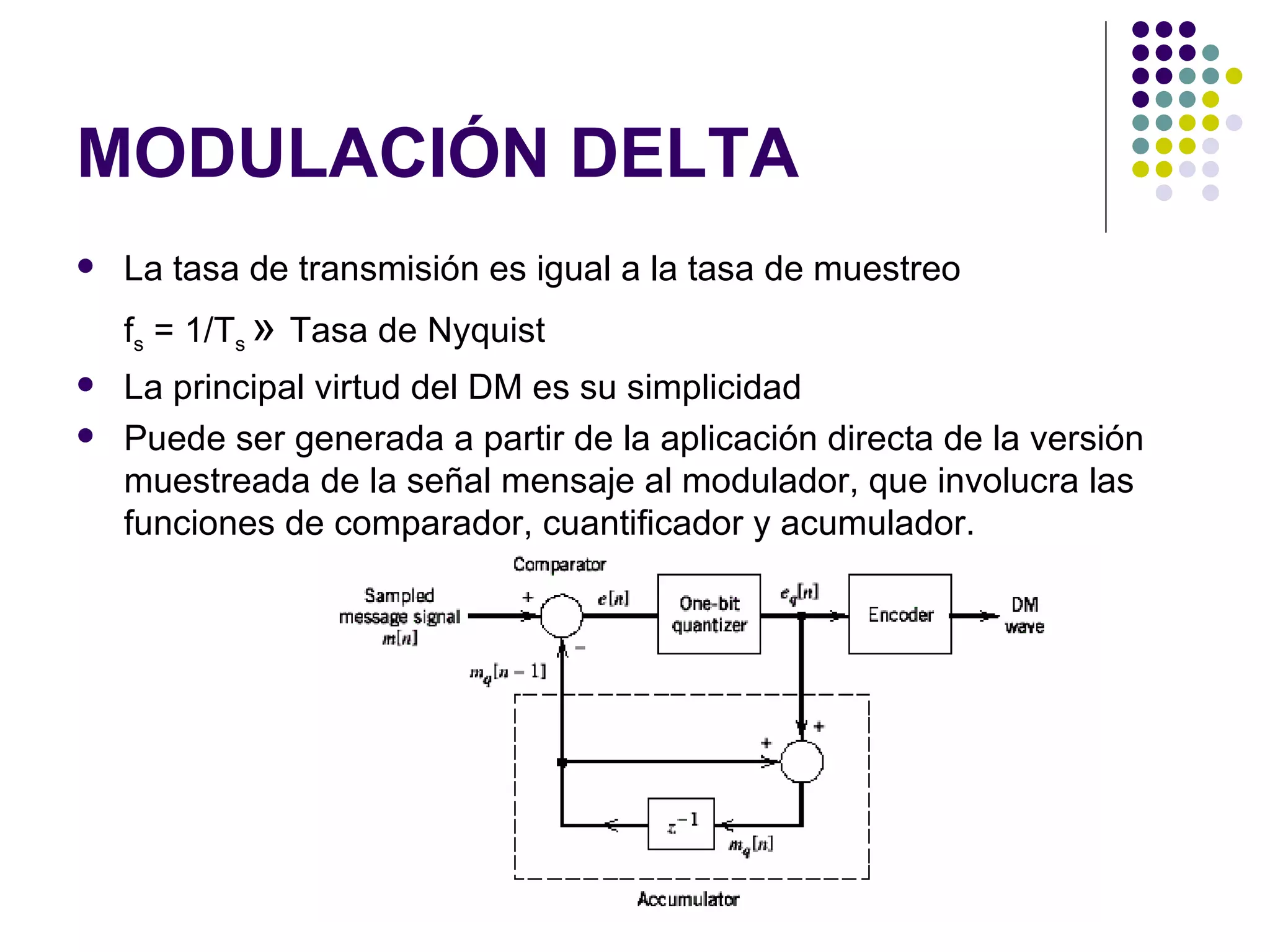
![MODULACIÓN DELTA Comparador: Computa la diferencia entre las dos entradas separadas en el tiempo T s . Cuantificador: Es un limitador simple con relación de 1 sólo escalón de entrada / salida, afectado por la función signo. Acumulador: Produce el siguiente resultado En el instante de muestreo (nT s ), el acumulador incrementa en un salto positivo ó negativo, dependiendo del signo algebraico de e[n], función de error. Si la muestra de entrada m[n] es mayor que la última aproximación m q [n], se aplica un incremento positivo y visceversa](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-8-2048.jpg)
![MODULACIÓN DELTA Z -1 : unidad de retardo de 1 período T s Receptor Delta La escalera aproximada m q [n], es reconstruída, pasando la secuencia de pulsos producidos a la salida del decodificador a través de un acumulador, se manera similar al utilizado en el Tx.](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-9-2048.jpg)
![DISTORSIÓN POR SOBRECARGA DE PENDIENTE Del diagrama en bloques del transmisor Si q[n] es el error de cuantificación La entrada al cuantificador es Excepto por el error de cuantificación q[n-1], la entrada del cuantificador es diferencia de 1er orden de la señal de entrada, puede ser vista como una aproximación digital de la derivada de la señal de entrada.](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-11-2048.jpg)
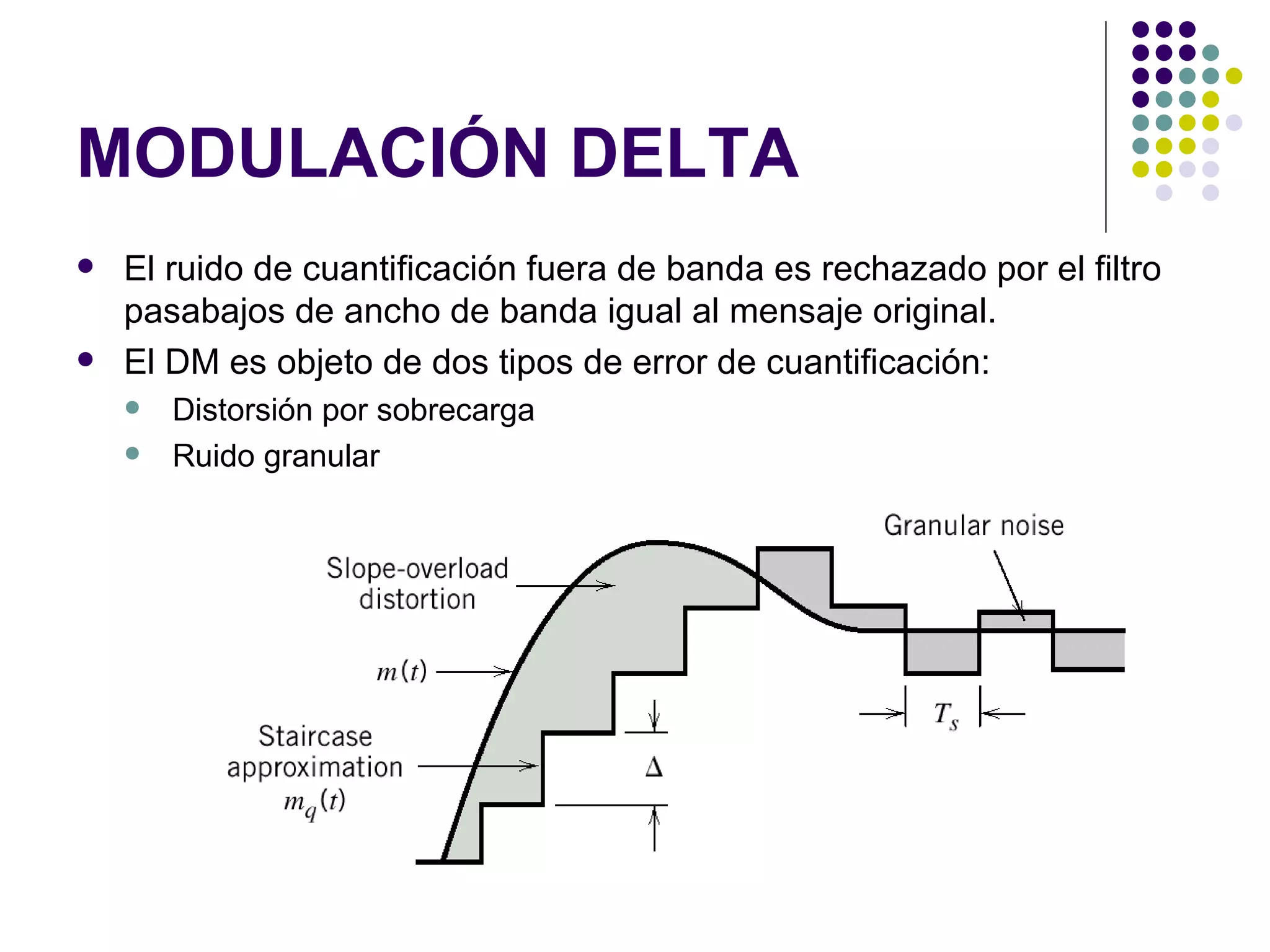
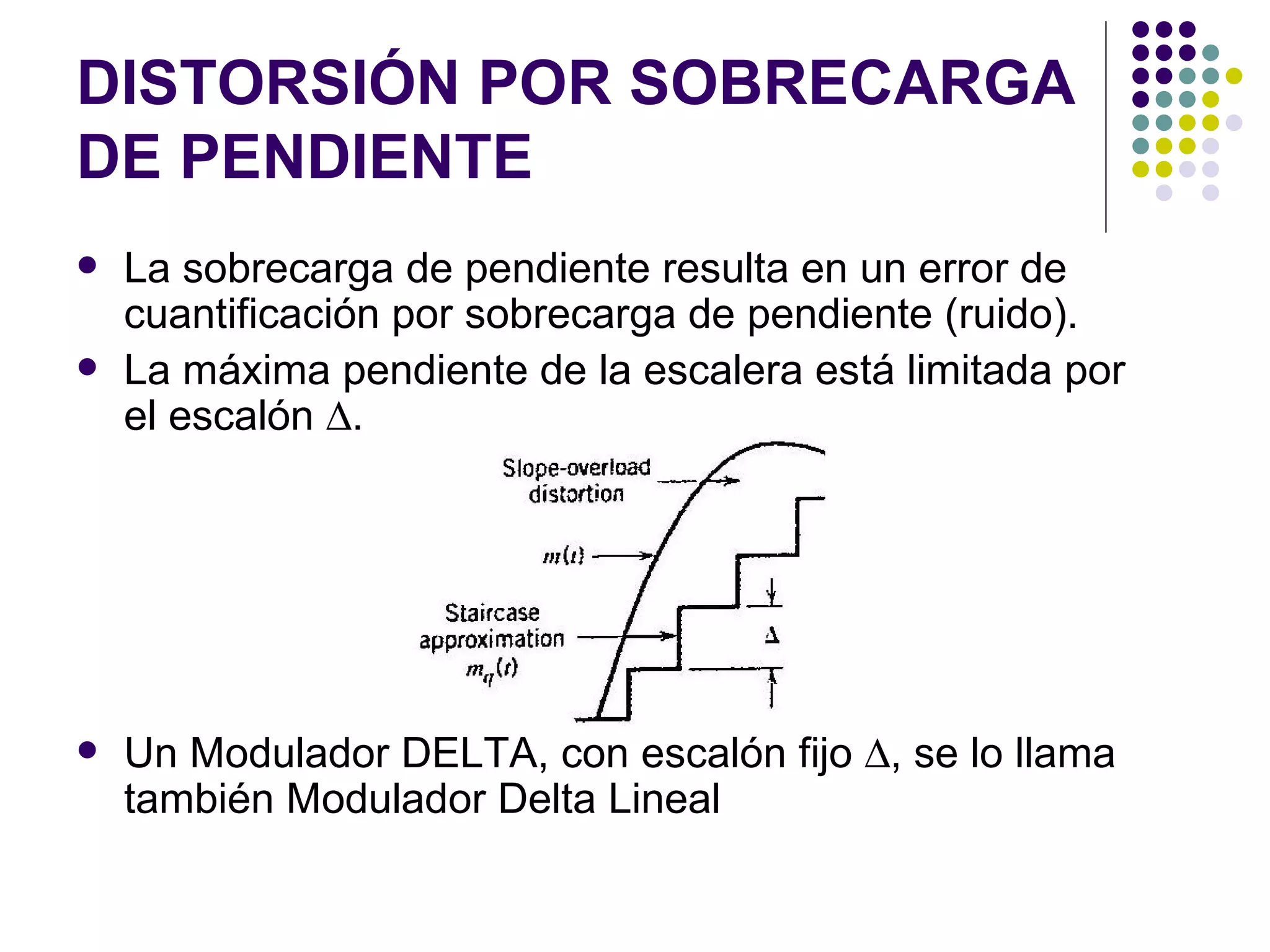
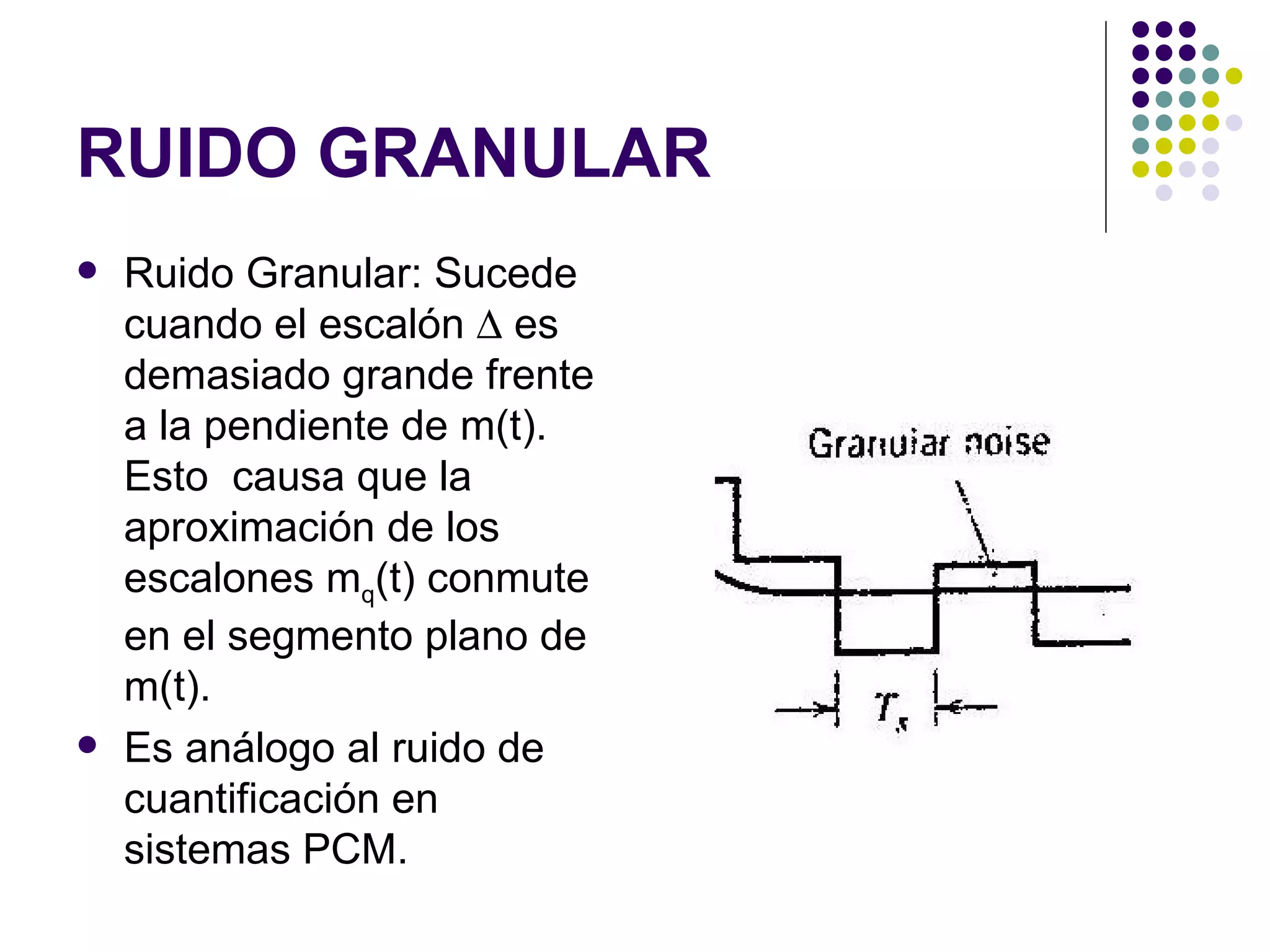
![DISTORSIÓN POR SOBRECARGA DE PENDIENTE Si consideramos la pendiente máxima de la señal de entrada m(t), la secuencia de muestras m q [n], deberá incrementarse de manera de aumentar la rapidez de la secuencia de muestras m[n] en la región de máxima pendiente de m(t). Para que esto se cumpla, la condición para no tener sobrecarga de pendiente: Podríamos encontrar que el salto es tan pequeño que la aproximación en escalera m q [n], resulta insuficiente para seguir a la señal de entrada m(t) Esto se denomina SOBRECARGA DE PENDIENTE](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-12-2048.jpg)
![MODULACIÓN PCM DIFERENCIAL Removiendo dicha redundancia antes de la codificación, se obtiene una señal codificada, llamada DPCM. Supongamos que una señal m(t) se muestrea a f s = 1/T s para producir una secuencia {m[n]} cuyas muestras están separadas T s [seg.] La señal de entrada al cuantificador queda definida por e[n]: Error de predicción m[n]: Muestra de la señal de entrada m(t) m[n]: Muestra cuantificada de la señal de entrada, desplazada en T s](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-20-2048.jpg)
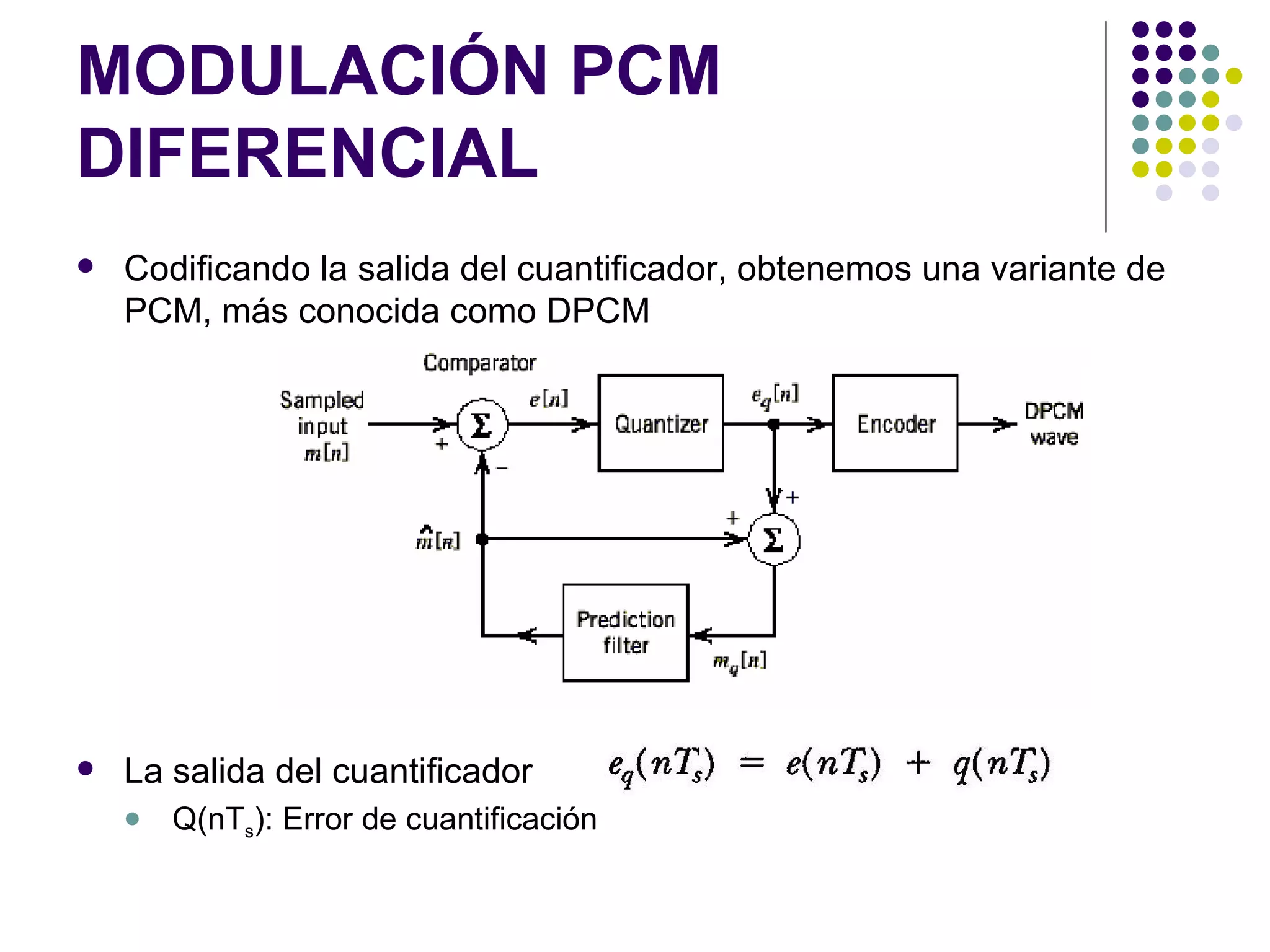
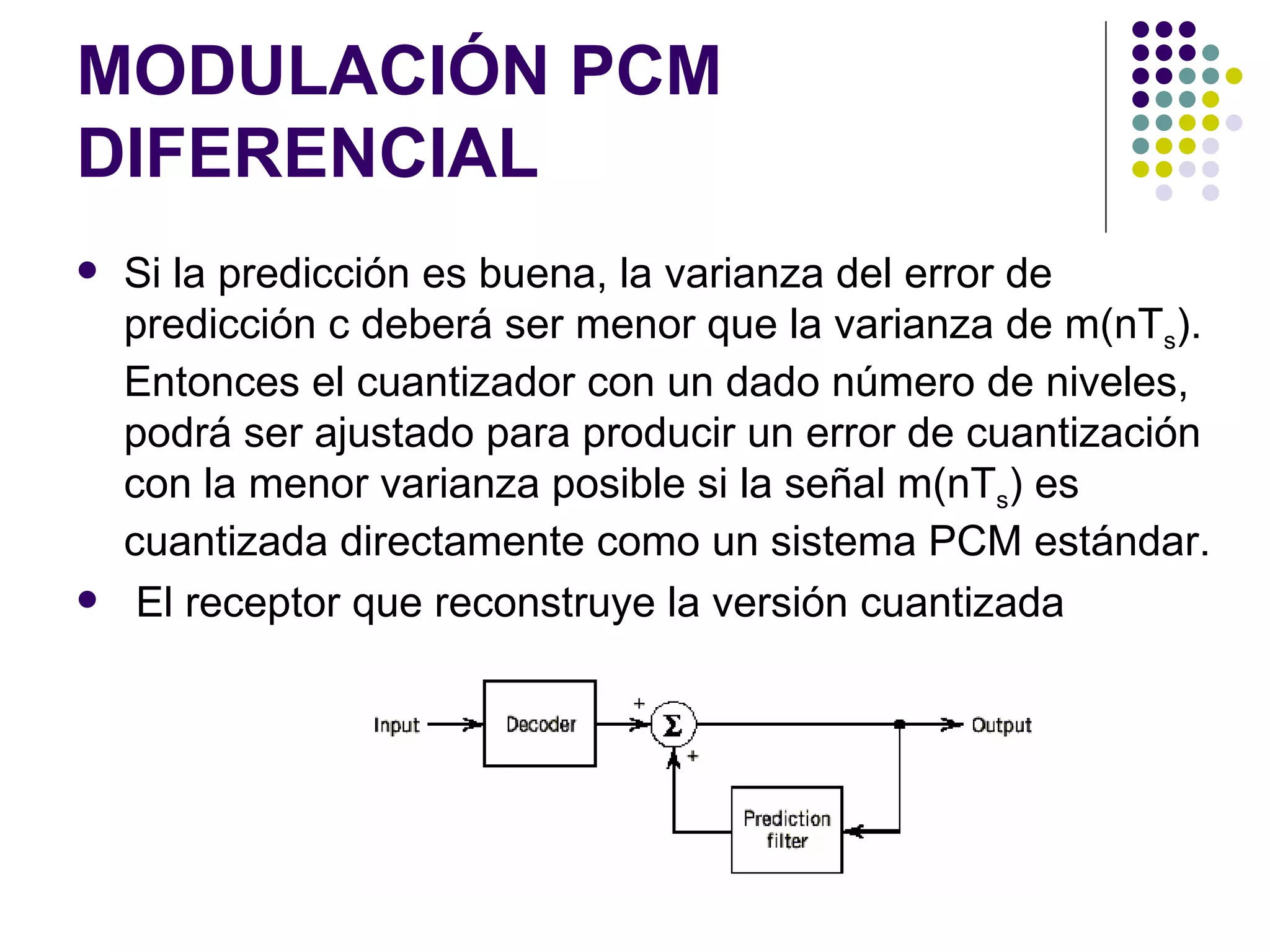
![MODULACIÓN PCM DIFERENCIAL La salida del cuantificador e q [n] se suma al valor predictivo m[n] que produce la entrada al filtro de predicción Donde m q [nT s ] representa la versión cuantizada de la señal de entrada m(nT s ) Independientemente del filtro de predicción, la señal cuantizada m q [nT s ] a la entrada del filtro de predicción, difiere de la señal de entrada m(nT s ) en el error de cuantización q(nT s )](https://image.slidesharecdn.com/modulacindelta-110321224248-phpapp02/75/Modulacion-delta-22-2048.jpg)

El documento describe los principios básicos de la modulación delta y sigma-delta. La modulación delta sobremuestrea la señal de entrada y aproxima la señal con una función escalera. La diferencia entre la entrada y la aproximación es cuantificada en dos niveles. La modulación sigma-delta integra la señal de entrada antes de la cuantificación, lo que mejora la performance al reducir la varianza de error y simplificar el receptor. Ambas técnicas están sujetas a distorsión por sobrecarga de pendiente y ruido granular.
Presentación de la Modulación Delta y su contexto en la comunicación eléctrica.
La Modulación Delta se sobre muestrea para simplificar cuantificación y mejorar correlación.
Cuantificación de diferencias entre la señal y su aproximación, destacando su sencillez y tasa de transmisión.
Descripción de los componentes como el comparador, cuantificador y acumulador en la modulación.
Impacto del ruido de cuantificación y los tipos de errores que afectan la Modulación Delta.
Discusión sobre la sobrecarga de pendiente y sus efectos en el error de cuantificación.
El ruido granular surge por escalones grandes, buscando un balance entre distorsión y ruido.
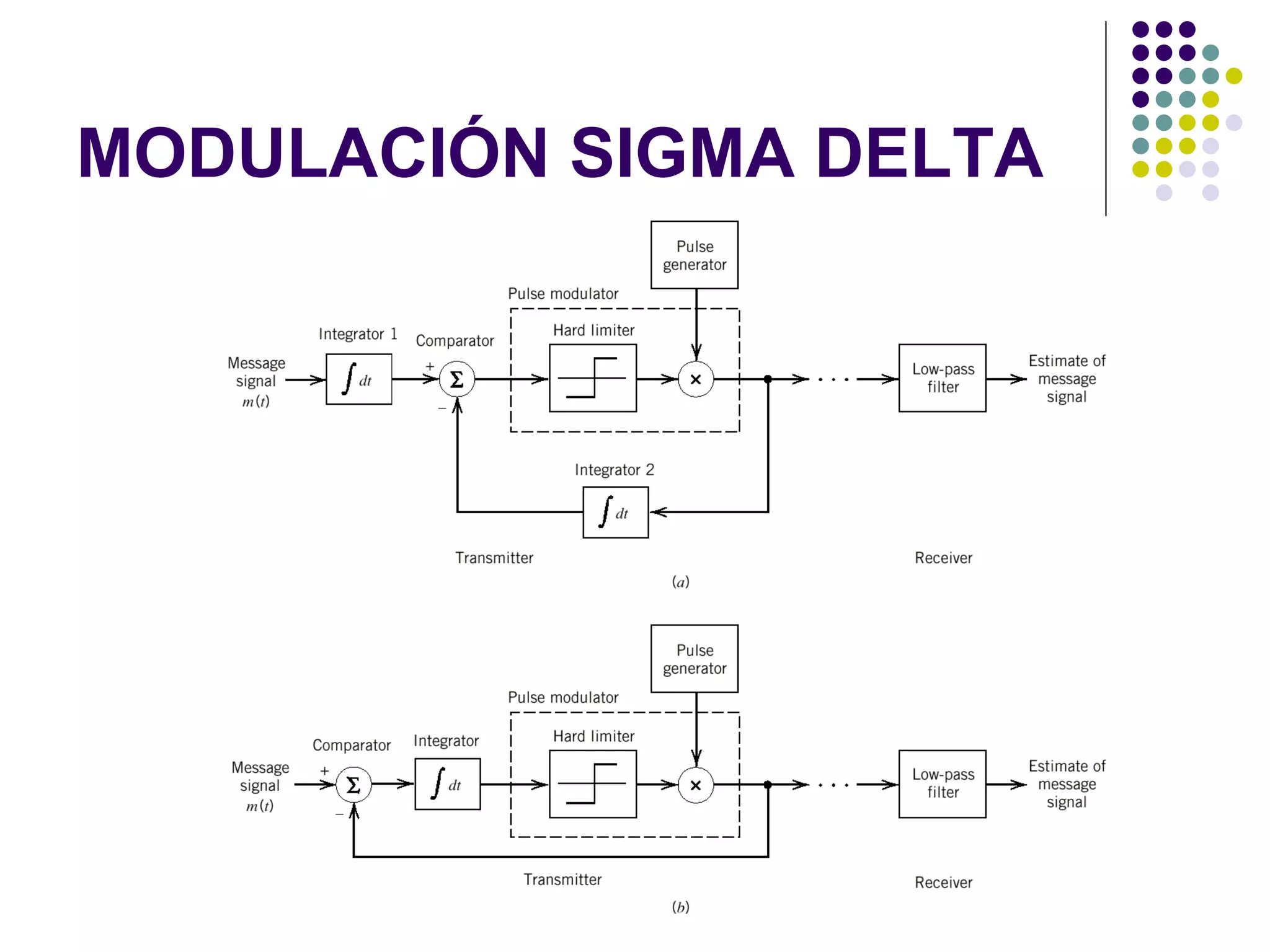
Introducción al modulador Sigma Delta, enfatizando su simplicidad y filtrado.
La modulación PCM diferencial y cómo reduce la redundancia en señales correlacionadas.
Proceso de codificación en DPCM donde el error de predicción afecta la señal final.
Similitudes entre DPCM y DM, así como problemas de distorsión en ambos sistemas.
Listado de bibliografía relevante sobre sistemas de comunicación.















































